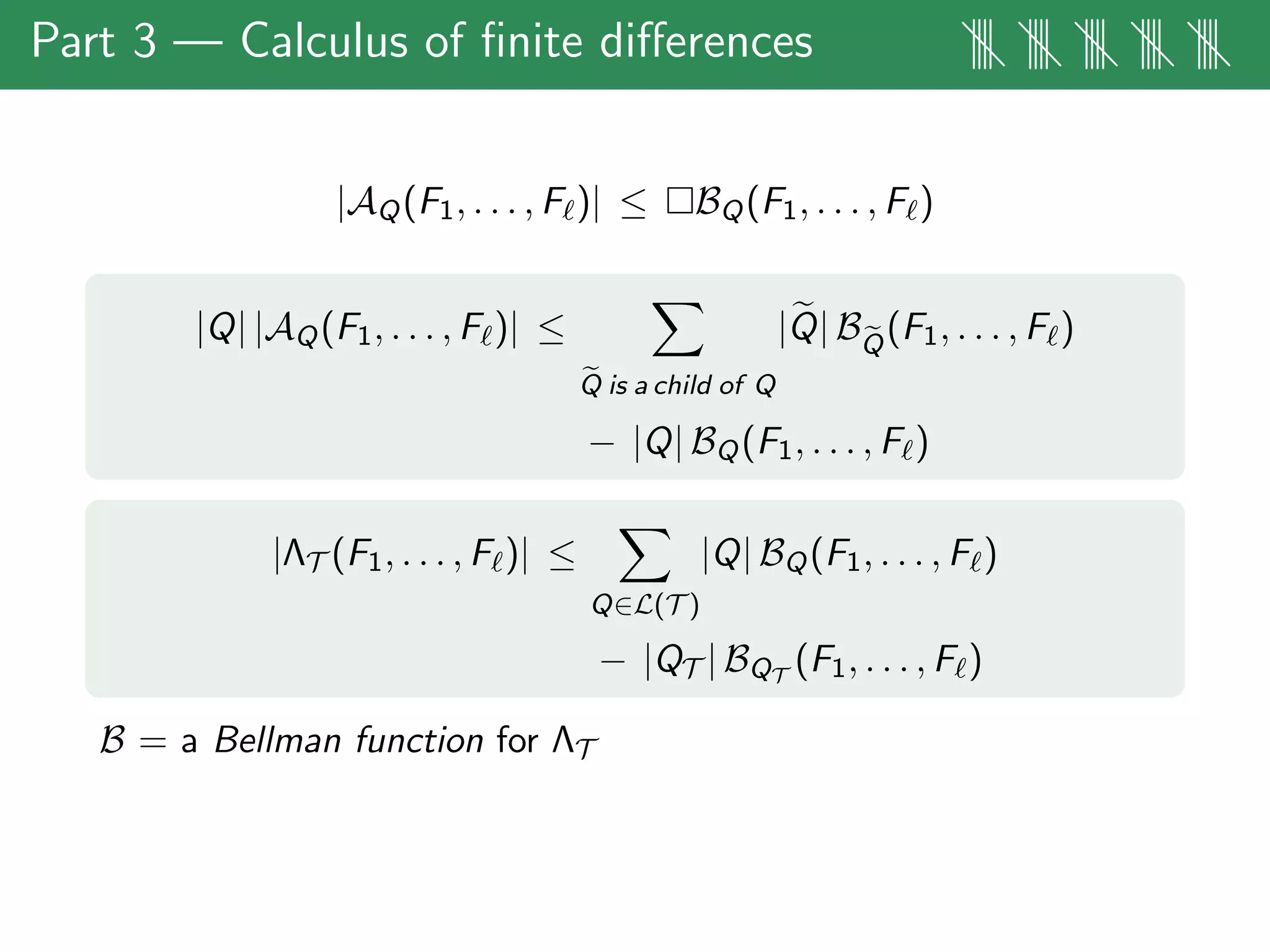
The document discusses estimates for non-standard bilinear multipliers, presenting various results and motivations for multilinear estimates and techniques. It covers the transition from dyadic model operators to continuous-type operators, as well as examples of bilinear and trilinear Hilbert transforms. The talk emphasizes open problems in the field and the complex structures involved in multilinear singular integral forms.

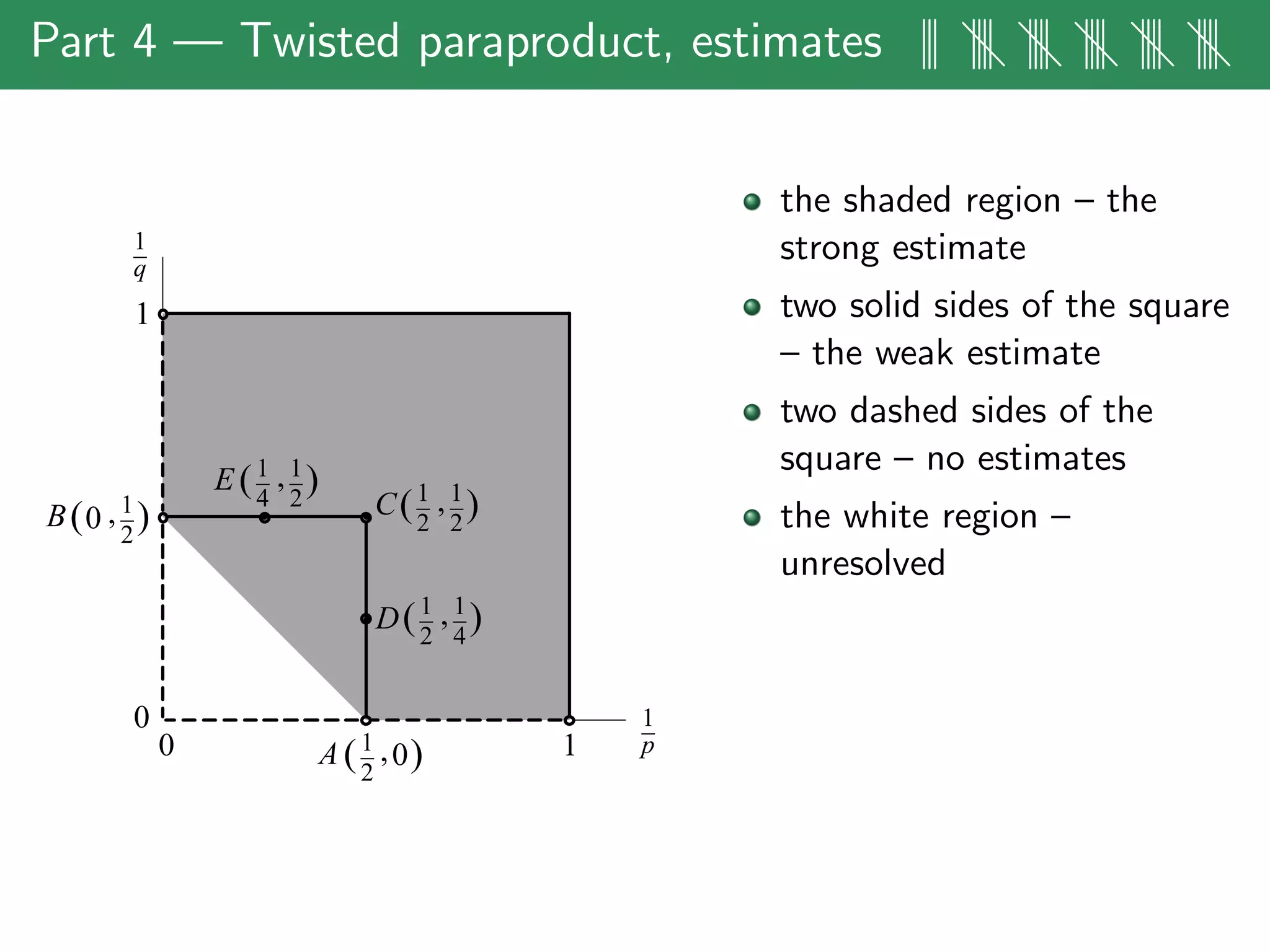
![Part 4 — Twisted paraproduct || |||| |||| |||| |||| ||||
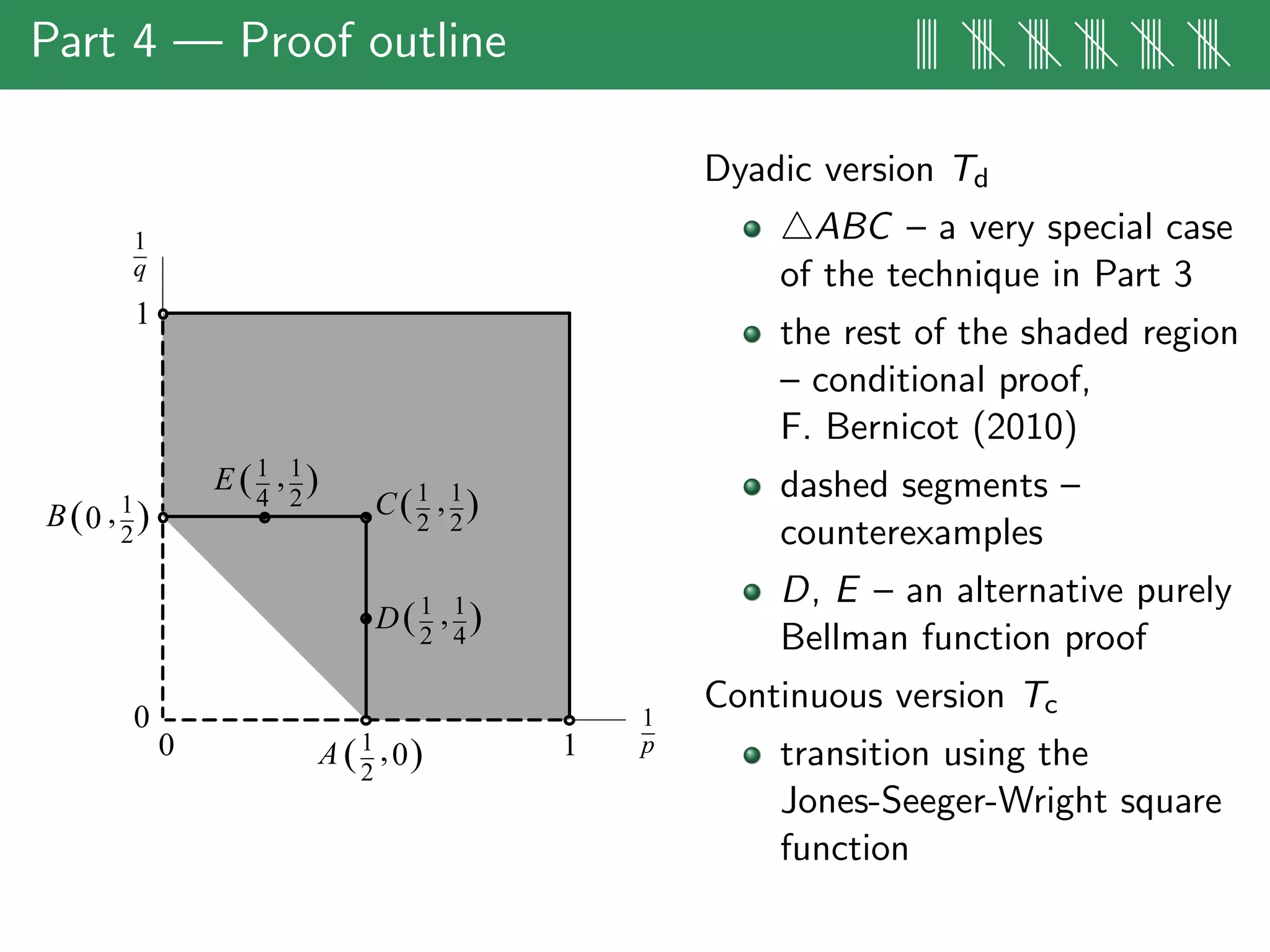
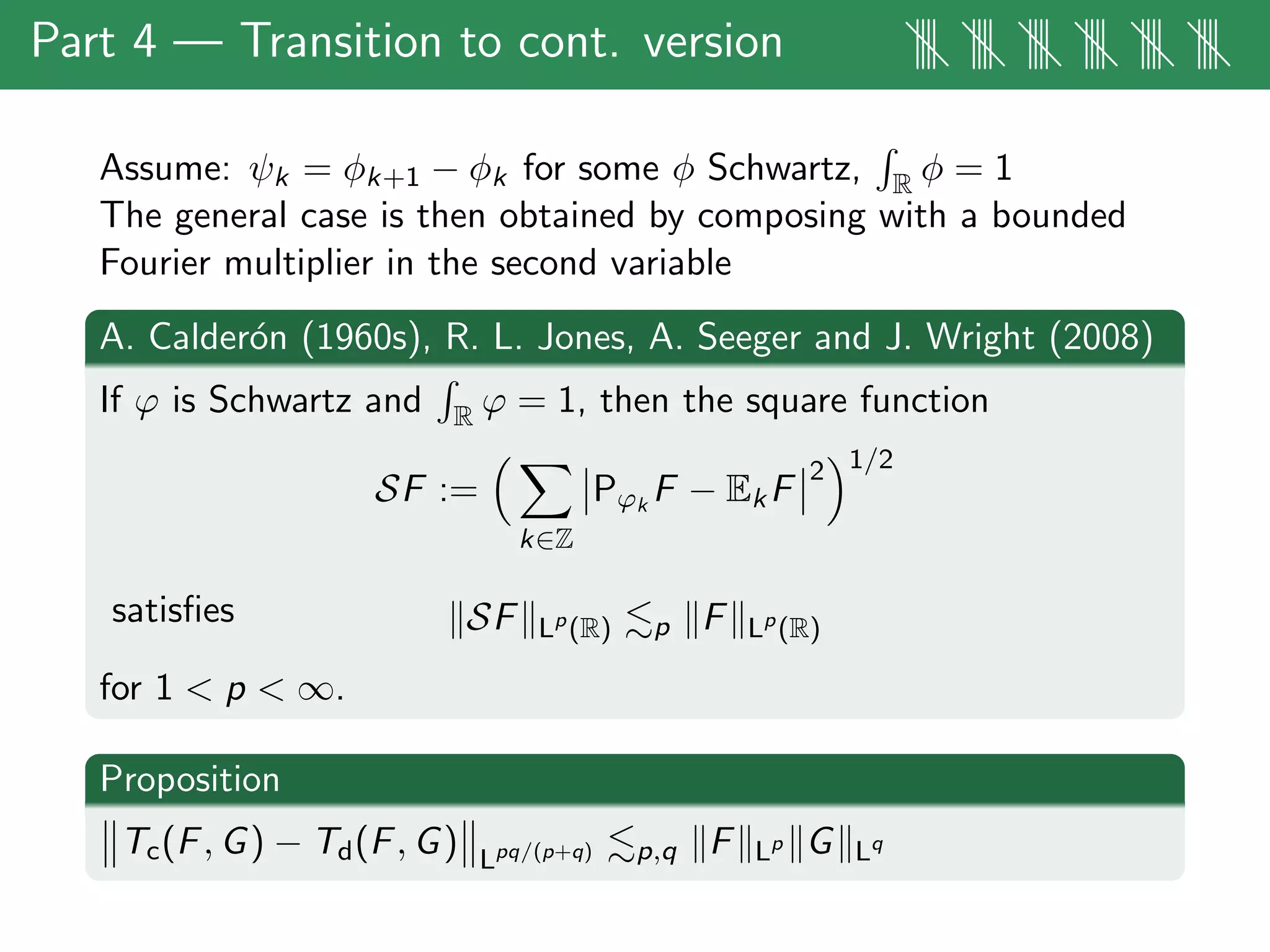
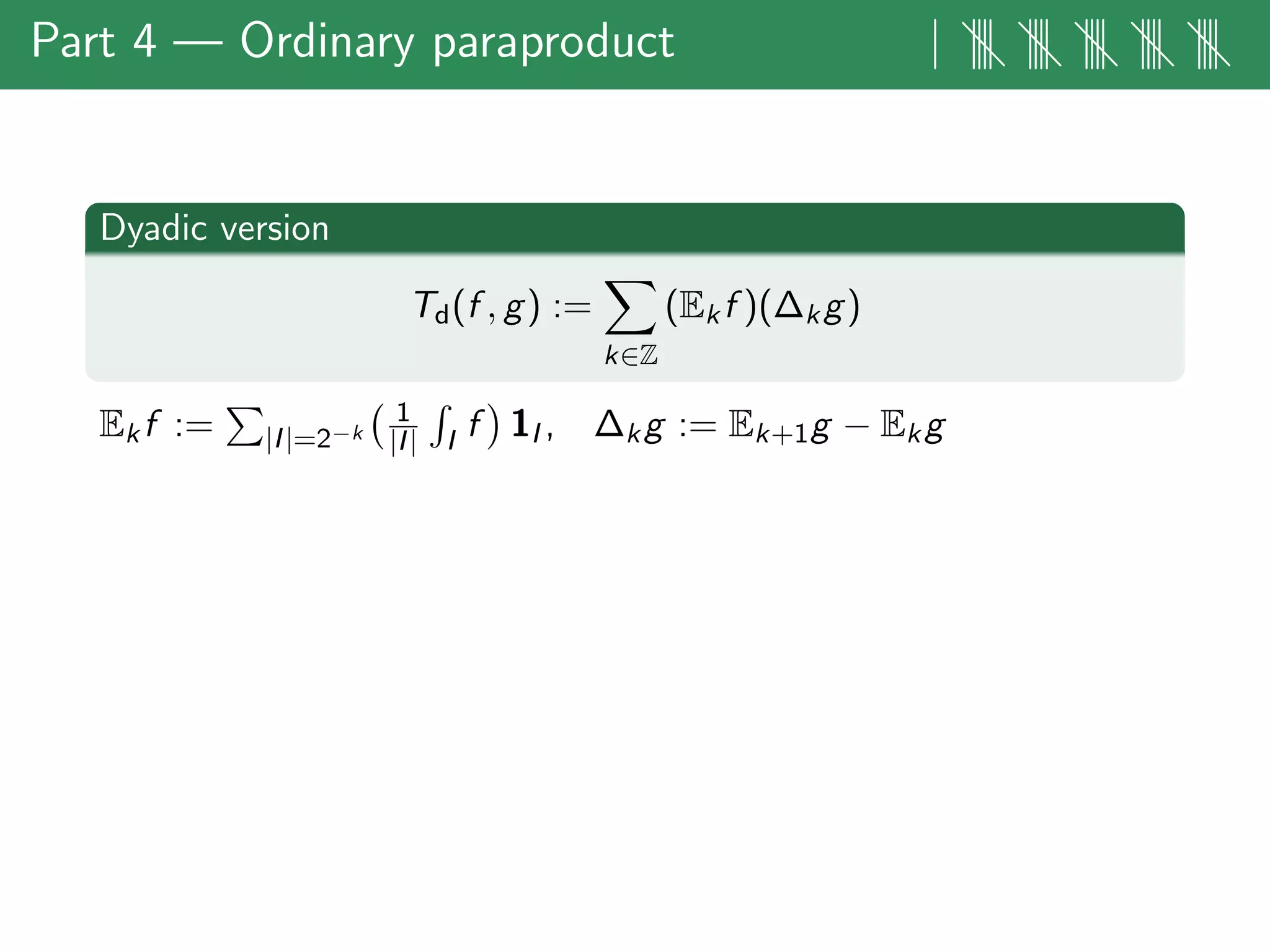
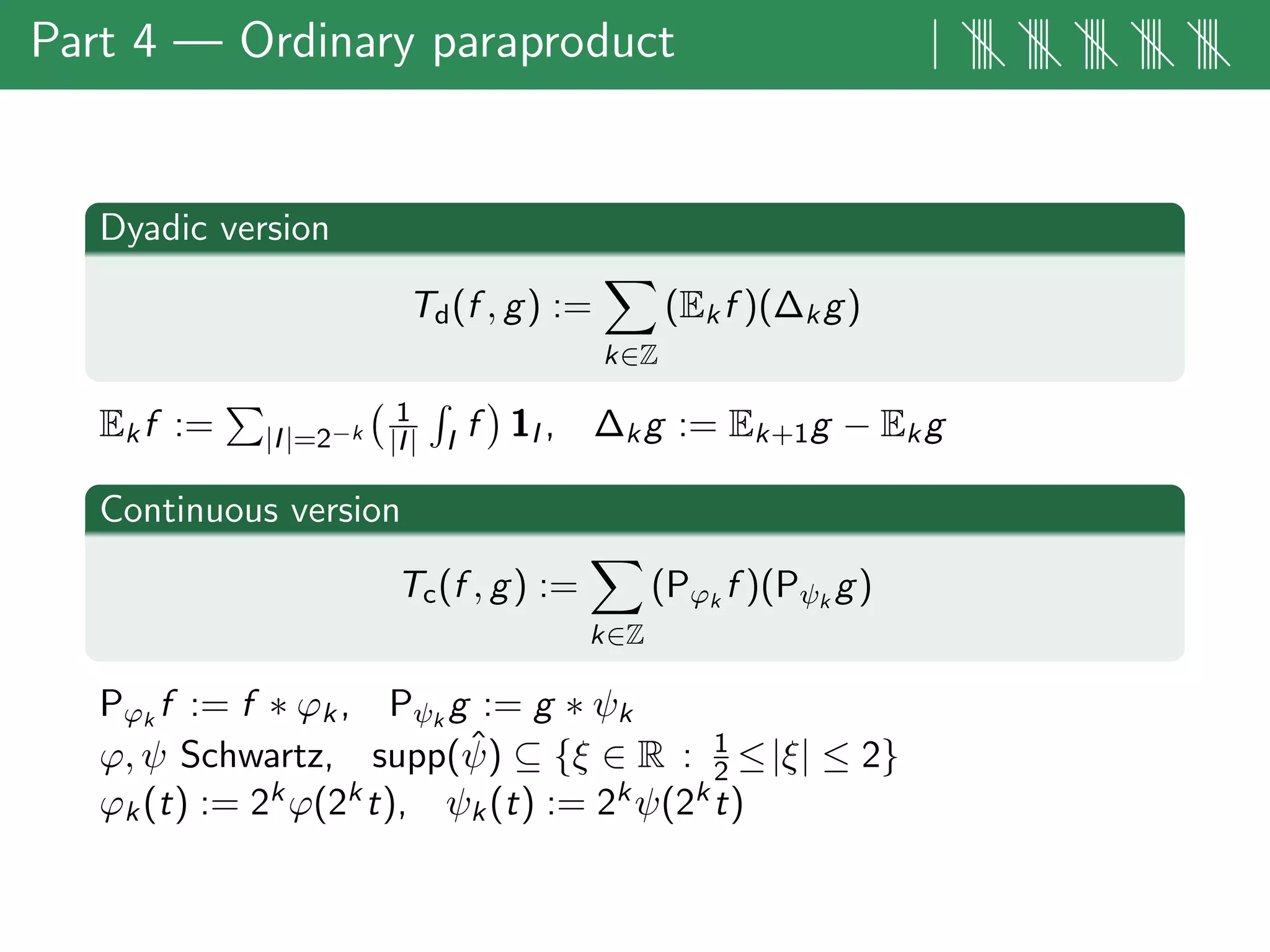
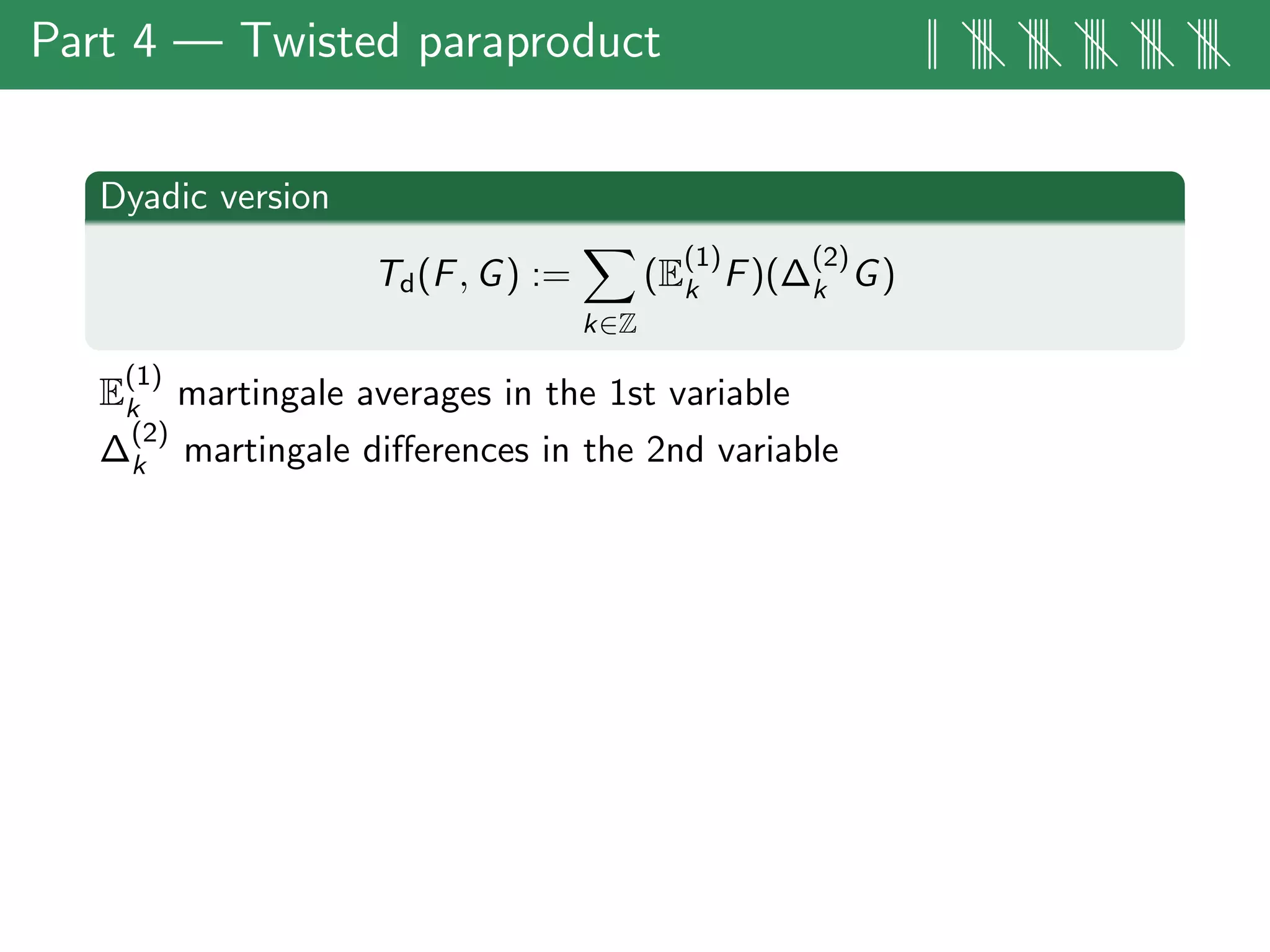
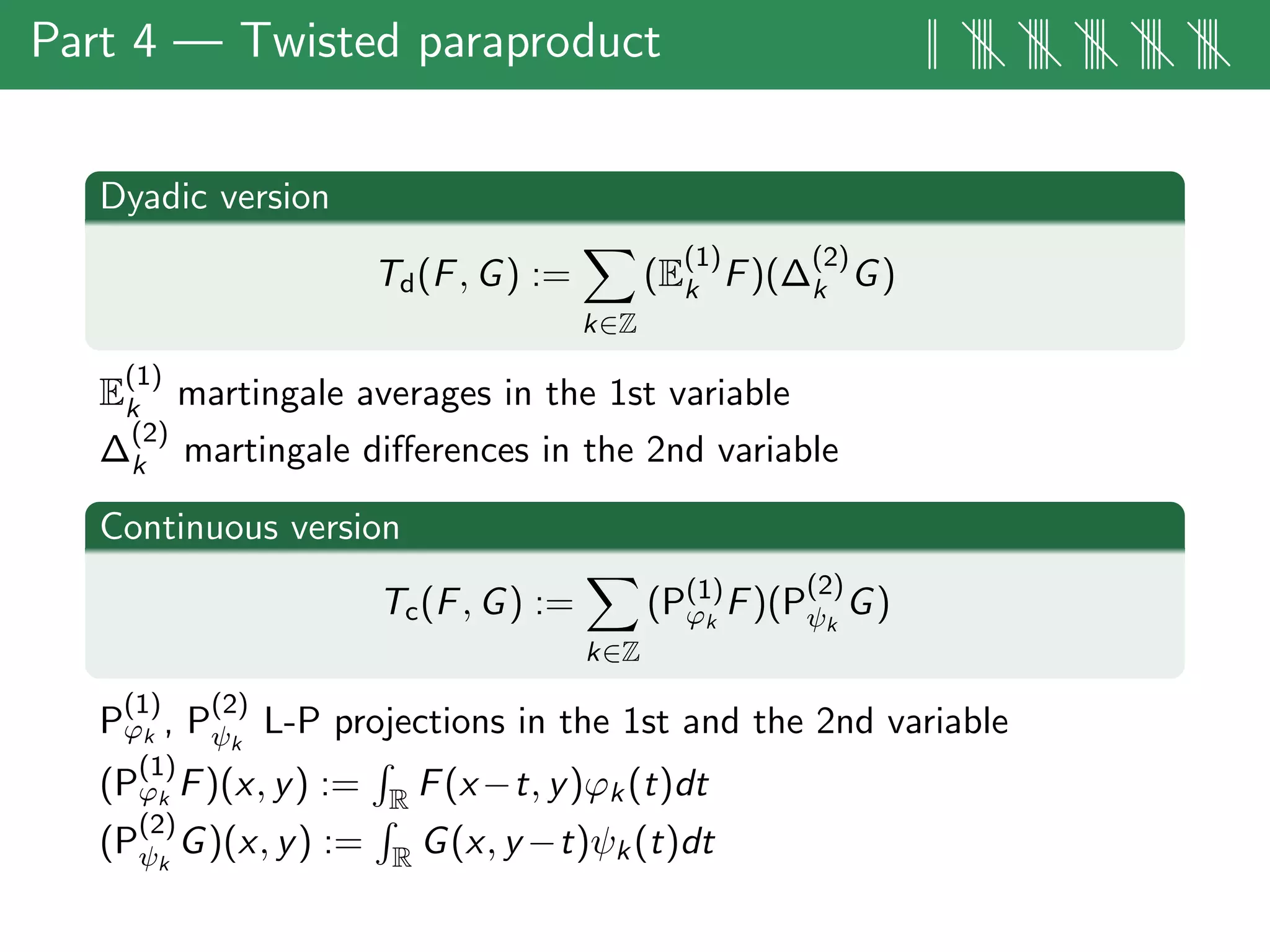
Dyadic version
Td(F, G) :=
k∈Z
(E
(1)
k F)(∆
(2)
k G)
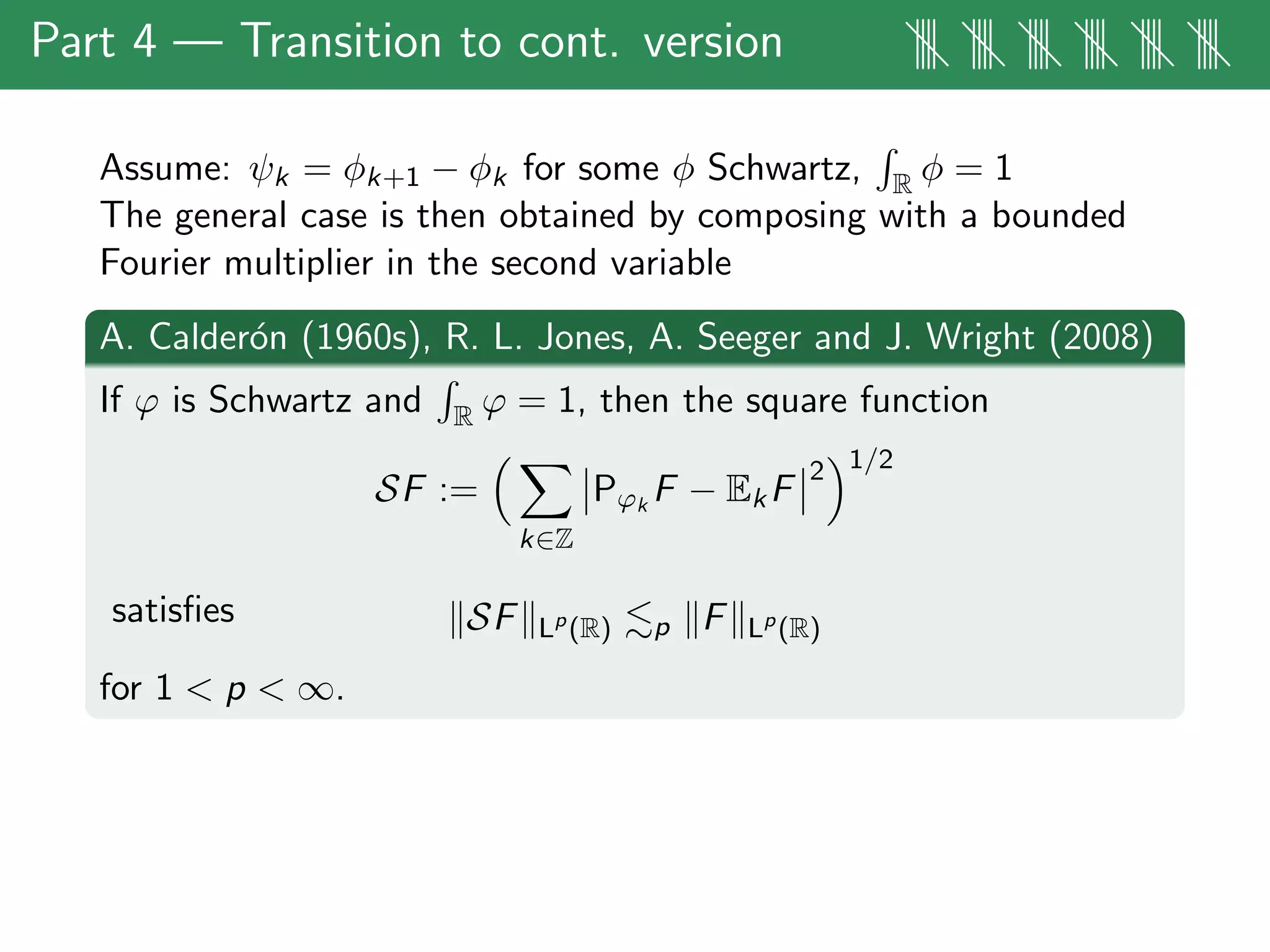
Continuous version
Tc(F, G) :=
k∈Z
(P(1)
ϕk
F)(P
(2)
ψk
G)
Bilinear multipliers from our theorems reduce to these
using cone decomposition of the symbol:
m =
j
m[j]
from the Fourier series
m[j]
(ξ1, η2) =
k∈Z
ϕ
[j]
k (ξ1) ψ
[j]
k (η2)](https://image.slidesharecdn.com/kovaccrm2013-190108093130/75/Estimates-for-a-class-of-non-standard-bilinear-multipliers-84-2048.jpg)