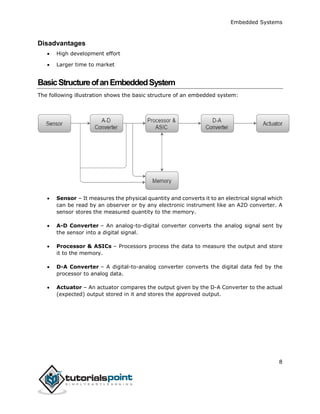
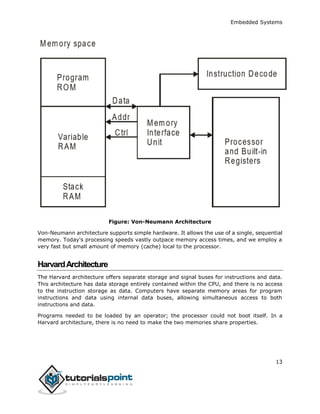
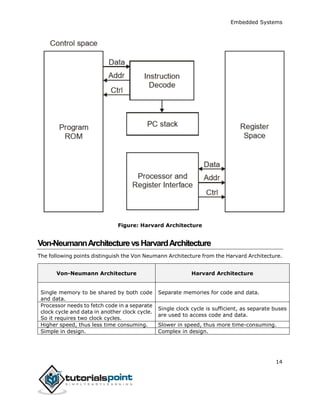
This document is a tutorial on embedded systems, explaining their definition, characteristics, and design processes using microcontrollers, specifically the 8051 microcontroller. It covers topics such as the basic structure of embedded systems, types of processors, architectures, and programming fundamentals. The tutorial is aimed at students of electronics and necessitates a foundational understanding of basic electronics concepts.