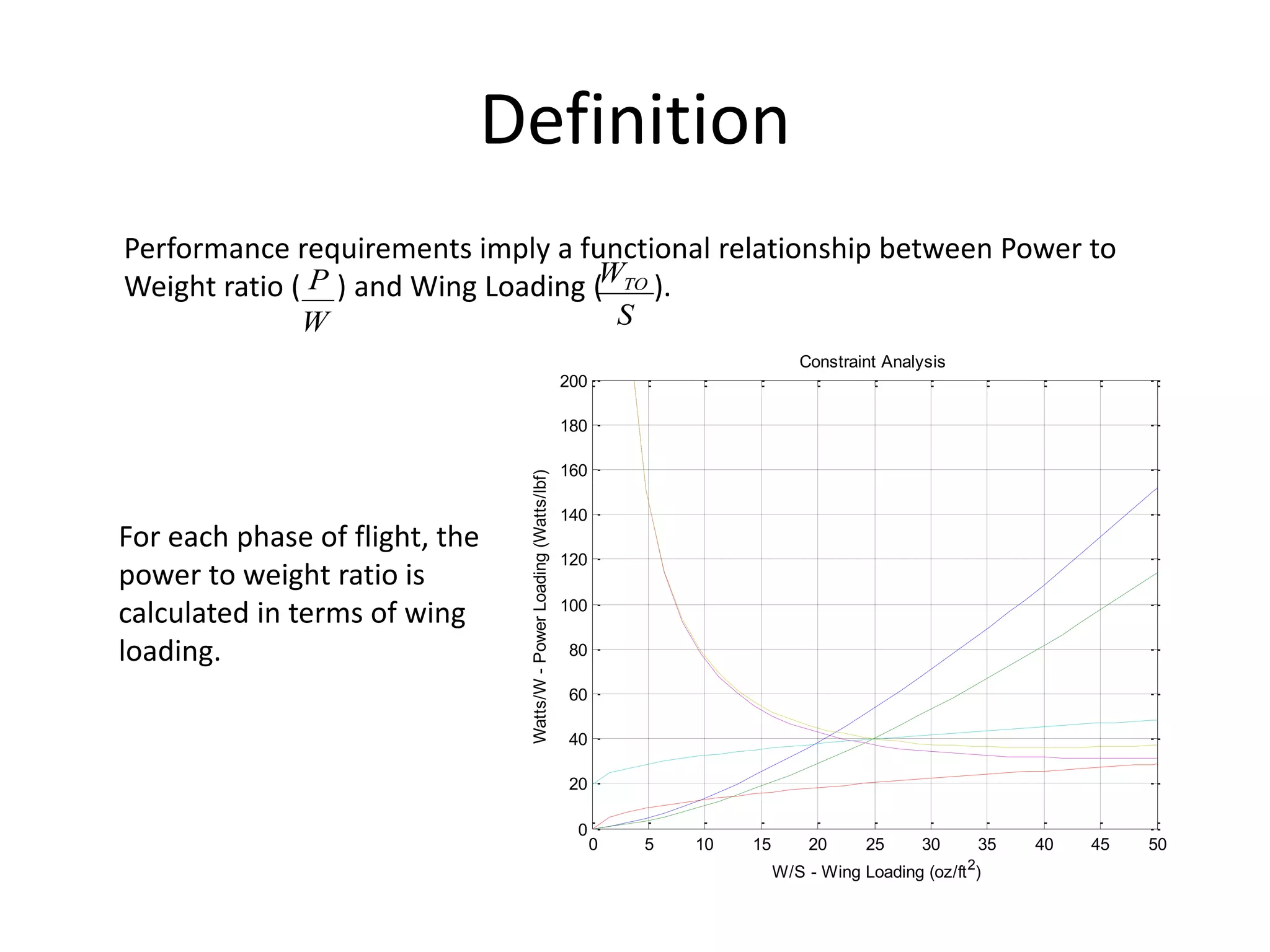
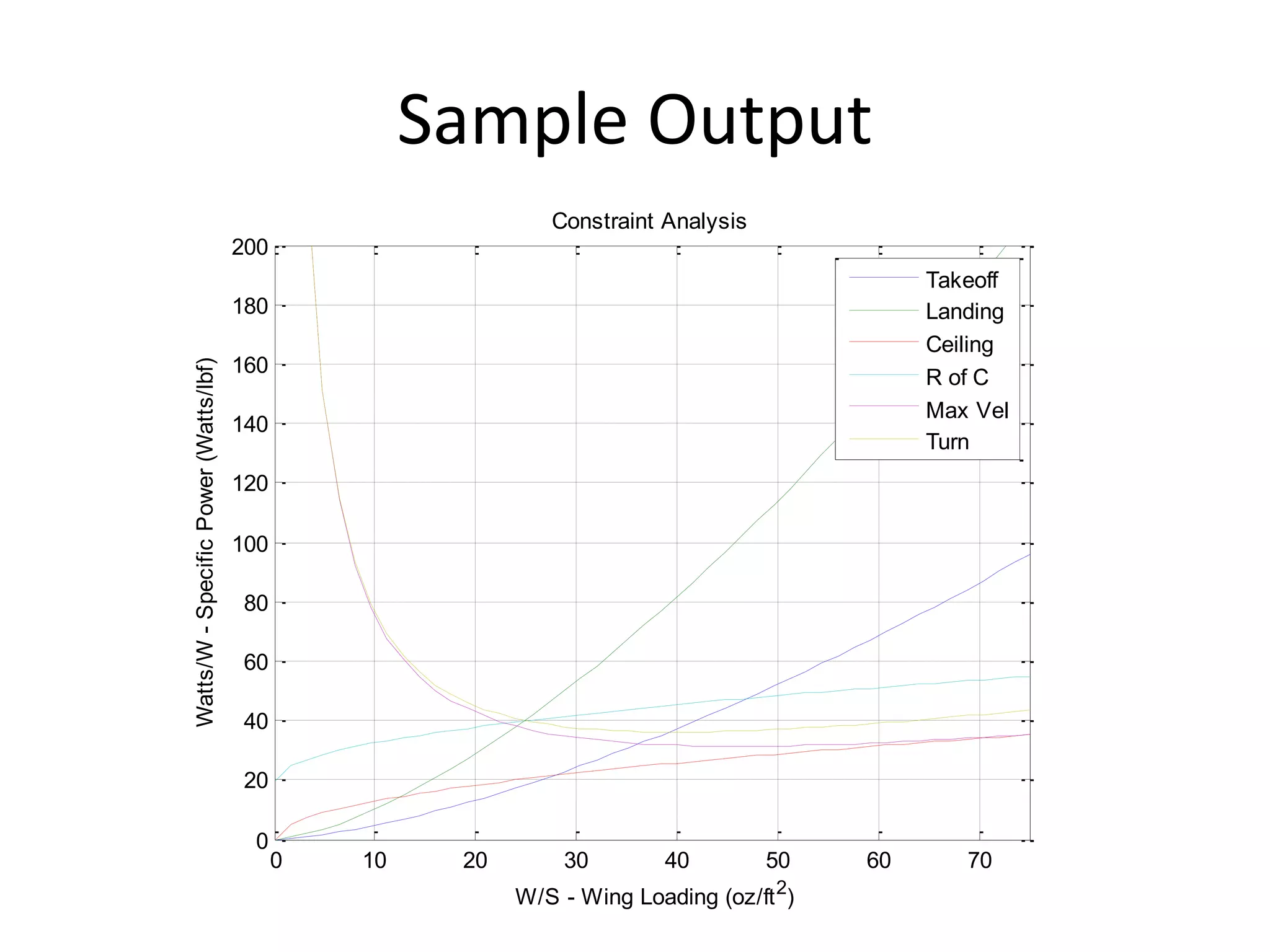
This document describes an analysis of the design constraints and weight estimation for an electric propeller-driven RC aircraft. It outlines the development of computer programs to model the aircraft's performance based on input parameters, calculate required power-to-weight ratios for different flight phases, and estimate take-off weight based on battery weight. The programs analyze how wing loading and power-to-weight ratio are related given performance requirements, and compute the battery, payload, and empty weights needed to meet those requirements.


























![Mission Profiles (missionx.m)
• Place blue text in mission files in any sequence and any number of times. Required
inputs are placed in <> and outputs include flight segment name (leg(i,:)), battery
weight fraction (wb_wto(i,:)), velocity (v(i,:)) in ft/s, time (t(i,:)) in seconds and
distance (x(i,:)) in feet. Input units are feet and degrees.
• Take-off:
[leg(i,:) wb_wto(i,:) v(i,:) t(i,:) x(i,:)]=takeoffp((<altitude>, <Clmax>)
• Straight & Level Flight
– Cruise Type 1 (Min. Power Consumption)
[leg(i,:) wb_wto(i,:) v(i,:) t(i,:) x(i,:)]=cruise1p(<altitude>, <distance>);
– Cruise Type 2 (Specified Velocity)
[leg(i,:) wb_wto(i,:) v(i,:) t(i,:) x(i,:)]=cruise2p(<altitude>, <distance>, <velocity>);
– Loiter (Max. Endurance)
[leg(i,:) wb_wto(i,:) v(i,:) t(i,:) x(i,:)]=loiterp(<altitude>, <distance>);
• Turns
– Turn Type 1 (Min. Power Consumption)
[leg(i,:) wb_wto(i,:) v(i,:) t(i,:) x(i,:)]=turn1p(<altitude>, <angle>);
– Turn Type 2 (Velocity Specified)
[leg(i,:) wb_wto(i,:) v(i,:) t(i,:) x(i,:)]=turn1p(<altitude>, <velocity>, <angle>);
Note: Climb module available, but current version requires improvement and is not recommended for use.](https://image.slidesharecdn.com/electricpropelleraircraftsizing-230324235026-bced81fe/75/Electric_Propeller_Aircraft_Sizing-pptx-30-2048.jpg)













![L3 - Aerodynamics [BB] for AGP Project Work](https://cdn.slidesharecdn.com/ss_thumbnails/l3-aerodynamicsbb-250321220306-5985ad4a-thumbnail.jpg?width=640&height=640&fit=bounds)






































