Download as PDF, PPTX


![UMat
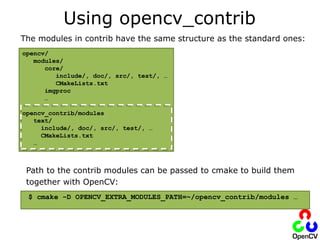
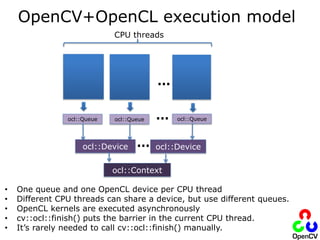
• UMat is new type of array that wraps clmem when OpenCL is available
• Replacing Mat with UMat is often the only change needed
#include "opencv2/opencv.hpp"
using namespace cv;
int main(int argc, char** argv)
{
Mat img, gray;
img = imread(argv[1], 1);
imshow("original", img);
cvtColor(img, gray,
COLOR_BGR2GRAY);
GaussianBlur(gray, gray,
Size(7, 7), 1.5);
Canny(gray, gray, 0, 50);
imshow("edges", gray);
waitKey();
return 0;
}
#include "opencv2/opencv.hpp"
using namespace cv;
int main(int argc, char** argv)
{
UMat img, gray;
img = imread(argv[1]).getUMat();
imshow("original", img);
cvtColor(img, gray,
COLOR_BGR2GRAY);
GaussianBlur(gray, gray,
Size(7, 7), 1.5);
Canny(gray, gray, 0, 50);
imshow("edges", gray);
waitKey();
return 0;
}](https://image.slidesharecdn.com/e04opencvbradsk-150811160253-lva1-app6892/85/The-OpenCV-Open-Source-Computer-Vision-Library-Latest-Developments-a-Presentation-from-the-OpenCV-Foundation-13-320.jpg)

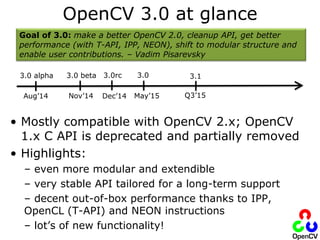
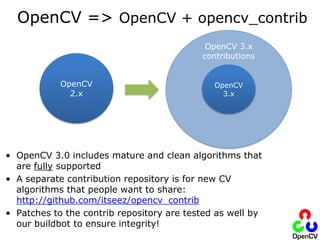
OpenCV 3.0, led by Gary Bradski, offers significant improvements over previous versions with a modular structure, enhanced performance, and support for various hardware accelerations. It introduces a transparent API for easier use of OpenCL, while maintaining compatibility with existing algorithms and featuring a contributions repository for new modules. The aim is to provide a stable and efficient platform for computer vision and machine learning, backed by strong community and corporate support.