補足01
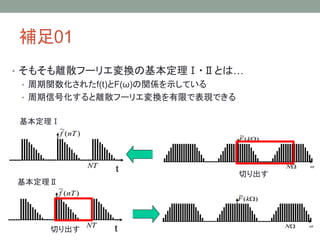
基本定理Ⅰと証明方法はほぼ同じ
m
m )()( ss
を使うと、
)(*)()(
~
s
FF 関数のフーリエ級数展開
教科書p20の式(2.14)
m
m
T
mTtmTTf
mTttTf
ttf
tfF
s
s
)()(
)()(
)()(2
)}({)(2)}(
~
{
1
-1-1
FF
m
jmT
meF
)(
~
m
m mTtF )()}(
~
{ 1-
F
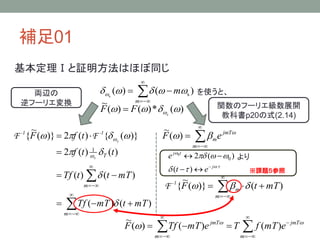
両辺の
逆フーリエ変換
j
tj
et
e
)(
)(2 0
0
より
※課題5参照
m
jmT
m
jmT
emTfTemTTfF
)()()(
~
6.
補足01
m
jmT
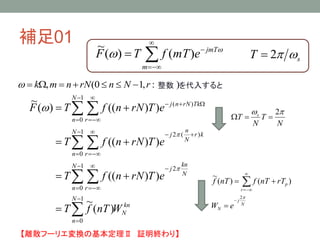
emTfTF
)()(
~
sT2
):,10(, rNnrNnmk 整数 を代入すると
kn
N
N
n
N
n r
N
kn
j
N
n r
kr
N
n
j
N
n r
TkrNnj
WnTfT
eTrNnfT
eTrNnfT
eTrNnfTF
1
0
1
0
2
1
0
)(2
1
0
)(
)(
~
))((
))((
))(()(
~
N
T
N
T s 2
N
j
N
r
p
eW
rTnTfnTf
2
)()(
~
【離散フーリエ変換の基本定理Ⅱ 証明終わり】
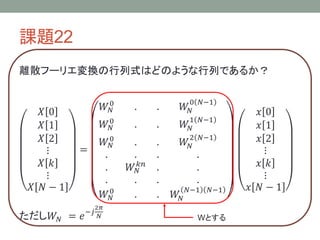
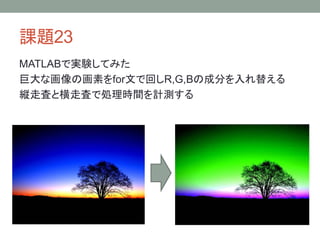
![課題23
言語によって行列の格納方
法が異なる
(矢印の方向)
C言語
x[0][0] x[0][1] x[0][2]
x[1][0] x[1][1] x[1][2]
x[2][0] x[2][1] x[2][2]
FORTRAN
x(1,1) x(1,2) x(1,3)
x(2,1) x(2,2) x(2,3)
x(3,1) x(3,2) x(3,3)
この格納方法の順に読み込む
方が効率が良い
良い例
悪い例](https://image.slidesharecdn.com/dsp2014ans3-150201044807-conversion-gate02/85/2014-11-320.jpg)
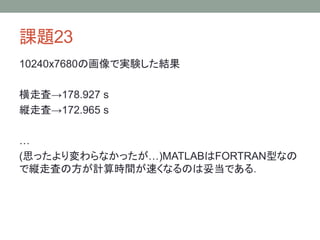
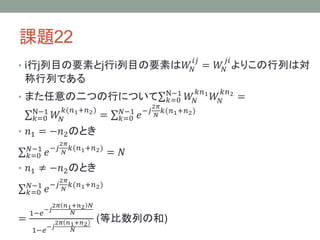
![課題24
2*2の場合
2次元離散フーリエ変換の行列式は
𝑋 0 𝑋[2]
𝑋 1 𝑋[3]
=
𝑊2
0
𝑊2
0
𝑊2
0
𝑊2
1
𝑥 0 𝑥[2]
𝑥 1 𝑥[3]
𝑊2
0
𝑊2
0
𝑊2
0
𝑊2
1
=
1 1
1 𝑒−𝑗
2𝜋
2
𝑥 0 𝑥[2]
𝑥 1 𝑥[3]
1 1
1 𝑒−𝑗
2𝜋
2
=
1 1
1 −1
𝑥 0 𝑥[2]
𝑥 1 𝑥[3]
1 1
1 −1
xは(a)-(e)で
を代入すればよい(あとは行列の代入だけなので省略)
1 1
1 1
0 0
0 0
0 0
1 1
0 1
0 1
0 1
1 0](https://image.slidesharecdn.com/dsp2014ans3-150201044807-conversion-gate02/85/2014-15-320.jpg)
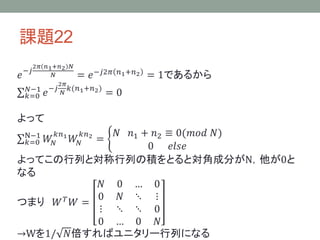
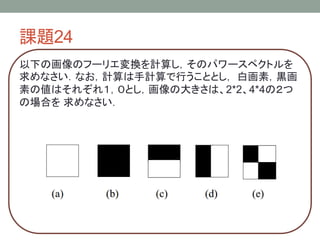
![課題24
4*4の場合
離散フーリエ変換の行列式は
𝑋 0 𝑋 4 𝑋[8] 𝑋[12]
𝑋 1 𝑋 5 𝑋[9] 𝑋[13]
𝑋[2] 𝑋[6] 𝑋[10] 𝑋[14]
𝑋[3] 𝑋[7] 𝑋[11] 𝑋[15]
=
𝑊4
0
𝑊4
0
𝑊4
0
𝑊4
0
𝑊4
0
𝑊4
1
𝑊4
2
𝑊4
3
𝑊4
0
𝑊4
2
𝑊4
4
𝑊4
6
𝑊4
0
𝑊4
3
𝑊4
6
𝑊4
9
𝑥 0 𝑥 4 𝑥[8] 𝑥[12]
𝑥 1 𝑥 5 𝑥[9] 𝑥[13]
𝑥[2] 𝑥[6] 𝑥[10] 𝑥[14]
𝑥[3] 𝑥[7] 𝑥[11] 𝑥[15]
𝑊4
0
𝑊4
0
𝑊4
0
𝑊4
0
𝑊4
0
𝑊4
1
𝑊4
2
𝑊4
3
𝑊4
0
𝑊4
2
𝑊4
4
𝑊4
6
𝑊4
0
𝑊4
3
𝑊4
6
𝑊4
9
=
1 1 1 1
1 −𝑗 −1 𝑗
1 −1 1 −1
1 𝑗 −1 −𝑗
𝑥 0 𝑥 4 𝑥[8] 𝑥[12]
𝑥 1 𝑥 5 𝑥[9] 𝑥[13]
𝑥[2] 𝑥[6] 𝑥[10] 𝑥[14]
𝑥[3] 𝑥[7] 𝑥[11] 𝑥[15]
1 1 1 1
1 −𝑗 −1 𝑗
1 −1 1 −1
1 𝑗 −1 −𝑗
0 0 0 0
0 0 0 0
1 1 1 1
1 1 1 1代入](https://image.slidesharecdn.com/dsp2014ans3-150201044807-conversion-gate02/85/2014-16-320.jpg)
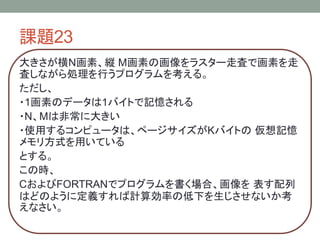
![課題25
長さが異なれば足し合わせることができないので短い方に0を
補間する →パワースペクトルの波形が変わる
実際,短い方に値をどのように補間しても線形性を保つことが
できないので
x1 n : 長さN1 ↔ 𝐹1[𝑘]
x2 n : 長さN2 ↔ 𝐹2[𝑘](𝑁2 < 𝑁1)
において𝑥2 𝑛 に0を𝑁2 − 𝑁1個だけ追加した𝑥2’ 𝑛 を考える
この時𝑦 𝑛 = 𝑎𝑥1 𝑛 + 𝑏𝑥2’[𝑛]とすると
Y k = aX1 k + bX2′[k]というのが正しい表記である](https://image.slidesharecdn.com/dsp2014ans3-150201044807-conversion-gate02/85/2014-19-320.jpg)
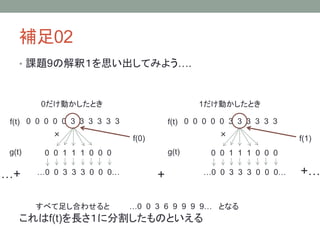
![補足02
𝑥 𝑘 𝑛 =
𝑥 𝑛 (𝑘𝐿 ≤ 𝑘 + 1 𝐿 − 1, 𝑘 > 0)
0 (その他)
このときx[n]とy[n]の離散畳み込みw[n]は
𝑤 𝑛 = 𝑥 𝑛 ∗ 𝑦 𝑛 = 𝑘=0
∞
𝑥 𝑘 𝑛 ∗ 𝑦[𝑛] であることを証明しな
さい](https://image.slidesharecdn.com/dsp2014ans3-150201044807-conversion-gate02/85/2014-20-320.jpg)
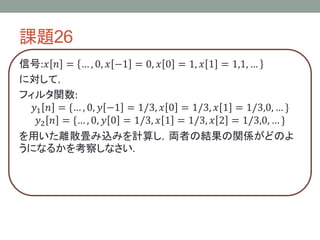
![補足02
𝑤 𝑛 = 𝑥 𝑛 ∗ 𝑦 𝑛
離散畳み込みの式より
= 𝑘=0
∞
𝑥 𝑙 𝑦[𝑛 − 𝑙]
x[n]を長さLの部分系列の和で表現して
= 𝑙=−∞
∞
𝑘=0
∞
𝑥 𝑘 𝑙 𝑦[𝑛 − 𝑙]
線形性より
= 𝑙=−∞
∞
𝑘=0
∞
𝑥 𝑘 𝑙 𝑦[𝑛 − 𝑙]
= 𝑘=0
∞
𝑥 𝑘 𝑛 ∗ 𝑦[𝑛]](https://image.slidesharecdn.com/dsp2014ans3-150201044807-conversion-gate02/85/2014-21-320.jpg)
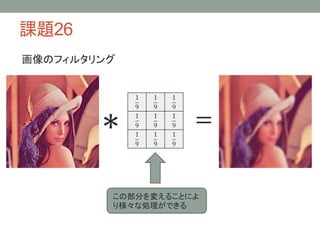
![課題26
x[n] y[n]
0 1 2 …… -1 0 1 ……
x[n]とy[n]の離散畳み込みz[n]を計算する
𝑧 𝑛 = 𝑥 𝑛 ∗ 𝑦[𝑛]](https://image.slidesharecdn.com/dsp2014ans3-150201044807-conversion-gate02/85/2014-24-320.jpg)
![課題26
x[n]
y[n]
0 1 2 ……
-1 0 1 ……
1
1/3
𝑧 0 = 0 ×
1
3
+ 1 ×
1
3
+ 1 ×
1
3
=
2
3
z[n]
2/3
0 1 2 ……
y[n]をdだけ動かした時𝑧 𝑑 = 𝑛=−∞
𝑛=∞
𝑥 𝑛 𝑦[𝑛 − 𝑑]
d=0の時](https://image.slidesharecdn.com/dsp2014ans3-150201044807-conversion-gate02/85/2014-25-320.jpg)
![課題26
x[n]
y[n]
0 1 2 ……
-1 0 1 ……
1
1/3
𝑧 1 = 1 ×
1
3
+ 1 ×
1
3
+ 1 ×
1
3
= 1
z[n]
1
0 1 2 ……
y[n]をdだけ動かした時𝑧 𝑑 = 𝑛=−∞
𝑛=∞
𝑥 𝑛 𝑦[𝑛 − 𝑑]
d=0の時](https://image.slidesharecdn.com/dsp2014ans3-150201044807-conversion-gate02/85/2014-26-320.jpg)
![課題26
x[n]
y[n]
0 1 2 ……
-1 0 1 ……
1
1/3
𝑧 1 = 1 ×
1
3
+ 1 ×
1
3
+ 1 ×
1
3
= 1
z[n]
1
0 1 2 ……
y[n]をdだけ動かした時𝑧 𝑑 = 𝑛=−∞
𝑛=∞
𝑥 𝑛 𝑦[𝑛 − 𝑑]
d=0の時](https://image.slidesharecdn.com/dsp2014ans3-150201044807-conversion-gate02/85/2014-27-320.jpg)
![課題26
x[n]
y[n]
0 1 2 ……
-1 0 1 ……
1
1/3
z[n]
1
0 1 2 ……
x[n]にy[n]を畳み込むことによって0と1の境界部分が滑らかに変
化するようになる](https://image.slidesharecdn.com/dsp2014ans3-150201044807-conversion-gate02/85/2014-28-320.jpg)
![課題26
x[n]
y[n]
0 1 2 ……
-1 0 1 ……
1
1/3
z[n]
1
-1 0 1 ……
𝑦2[𝑛]の場合も同様に計算して図のようになる.](https://image.slidesharecdn.com/dsp2014ans3-150201044807-conversion-gate02/85/2014-29-320.jpg)
![課題26
clear all %前処理
close all
im=imread('lena.jpg'); %画像の読み込み
im= rgb2gray(im); %グレ-スケール化
subplot(1,2,1);
imshow(im); %元画像の表示
im=double(im); %uint8→double型へ
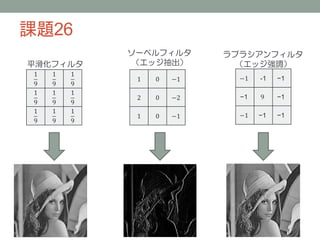
f=[1,1,1;1,1,1;1,1,1]/9; %フィルタの作成
imout=filter2(f,im,'same');%元画像とフィルタの畳み込み
imout=uint8(imout); %double→uint型へ
subplot(1,2,2);
imshow(imout); %平滑化した画像の表示](https://image.slidesharecdn.com/dsp2014ans3-150201044807-conversion-gate02/85/2014-31-320.jpg)