Downloaded 14 times

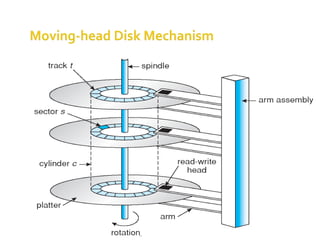
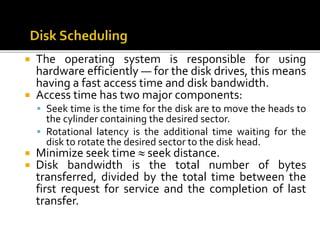
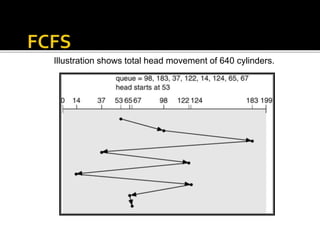
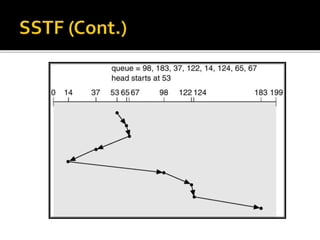
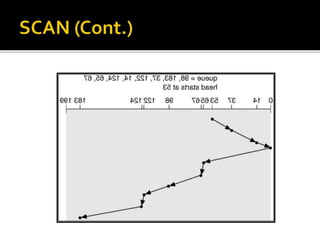
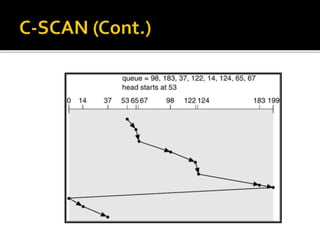

This document discusses disk scheduling algorithms used by operating systems to optimize disk access time and bandwidth. It explains that disk requests are queued and disks have seek time and rotational latency when accessing data. It then describes common first-come, first-served scheduling algorithms like SSTF, SCAN, C-SCAN, and LOOK that aim to minimize disk head movement and keep the disk busy by selecting the next request that is closest to the current head position.