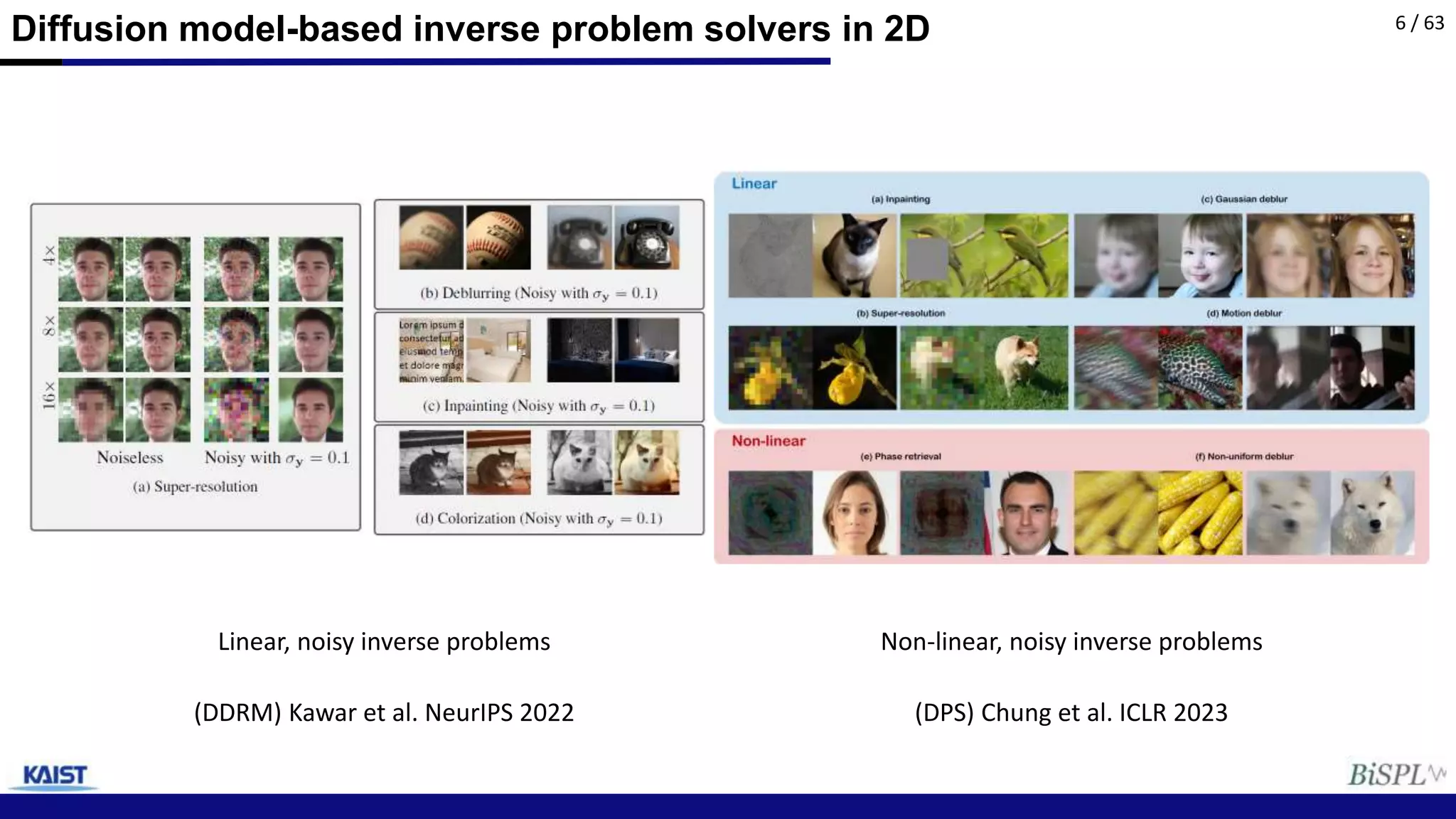
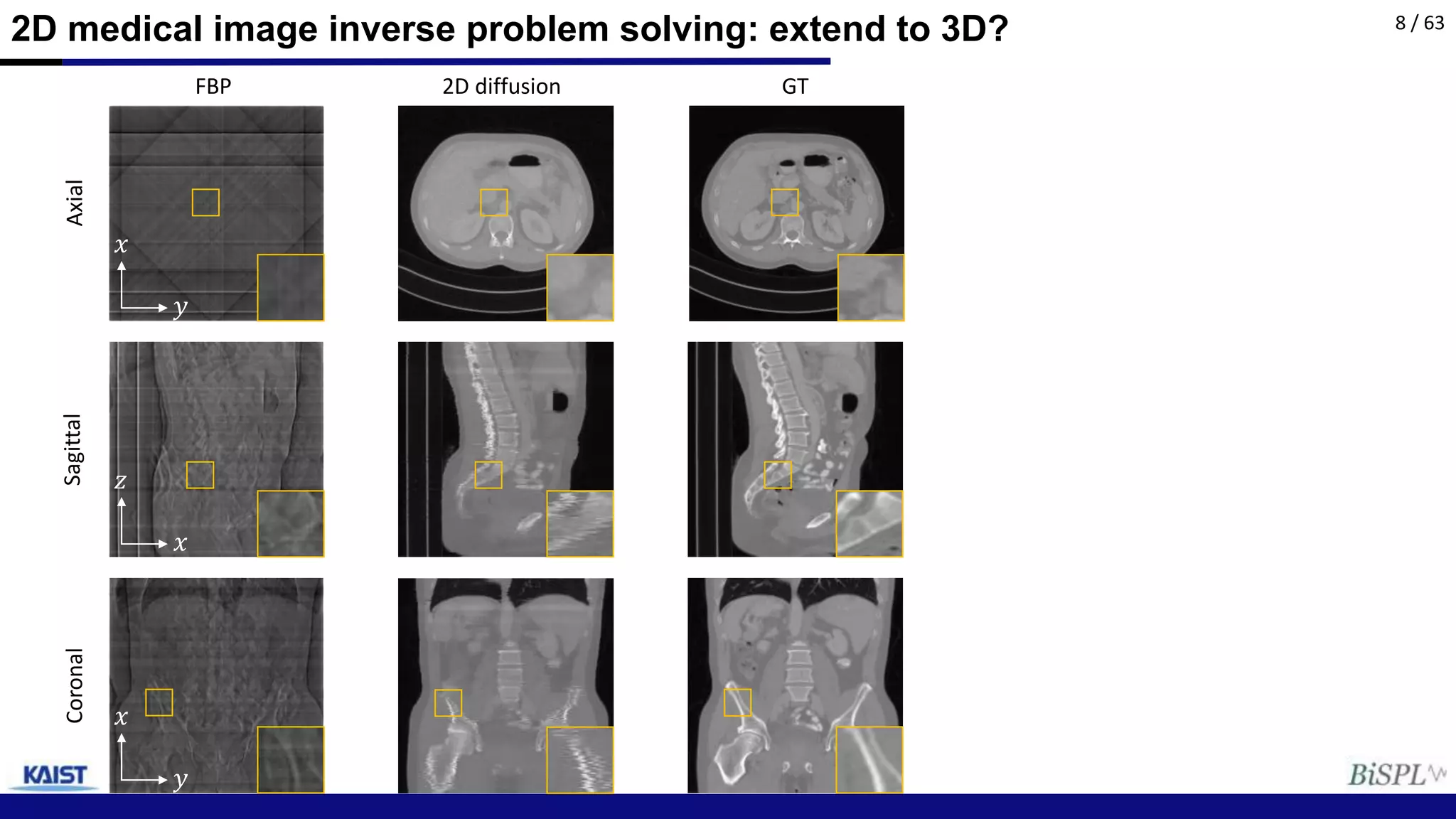
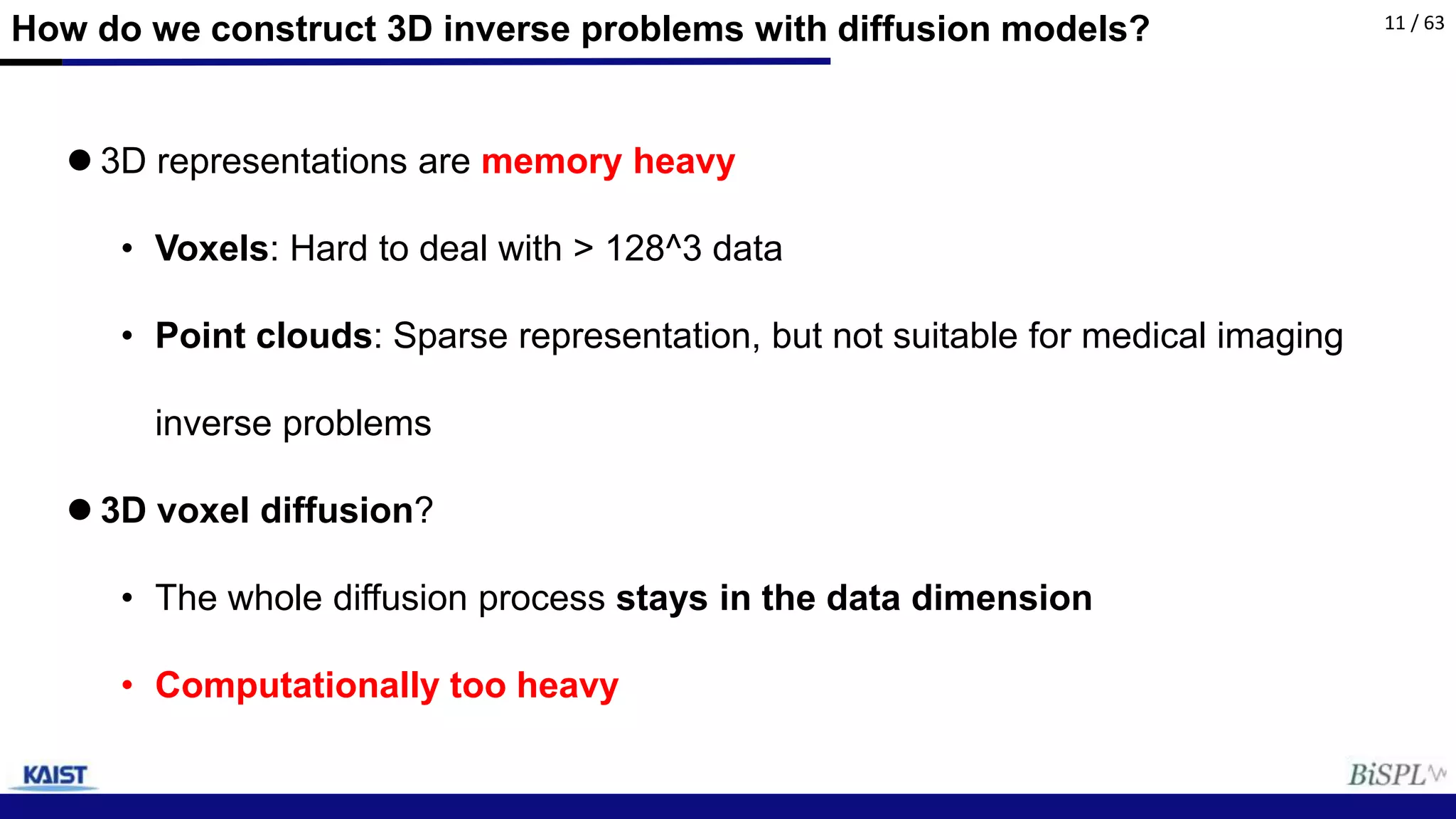
This document proposes a method called Fast DiffusionMBIR to solve 3D inverse problems using pre-trained 2D diffusion models. It augments the 2D diffusion prior with a model-based total variation prior to encourage consistency across image slices. The method performs denoising across image slices in parallel using a 2D diffusion score function, and then jointly optimizes data consistency and the total variation prior between slices. It shares primal and dual variables between iterations for faster convergence. Results on sparse-view CT reconstruction show coherent volumetric results across all slices.

![http://yang-song.github.io/blog/2021/score/
Background: Diffusion models and Stein score
Explicit score matching
Denoising score matching
Equivalent (Vincent et al. 2010)
𝜽∗
= argmin
𝜽
𝔼[‖∇𝐱log 𝑝 𝐱 − 𝐬𝜽(𝐱)‖2
2
]
𝜽∗ = argmin
𝜽
𝔼[‖∇𝐱log 𝑝 𝐱 | 𝐱 − 𝐬𝜽(𝐱)‖2
2
]
2 / 63](https://image.slidesharecdn.com/diffusionmbirpresentationslide-230313023314-a5670ea9/75/DiffusionMBIR_presentation_slide-pptx-2-2048.jpg)





























![[DL輪読会] Spectral Norm Regularization for Improving the Generalizability of De...](https://cdn.slidesharecdn.com/ss_thumbnails/dlhackspectralnorm1-170907072536-thumbnail.jpg?width=640&height=640&fit=bounds)
![[Track2-5] CPUだけでAIをやり切った最近のお客様事例 と インテルの先進的な取り組み](https://cdn.slidesharecdn.com/ss_thumbnails/intel20200801dllabdeeplearningdigitalconferencefinalv1-200806120825-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]NVAE: A Deep Hierarchical Variational Autoencoder](https://cdn.slidesharecdn.com/ss_thumbnails/nvaeadeephierarchicalvariationalautoencoder-201113004930-thumbnail.jpg?width=640&height=640&fit=bounds)