Download to read offline
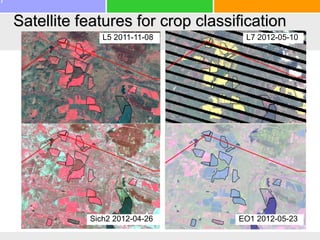
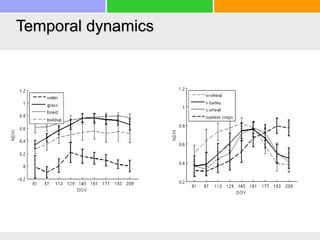
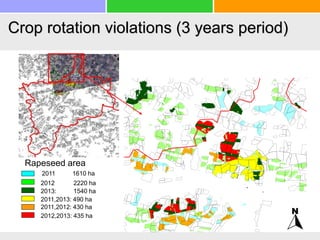
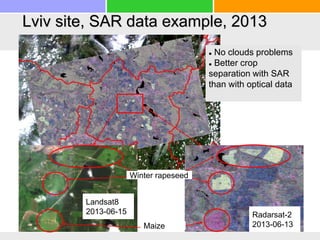
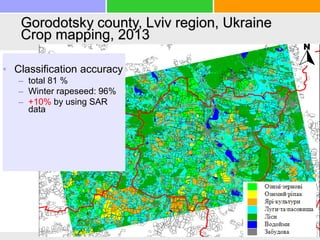
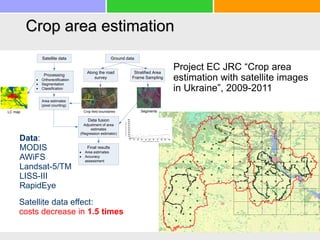
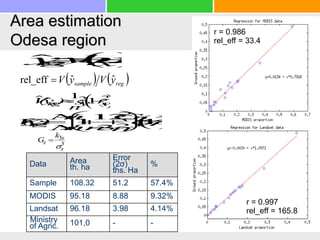
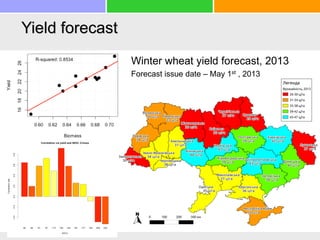
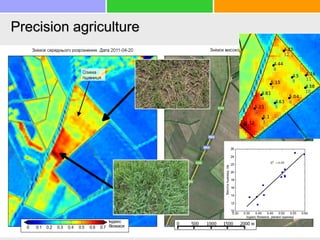
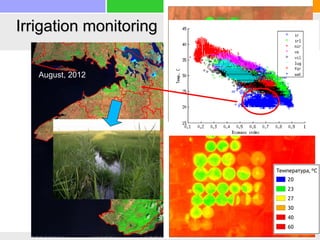
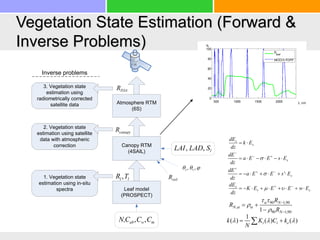
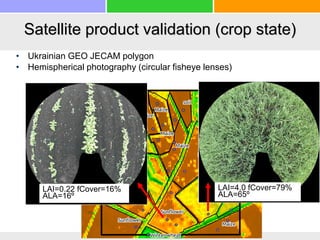



The document discusses the utilization of satellite imagery for agricultural monitoring and analysis, specifically in Ukraine. It details various satellite data resolutions and their applications in estimating crop areas, yield forecasting, and vegetation state assessment. The report includes information on data processing techniques, classification accuracy in crop mapping, and challenges related to geolocation errors and satellite image georeferencing.