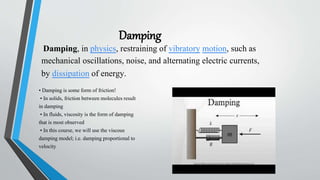
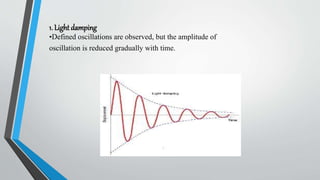
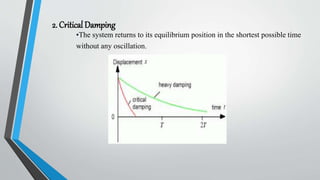
This document discusses different types of damping. It begins by defining damping as the restraining of vibratory motion through dissipation of energy. It then describes three main types of damping: 1) light damping where oscillations gradually decrease over time, 2) critical damping where the system returns to equilibrium in the shortest time without oscillating, and 3) heavy damping where the system slowly returns to equilibrium without oscillating. The document also discusses viscous damping, Coulomb damping, structural damping, and nonlinear damping. It provides examples of damping in different engineering systems and diagrams to illustrate underdamped, overdamped, and critically damped systems.