※資料中の一部数式、図、画像について
2Photon Mapping. RENERING1HCAMP 2013/8/24
背景色がこの色 の図、数式、Henrik Wann Jensen先生のスライドにあったもの
を使用させていただいています。(数式の間違いと思われ部分は、多少修正し
ています。
元資料がみつからなくなってしまったので、リンクが示せませんが、
SIGGRAPH2012 Course State of the Art in Photon Density Estimation の
Photon Mapping Basics のスライドに同様の図があります。
http://users-cs.au.dk/toshiya/starpm2012/
References
• Henrik WannJensen’s HP
http://graphics.ucsd.edu/~henrik/
• Henrik Wann Jensen, 苗村 健 訳
Realistic Image Synthesis Using Photon Mapping
http://www.amazon.co.jp/dp/4274079503
• SIGGRAPH2012 Course
State of the Art in Photon Density Estimation
http://users-cs.au.dk/toshiya/starpm2012/
Photon Mapping. RENDERING1H CAMP 2013/8/24


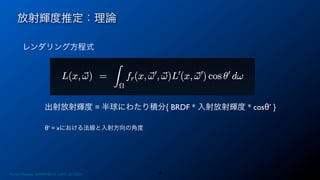
![フォトンのデータ構造
struct photon
{
float x, y, z; // 位置
float power[3]; // 出力(単位:放射束,flux,Φ)
char phi, theta; // 入射方向
short flag; // kd-treeで使う分割面(XorYorZ)
}
20Photon Mapping. RENERING1H CAMP 2013/8/24](https://image.slidesharecdn.com/photonmapping-130901115246-phpapp02/85/slide-20-320.jpg)






![[DL輪読会]NeRF: Representing Scenes as Neural Radiance Fields for View Synthesis](https://cdn.slidesharecdn.com/ss_thumbnails/nerfdlseminar1-200327021512-thumbnail.jpg?width=640&height=640&fit=bounds)









![[DL輪読会]Neural Radiance Flow for 4D View Synthesis and Video Processing (NeRF...](https://cdn.slidesharecdn.com/ss_thumbnails/20210806journalclub-210806023711-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]Convolutional Conditional Neural Processesと Neural Processes Familyの紹介](https://cdn.slidesharecdn.com/ss_thumbnails/20191220readingpaperconvcnp-191220034420-thumbnail.jpg?width=640&height=640&fit=bounds)




![[DL輪読会] Spectral Norm Regularization for Improving the Generalizability of De...](https://cdn.slidesharecdn.com/ss_thumbnails/dlhackspectralnorm1-170907072536-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]“Spatial Attention Point Network for Deep-learning-based Robust Autono...](https://cdn.slidesharecdn.com/ss_thumbnails/20210729kokiyamane-210730035349-thumbnail.jpg?width=640&height=640&fit=bounds)


























