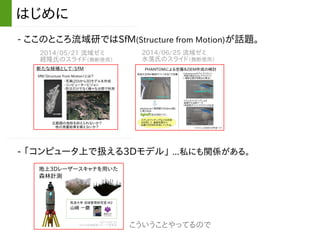
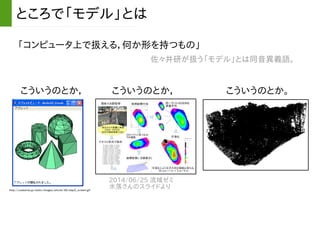
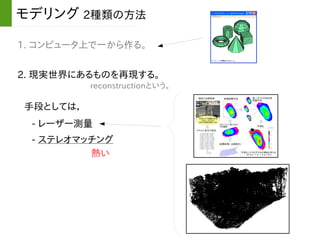
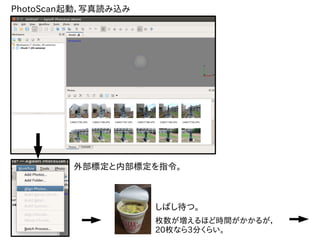
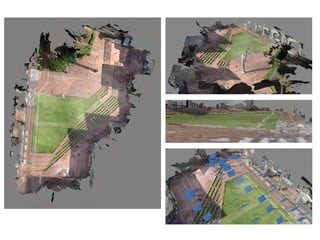
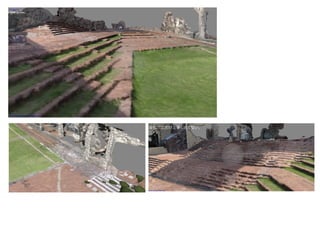
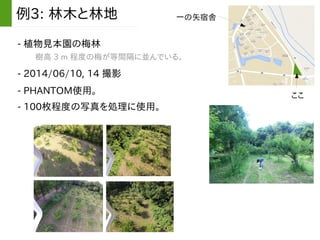
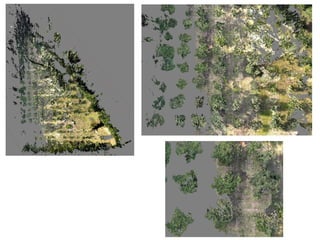
所属していた研究室のゼミで使用したスライドです。PhotoScanというSfMソフト、および、PHANTOMというドローンを使って、筑波大学内の地形図を作成しました。 このスライドを用いたプレゼンの動画をYouTubeにアップしています。 合わせてどうぞ: https://www.youtube.com/watch?v=PTuoLHZCl0k



















![SSII2020 [O3-01] Extreme 3D センシング](https://cdn.slidesharecdn.com/ss_thumbnails/200612-ssii-extreme3dsensing-print3-200608114658-thumbnail.jpg?width=640&height=640&fit=bounds)























