Downloaded 19 times

![A Typical Prolog program
Compute_length ([],0).
Compute_length ([Head|Tail], Length):Compute_length (Tail,Tail_length),
Length is Tail_length+1.
High level explanation:
The length of a list is 1 plus the length of the
tail of the list, obtained by removing the first
element of the list.
This is a declarative description of the
computation.](https://image.slidesharecdn.com/cs344-lect15-robotic-knowledge-inferencing-prolog-11feb08-140207090210-phpapp02/75/Cs344-lect15-robotic-knowledge-inferencing-prolog-11feb08-22-2048.jpg)
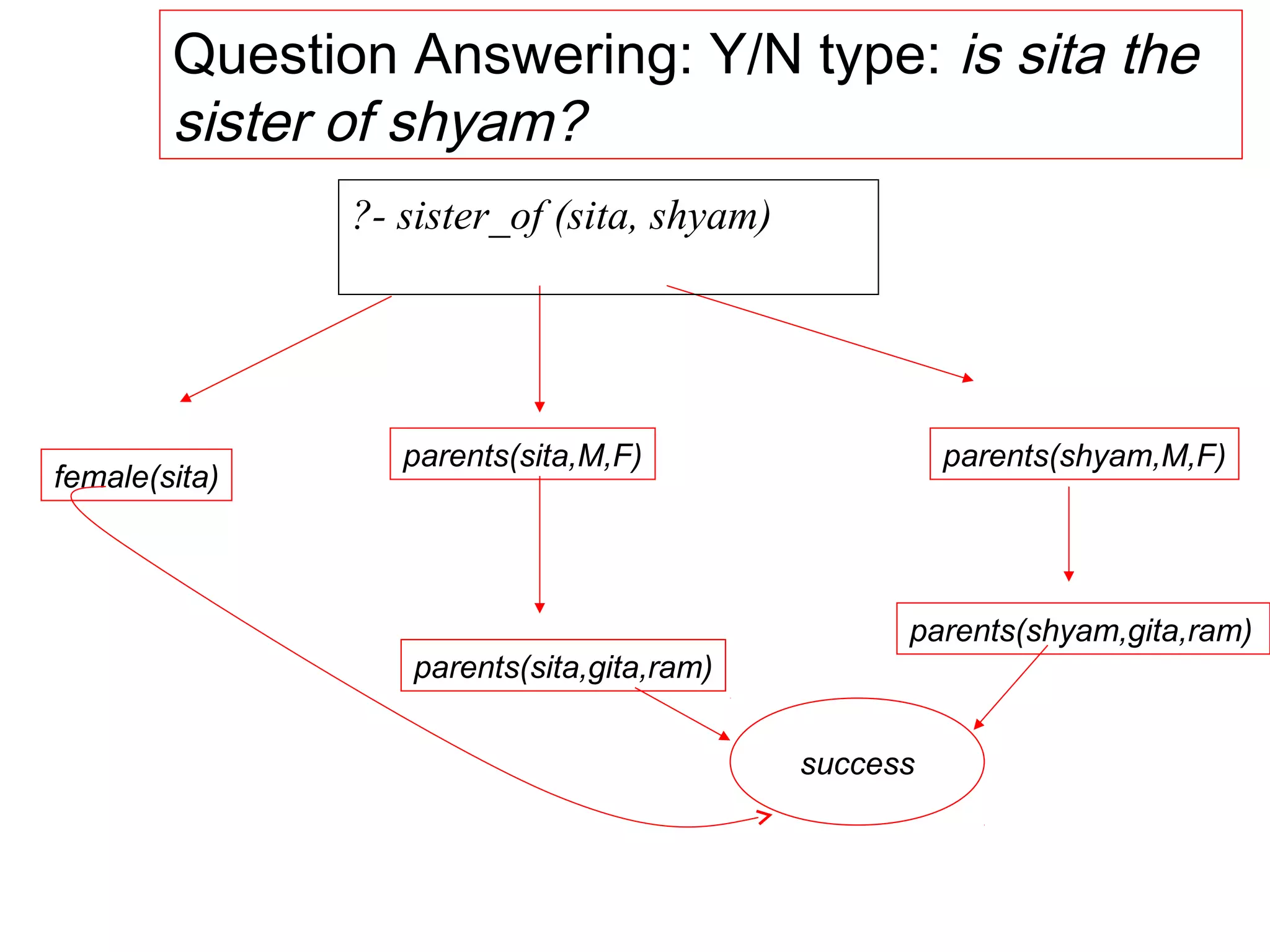
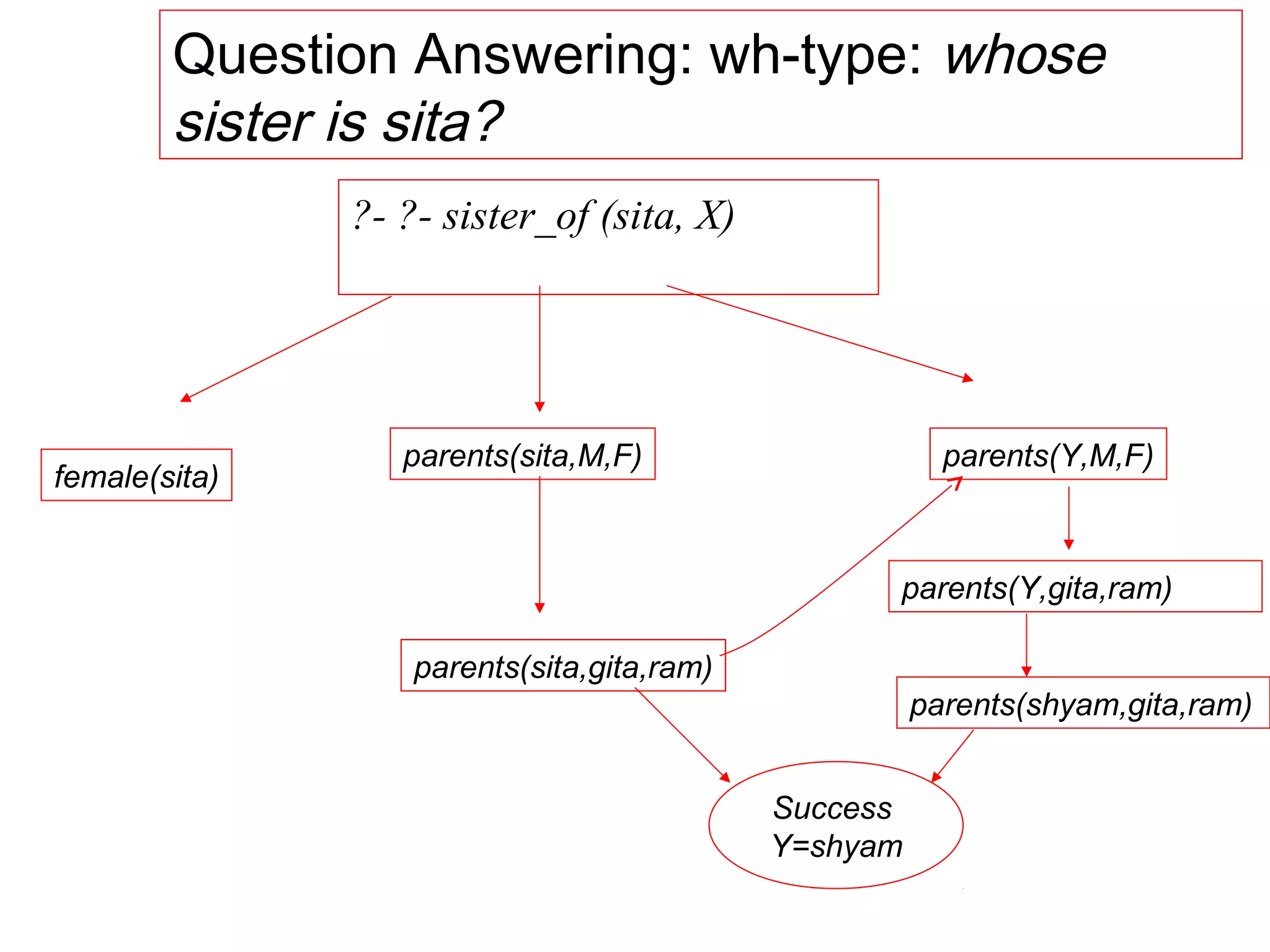

To prevent somebody from being their own sister, the rule for sister_of/2 can be modified to add the constraint that X and Y must be different individuals: sister_of(X, Y) :- female(X), X \= Y, parents(X, M, F), parents(Y, M, F). This adds the check X \= Y to ensure X and Y are not the same person before concluding they are sisters.




















































![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)











