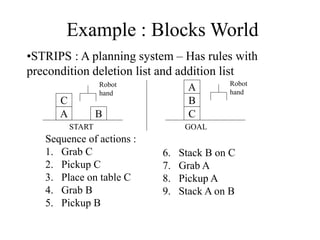
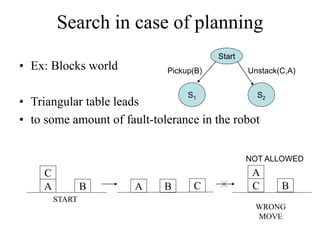
The document discusses predicate calculus and knowledge representation in artificial intelligence, focusing on resolution and inferencing techniques through a problem involving members of the Himalayan club. It explains forward and backward chaining, resolution refutation, and planning in robotics, with examples like STRIPS for task planning. The fundamental aspects of planning, including deterministic actions and the handling of constraints, are detailed alongside the application of inferencing methods such as forward and backward chaining.

![Predicate Calculus: Example
contd.
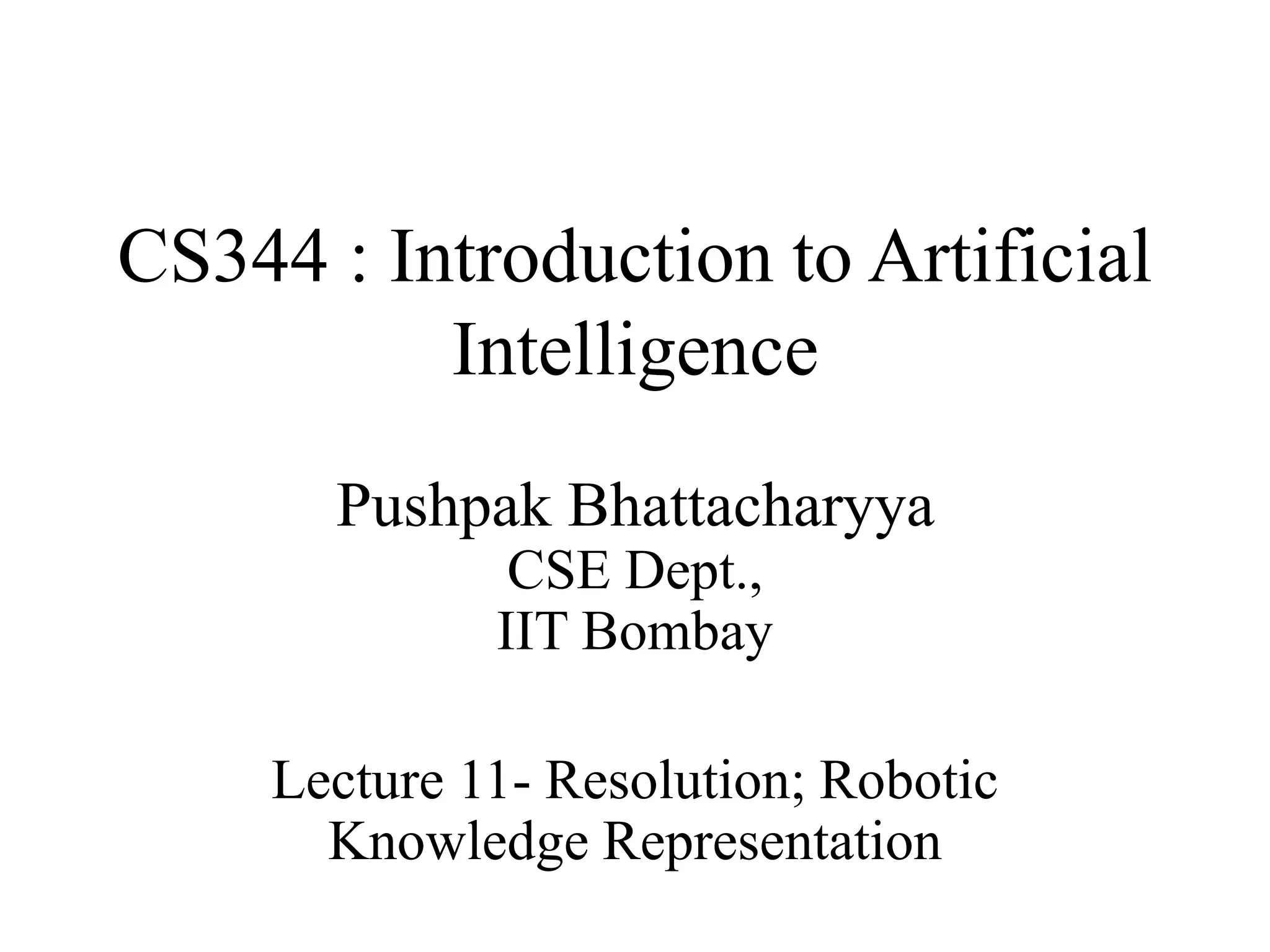
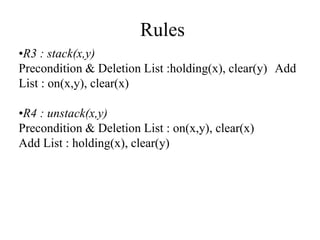
• Let mc denote mountain climber and sk denotes skier. Knowledge
representation in the given problem is as follows:
1. member(A)
2. member(B)
3. member(C)
4. ∀x[member(x) → (mc(x) ∨ sk(x))]
5. ∀x[mc(x) → ~like(x,rain)]
6. ∀x[sk(x) → like(x, snow)]
7. ∀x[like(B, x) → ~like(A, x)]
8. ∀x[~like(B, x) → like(A, x)]
9. like(A, rain)
10. like(A, snow)
11. Question: ∃x[member(x) ∧ mc(x) ∧ ~sk(x)]
• We have to infer the 11th expression from the given 10.
• Done through Resolution Refutation.](https://image.slidesharecdn.com/cs344-lect11-resolution-robotic-knowledge-representation-29jan08-240603130000-06ff2477/85/cs344-lect11-resolution-robotic-knowledge-representation-29jan08-ppt-3-320.jpg)
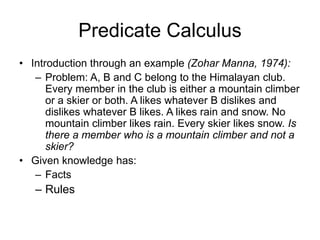
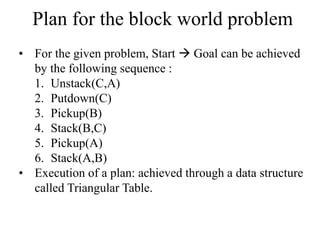
![Club example revisited
1. member(A)
2. member(B)
3. member(C)
4.
– Can be written as
–
5.
–
6.
–
7.
–
))]
(
)
(
(
)
(
[ x
sk
x
mc
x
member
x
))]
(
)
(
(
)
(
[ x
sk
x
mc
x
member
)
(
)
(
)
(
~ x
sk
x
mc
x
member
)]
,
(
)
(
[ snow
x
lk
x
sk
x
)
,
(
)
(
~ snow
x
lk
x
sk
)]
,
(
~
)
(
[ rain
x
lk
x
mc
x
)
,
(
~
)
(
~ rain
x
lk
x
mc
)]
,
(
~
)
,
(
[ x
B
lk
x
A
like
x
)
,
(
~
)
,
(
~ x
B
lk
x
A
like ](https://image.slidesharecdn.com/cs344-lect11-resolution-robotic-knowledge-representation-29jan08-240603130000-06ff2477/85/cs344-lect11-resolution-robotic-knowledge-representation-29jan08-ppt-7-320.jpg)
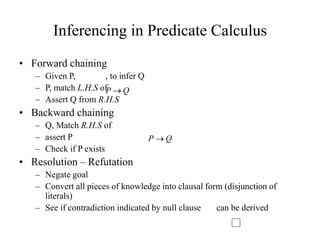
![8.
–
9.
10.
11.
– Negate–
)]
,
(
)
,
(
[~ x
B
lk
x
A
lk
x
)
,
(
)
,
( x
B
lk
x
A
lk
)
,
( rain
A
lk
)
,
( snow
A
lk
)]
(
~
)
(
)
(
[ x
sk
x
mc
x
member
x
)]
(
)
(
~
)
(
[~ x
sk
x
mc
x
member
x
](https://image.slidesharecdn.com/cs344-lect11-resolution-robotic-knowledge-representation-29jan08-240603130000-06ff2477/85/cs344-lect11-resolution-robotic-knowledge-representation-29jan08-ppt-8-320.jpg)
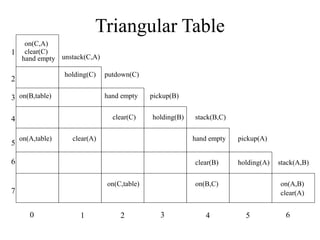
![• Now standardize the variables apart which
results in the following
1. member(A)
2. member(B)
3. member(C)
4.
5.
6.
7.
8.
9.
10.
11.
)
(
)
(
)
(
~ 1
1
1 x
sk
x
mc
x
member
)
,
(
)
(
~ 2
2 snow
x
lk
x
sk
)
,
(
~
)
(
~ 3
3 rain
x
lk
x
mc
)
,
(
~
)
,
(
~ 4
4 x
B
lk
x
A
like
)
,
(
)
,
( 5
5 x
B
lk
x
A
lk
)
,
( rain
A
lk
)
,
( snow
A
lk
)]
(
)
(
~
)
(
[~ 6
6
6 x
sk
x
mc
x
member
x
](https://image.slidesharecdn.com/cs344-lect11-resolution-robotic-knowledge-representation-29jan08-240603130000-06ff2477/85/cs344-lect11-resolution-robotic-knowledge-representation-29jan08-ppt-9-320.jpg)
![)
,
(
~
)
,
(
~ 4
4 x
B
lk
x
A
like )
,
( snow
A
lk
)
,
(
~ snow
B
lk )
,
(
)
(
~ 2
2 snow
x
lk
x
sk
)
(
)
(
)
(
~ 1
1
1 x
sk
x
mc
x
member
)
(
~ B
sk
)
(
)
(
~ B
mc
B
member )
(B
member
)
(B
mc
)]
(
)
(
~
)
(
[~ 6
6
6 x
sk
x
mc
x
member
x
)
(
)
(
~ B
sk
B
member )
(
~ B
sk
)
(
~ B
member )
(B
member
7
10
12 5
13 4
14 2
11
15
16 13
17 2](https://image.slidesharecdn.com/cs344-lect11-resolution-robotic-knowledge-representation-29jan08-240603130000-06ff2477/85/cs344-lect11-resolution-robotic-knowledge-representation-29jan08-ppt-10-320.jpg)

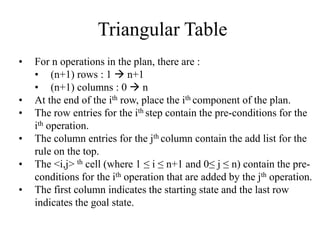
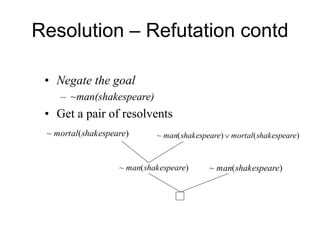
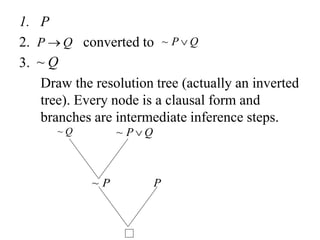
![Predicate Calculus
• Well Known Example:
– Man is mortal : rule
∀x[man(x) → mortal(x)]
– shakespeare is a man
man(shakespeare)
– To infer shakespeare is mortal
mortal(shakespeare)](https://image.slidesharecdn.com/cs344-lect11-resolution-robotic-knowledge-representation-29jan08-240603130000-06ff2477/85/cs344-lect11-resolution-robotic-knowledge-representation-29jan08-ppt-29-320.jpg)