ROBOTS I MANIPULADORS
- Manipulador i els robots:
Sòn maquines programables que poden fer tasques repetitives amb
mes rapidesa i mes precisió, reduint els costos de la fabricació.
- Robòtica:
Es el conjunt de coneixement que permeten dissenyar, realitzar i
controlar equips basats en estructures mecàniques
Poliarticulidades , amb un certa capacitat d’aprenetatge
destinats a la producció industrial i a la substitució del treball
humà en tasques diverses.
3.
Arquitectura d’un robotindustrial
• Parell de revolució: La barra unicament gira respecte l'altra
- Parell prismatic: La barra llisca respecte l'altra pero sense girar un unic moviment
-Parell cilindric: Te dos moviments independets un giratori i un lliscant.
- Parell helicoidal: Peremet el moviment de gir i de desplaçament al mateix temps, pero lligat l'un a l'altre
- Parell esferic: Permet 3 girs en 3 dimensions sense desplaçament, com una bola de un remolc.
-Parell pla: Una barrra o un membre pot moure en dues dirrecions i girar respecte de l'altre.
-Robots amb estroctura cartesiana
- Robots amb estroctura cilindrica
- Robots de estroctura polar
- Robots de estroctura angular
4.
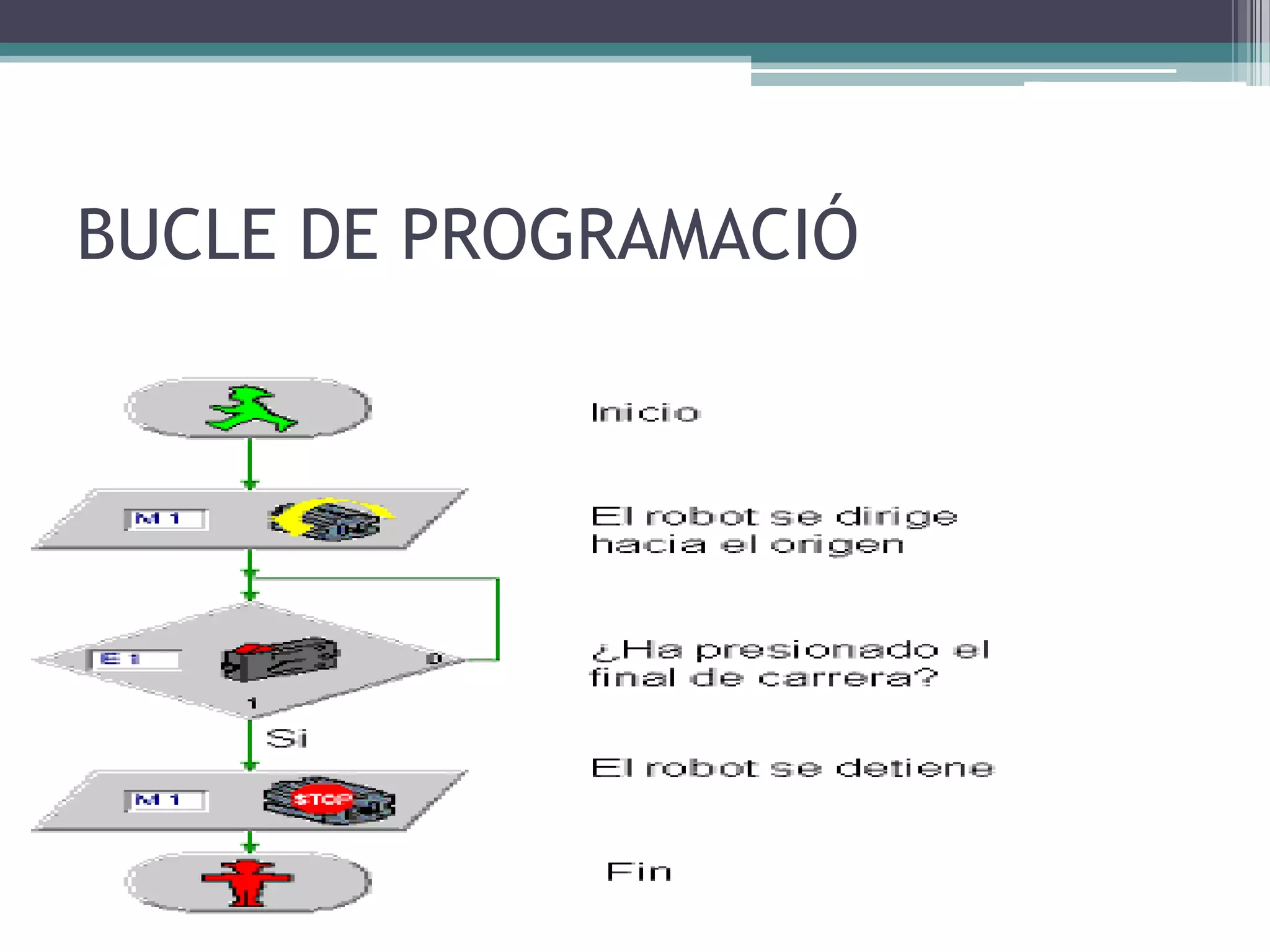
2. Control iprogramacio de robots
• - Programcio per guiatge:
- Consisterix en ensenyar el robot a fer el cami i la
sequencia d'accionant que ha de realitzar fent-li recore la
trajectoria manual emprant un termini de comandament
o be de moviment directmaent a les arituculacions del
manipulador. Es molt facil de prgoramar.
- Programacio amb llenguatge a nivell de robot:
- Consisteix a definir la sequencia de treball amb
passo de programcio en els quals indica els moviments
que ha de fer i si li informa de l'entorn ( obstacles), els
llenguatges pdes ser BASICS, C, LOGO.•ROBOTS I
MANIPULADORS
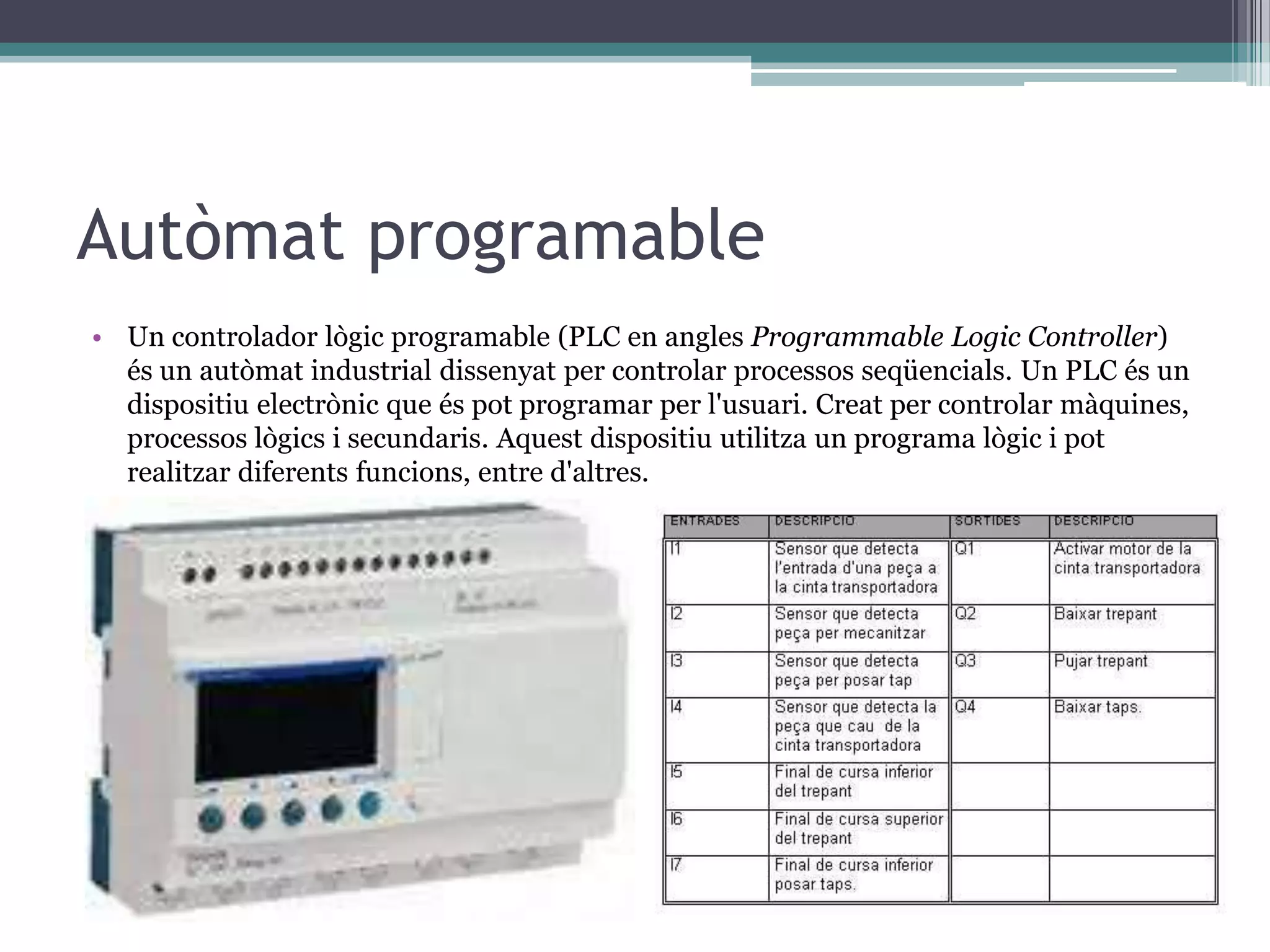
Autòmat programable
• Uncontrolador lògic programable (PLC en angles Programmable Logic Controller)
és un autòmat industrial dissenyat per controlar processos seqüencials. Un PLC és un
dispositiu electrònic que és pot programar per l'usuari. Creat per controlar màquines,
processos lògics i secundaris. Aquest dispositiu utilitza un programa lògic i pot
realitzar diferents funcions, entre d'altres.
8.
Els circuits integratsprogramables (
PIC)
• Des del punt de vista funcional, un microprocessador és un circuit integrat que
incorpora en el seu interior una unitat central de procés (CPU) i tot un conjunt
d'elements lògics que permeten enllaçar altres dispositius com a memòries i ports
d'entrada i sortida (I/O), formant un sistema complet per complir amb una aplicació
específica dins del món real. Perquè el sistema pugui realitzar la seva labor ha
d'executar pas a pas un programa que consisteix en una seqüència de nombres
binaris o instruccions, almacenandolas en un o més elements de memòria,
generalment externs al mateix. L'aplicació més important dels microprocessadors
que va canviar totalment la forma de treballar, ha estat la computadora personal o
microcomputadora.
9.
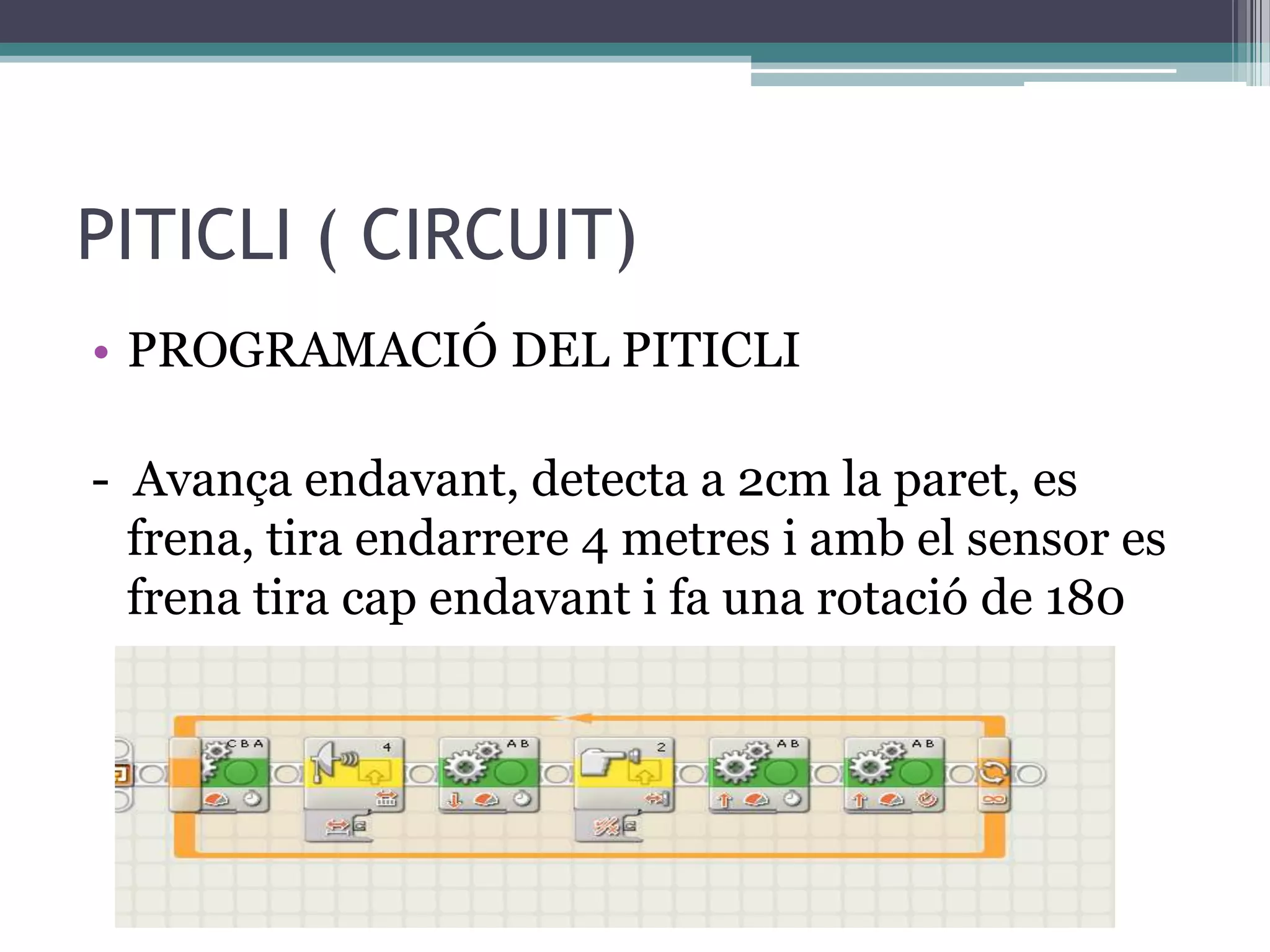
PITICLI ( CIRCUIT)
•PROGRAMACIÓ DEL PITICLI
- Avança endavant, detecta a 2cm la paret, es
frena, tira endarrere 4 metres i amb el sensor es
frena tira cap endavant i fa una rotació de 180