Downloaded 30 times

![Sample Problem 8/9
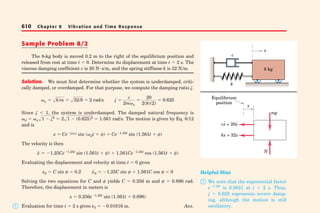
Derive the equation of motion for the homogeneous circular cylinder, which
rolls without slipping. If the cylinder mass is 50 kg, the cylinder radius 0.5 m,
the spring constant 75 N/m, and the damping coefficient 10 determine
(a) the undamped natural frequency
(b) the damping ratio
(c) the damped natural frequency
(d) the period of the damped system.
In addition, determine x as a function of time if the cylinder is released from rest
at the position x0.2 m when t 0.
Solution. We have a choice of motion variables in that either x or the angular
displacement of the cylinder may be used. Since the problem statement in-volves
x, we draw the free-body diagram for an arbitrary, positive value of x and
write the two motion equations for the cylinder as
[ΣFx m¨x] c˙x kx F m¨x
¨x r ¨.
The condition of rolling with no slip is Substitution of this condition
into the moment equation gives F Inserting this expression for the
friction force into the force equation for the x-direction yields
12
Comparing the above equation with that for the standard damped
oscillator, Eq. 8/9, allows us to state directly
(a) Ans.
2n 2
c
m
1
c
mn
10
3(50)(1)
(b) Ans.
3
3
0.0667
Hence, the damped natural frequency and the damped period are
(c) d n1 2 (1)1 (0.0667)2 0.998 rad/s
Ans.
(d) Ans.
d 2/d 2/0.998 6.30 s
From Eq. 8/12, the underdamped solution to the equation of motion is
x Cent sin (dt ) Ce(0.0667)(1)t sin (0.998t )
The velocity is ˙x 0.0667Ce0.0667t sin (0.998t )
x˙
0.998Ce0.0667t cos (0.998t )
At time t 0, x and become
x0 C sin 0.2
x˙0 0.0667C sin 0.998C cos 0
The solution to the two equations in C and gives
C 0.200 m 1.504 rad
Thus, the motion is given by
x 0.200e0.0667t sin (0.998t 1.504) m Ans.
n
2 2
3
k
m
cx˙ kx 1
2
mx¨ mx¨ or x¨ 2
3
c
m
x˙ 2
3
k
m
x 0
mx¨.
Fr 12
[ΣMG I ¨] mr2 ¨
N s/m,
Article 8/4 Vibration of Rigid Bodies 637
x
m
k r c
Helpful Hints
The angle is taken positive clock-wise
to be kinematically consistent
The friction force F may be as-sumed
in either direction. We will
find that the actual direction is to
the right for x 0 and to the left
for x 0; F 0 when x 0.
F
mg
O
N
with x.
Equilibrium
position
x
+θ
kx cx·
n 2
3
k
m 2
3
75
50 1 rad/s](https://image.slidesharecdn.com/getbebasredaman2014-141201095235-conversion-gate01/85/Get-bebas-redaman_2014-3-320.jpg)











The document describes a problem involving a damped spring-mass system. It is determined that the system is underdamped with a damping ratio of 0.625. The damped natural frequency is calculated to be 1.561 rad/s. The displacement of the mass at time t=2s is calculated to be -0.01616m.



























![[W f stoecker]_refrigeration_and_a_ir_conditioning_(book_zz.org)](https://cdn.slidesharecdn.com/ss_thumbnails/wfstoeckerrefrigerationandairconditioningbookzz-161019162540-thumbnail.jpg?width=640&height=640&fit=bounds)







































