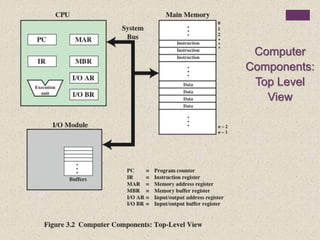
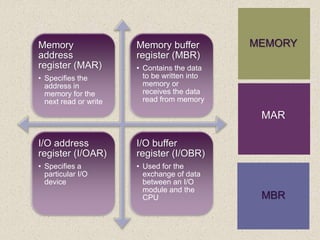
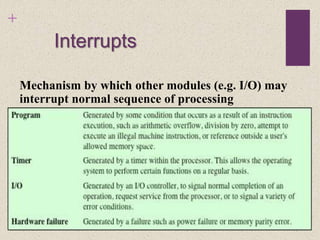
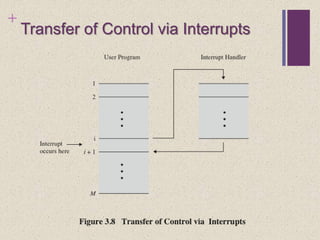
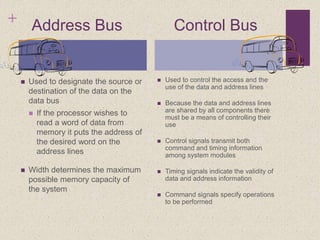
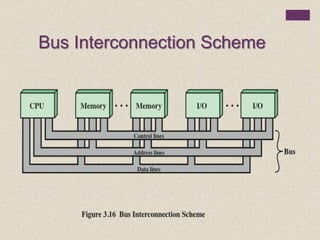
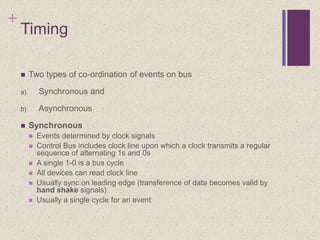
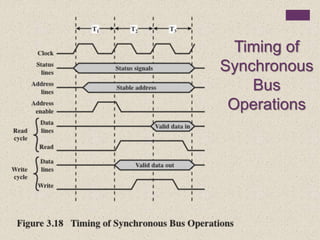
The document discusses the von Neumann architecture and basic components of a computer system. It describes how the CPU, memory, and I/O devices are interconnected via buses. The key buses are the data bus, address bus, and control bus. It explains synchronous and asynchronous timing of bus operations, with synchronous relying on a shared clock and asynchronous using handshaking signals between devices. Interrupts allow I/O devices to signal the CPU to pause normal instruction execution.





























































![谷歌留痕技术 [ 𝙩𝙤𝙥 𝟮𝟯𝟯. 𝙘 𝙤𝙢 ]](https://cdn.slidesharecdn.com/ss_thumbnails/top233-260130174328-3833018c-thumbnail.jpg?width=640&height=640&fit=bounds)











