Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Yutuki r
PDF, PPTX
23,854 views
Cassandraとh baseの比較して入門するno sql
第10回Cassandra勉強会にて発表したスライドに、勉強会後のフィードバックを反映させた物です。
Technology
◦
Read more
149
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 67
2
/ 67
3
/ 67
4
/ 67
5
/ 67
6
/ 67
7
/ 67
8
/ 67
9
/ 67
10
/ 67
11
/ 67
12
/ 67
13
/ 67
14
/ 67
15
/ 67
16
/ 67
17
/ 67
18
/ 67
19
/ 67
20
/ 67
21
/ 67
22
/ 67
23
/ 67
24
/ 67
25
/ 67
26
/ 67
27
/ 67
28
/ 67
29
/ 67
30
/ 67
31
/ 67
32
/ 67
33
/ 67
34
/ 67
35
/ 67
36
/ 67
37
/ 67
38
/ 67
39
/ 67
40
/ 67
41
/ 67
42
/ 67
43
/ 67
44
/ 67
45
/ 67
46
/ 67
47
/ 67
48
/ 67
49
/ 67
50
/ 67
51
/ 67
52
/ 67
53
/ 67
54
/ 67
55
/ 67
56
/ 67
57
/ 67
58
/ 67
59
/ 67
60
/ 67
61
/ 67
62
/ 67
63
/ 67
64
/ 67
65
/ 67
66
/ 67
67
/ 67
More Related Content
PPTX
大規模データ活用向けストレージレイヤソフトのこれまでとこれから(NTTデータ テクノロジーカンファレンス 2019 講演資料、2019/09/05)
by
NTT DATA Technology & Innovation
PDF
マイクロにしすぎた結果がこれだよ!
by
mosa siru
PPTX
トランザクションの設計と進化
by
Kumazaki Hiroki
PDF
Apache Kafka 0.11 の Exactly Once Semantics
by
Yoshiyasu SAEKI
PDF
DockerとPodmanの比較
by
Akihiro Suda
PPTX
PostgreSQLモニタリングの基本とNTTデータが追加したモニタリング新機能(Open Source Conference 2021 Online F...
by
NTT DATA Technology & Innovation
PPTX
本当は恐ろしい分散システムの話
by
Kumazaki Hiroki
PDF
PFNのML/DL基盤を支えるKubernetesにおける自動化 / DevOpsDays Tokyo 2021
by
Preferred Networks
大規模データ活用向けストレージレイヤソフトのこれまでとこれから(NTTデータ テクノロジーカンファレンス 2019 講演資料、2019/09/05)
by
NTT DATA Technology & Innovation
マイクロにしすぎた結果がこれだよ!
by
mosa siru
トランザクションの設計と進化
by
Kumazaki Hiroki
Apache Kafka 0.11 の Exactly Once Semantics
by
Yoshiyasu SAEKI
DockerとPodmanの比較
by
Akihiro Suda
PostgreSQLモニタリングの基本とNTTデータが追加したモニタリング新機能(Open Source Conference 2021 Online F...
by
NTT DATA Technology & Innovation
本当は恐ろしい分散システムの話
by
Kumazaki Hiroki
PFNのML/DL基盤を支えるKubernetesにおける自動化 / DevOpsDays Tokyo 2021
by
Preferred Networks
What's hot
PPTX
大量のデータ処理や分析に使えるOSS Apache Sparkのご紹介(Open Source Conference 2020 Online/Kyoto ...
by
NTT DATA Technology & Innovation
PDF
Apache Sparkに手を出してヤケドしないための基本 ~「Apache Spark入門より」~ (デブサミ 2016 講演資料)
by
NTT DATA OSS Professional Services
PDF
Singularityで分散深層学習
by
Hitoshi Sato
PDF
イミュータブルデータモデル(入門編)
by
Yoshitaka Kawashima
PDF
Hadoopの概念と基本的知識
by
Ken SASAKI
PDF
Kubernetes雑にまとめてみた 2020年8月版
by
VirtualTech Japan Inc.
PPTX
pg_bigmで全文検索するときに気を付けたい5つのポイント(第23回PostgreSQLアンカンファレンス@オンライン 発表資料)
by
NTT DATA Technology & Innovation
PDF
グラフデータベース Neptune 使ってみた
by
Yoshiyasu SAEKI
PDF
Linux女子部 systemd徹底入門
by
Etsuji Nakai
PPTX
大量のデータ処理や分析に使えるOSS Apache Spark入門(Open Source Conference 2021 Online/Kyoto 発表資料)
by
NTT DATA Technology & Innovation
PDF
例外設計における大罪
by
Takuto Wada
PDF
At least onceってぶっちゃけ問題の先送りだったよね #kafkajp
by
Yahoo!デベロッパーネットワーク
PDF
Apache Arrow - データ処理ツールの次世代プラットフォーム
by
Kouhei Sutou
PDF
分散学習のあれこれ~データパラレルからモデルパラレルまで~
by
Hideki Tsunashima
PDF
機械学習で泣かないためのコード設計
by
Takahiro Kubo
PPTX
モノリスからマイクロサービスへの移行 ~ストラングラーパターンの検証~(Spring Fest 2020講演資料)
by
NTT DATA Technology & Innovation
PDF
pgvectorを使ってChatGPTとPostgreSQLを連携してみよう!(PostgreSQL Conference Japan 2023 発表資料)
by
NTT DATA Technology & Innovation
PDF
ストリーム処理を支えるキューイングシステムの選び方
by
Yoshiyasu SAEKI
PDF
続・PFN のオンプレML基盤の取り組み / オンプレML基盤 on Kubernetes 〜PFN、ヤフー〜 #2
by
Preferred Networks
PDF
PGOを用いたPostgreSQL on Kubernetes入門(PostgreSQL Conference Japan 2022 発表資料)
by
NTT DATA Technology & Innovation
大量のデータ処理や分析に使えるOSS Apache Sparkのご紹介(Open Source Conference 2020 Online/Kyoto ...
by
NTT DATA Technology & Innovation
Apache Sparkに手を出してヤケドしないための基本 ~「Apache Spark入門より」~ (デブサミ 2016 講演資料)
by
NTT DATA OSS Professional Services
Singularityで分散深層学習
by
Hitoshi Sato
イミュータブルデータモデル(入門編)
by
Yoshitaka Kawashima
Hadoopの概念と基本的知識
by
Ken SASAKI
Kubernetes雑にまとめてみた 2020年8月版
by
VirtualTech Japan Inc.
pg_bigmで全文検索するときに気を付けたい5つのポイント(第23回PostgreSQLアンカンファレンス@オンライン 発表資料)
by
NTT DATA Technology & Innovation
グラフデータベース Neptune 使ってみた
by
Yoshiyasu SAEKI
Linux女子部 systemd徹底入門
by
Etsuji Nakai
大量のデータ処理や分析に使えるOSS Apache Spark入門(Open Source Conference 2021 Online/Kyoto 発表資料)
by
NTT DATA Technology & Innovation
例外設計における大罪
by
Takuto Wada
At least onceってぶっちゃけ問題の先送りだったよね #kafkajp
by
Yahoo!デベロッパーネットワーク
Apache Arrow - データ処理ツールの次世代プラットフォーム
by
Kouhei Sutou
分散学習のあれこれ~データパラレルからモデルパラレルまで~
by
Hideki Tsunashima
機械学習で泣かないためのコード設計
by
Takahiro Kubo
モノリスからマイクロサービスへの移行 ~ストラングラーパターンの検証~(Spring Fest 2020講演資料)
by
NTT DATA Technology & Innovation
pgvectorを使ってChatGPTとPostgreSQLを連携してみよう!(PostgreSQL Conference Japan 2023 発表資料)
by
NTT DATA Technology & Innovation
ストリーム処理を支えるキューイングシステムの選び方
by
Yoshiyasu SAEKI
続・PFN のオンプレML基盤の取り組み / オンプレML基盤 on Kubernetes 〜PFN、ヤフー〜 #2
by
Preferred Networks
PGOを用いたPostgreSQL on Kubernetes入門(PostgreSQL Conference Japan 2022 発表資料)
by
NTT DATA Technology & Innovation
Viewers also liked
PDF
Cassandra導入事例と現場視点での苦労したポイント cassandra summit2014jpn
by
haketa
PDF
RDB技術者のためのNoSQLガイド NoSQLの必要性と位置づけ
by
Recruit Technologies
PPT
インフラエンジニアのためのcassandra入門
by
Akihiro Kuwano
PPT
Cassandraのしくみ データの読み書き編
by
Yuki Morishita
PDF
Apache HBase 入門 (第1回)
by
tatsuya6502
PDF
スケーラブルなシステムのためのHBaseスキーマ設計 #hcj13w
by
Cloudera Japan
PDF
Apache HBase 入門 (第2回)
by
tatsuya6502
PDF
HBase活用事例 #hbase_ca
by
Cloudera Japan
PPSX
HBaseとSparkでセンサーデータを有効活用 #hbasejp
by
FwardNetwork
PPTX
HBaseサポート最前線 #hbase_ca
by
Cloudera Japan
PPTX
CAPとBASE、ACIDの呪縛
by
Kazuki Aranami
PPTX
これがCassandra
by
Takehiro Torigaki
PDF
CAPとBASEとEventually Consistent
by
Yohei Yamamoto
PDF
ビッグデータ処理データベースの全体像と使い分け
by
Recruit Technologies
PDF
Goでヤフーの分散オブジェクトストレージを作った話 Go Conference 2017 Spring
by
Yahoo!デベロッパーネットワーク
PDF
CDHの歴史とCDH5新機能概要 #at_tokuben
by
Cloudera Japan
PDF
Lars George HBase Seminar with O'REILLY Oct.12 2012
by
Cloudera Japan
PPTX
HBase スキーマ設計のポイント
by
daisuke-a-matsui
PDF
刊行記念セミナー「HBase徹底入門」
by
cyberagent
PDF
Osc2012 spring HBase Report
by
Seiichiro Ishida
Cassandra導入事例と現場視点での苦労したポイント cassandra summit2014jpn
by
haketa
RDB技術者のためのNoSQLガイド NoSQLの必要性と位置づけ
by
Recruit Technologies
インフラエンジニアのためのcassandra入門
by
Akihiro Kuwano
Cassandraのしくみ データの読み書き編
by
Yuki Morishita
Apache HBase 入門 (第1回)
by
tatsuya6502
スケーラブルなシステムのためのHBaseスキーマ設計 #hcj13w
by
Cloudera Japan
Apache HBase 入門 (第2回)
by
tatsuya6502
HBase活用事例 #hbase_ca
by
Cloudera Japan
HBaseとSparkでセンサーデータを有効活用 #hbasejp
by
FwardNetwork
HBaseサポート最前線 #hbase_ca
by
Cloudera Japan
CAPとBASE、ACIDの呪縛
by
Kazuki Aranami
これがCassandra
by
Takehiro Torigaki
CAPとBASEとEventually Consistent
by
Yohei Yamamoto
ビッグデータ処理データベースの全体像と使い分け
by
Recruit Technologies
Goでヤフーの分散オブジェクトストレージを作った話 Go Conference 2017 Spring
by
Yahoo!デベロッパーネットワーク
CDHの歴史とCDH5新機能概要 #at_tokuben
by
Cloudera Japan
Lars George HBase Seminar with O'REILLY Oct.12 2012
by
Cloudera Japan
HBase スキーマ設計のポイント
by
daisuke-a-matsui
刊行記念セミナー「HBase徹底入門」
by
cyberagent
Osc2012 spring HBase Report
by
Seiichiro Ishida
Similar to Cassandraとh baseの比較して入門するno sql
PDF
About NoSQL
by
hideaki honda
PDF
InfoTalk springbreak_2012
by
Hiroshi Bunya
PDF
NoSQLとビックデータ入門編Update版
by
Koichiro Nishijima
PPT
Cassandra(no sql)によるシステム提案と開発
by
kishimotosc
PPTX
2024年度_サイバーエージェント_新卒研修「データベースの歴史」.pptx
by
yassun7010
PDF
20120409 aws meister-reloaded-dynamo-db
by
Amazon Web Services Japan
PPT
Cassandra v0.6-siryou
by
あしたのオープンソース研究所
PPT
Devsumi2013【15-e-5】NoSQLの野心的な使い方 ~Apache Cassandra編~
by
kishimotosc
PDF
[INSIGHT OUT 2011] b21 ひとつのデータベース技術では生き残れない part2 no sql, hadoop
by
Insight Technology, Inc.
PPTX
NoSQL Bigtable and Azure Table
by
Takekazu Omi
PPTX
Okuyama説明資料 20120119 ss
by
Takahiro Iwase
PDF
[db tech showcase Tokyo 2014] L32: Apache Cassandraに注目!!(IoT, Bigdata、NoSQLのバ...
by
Insight Technology, Inc.
PDF
Info talk #36
by
Hiroshi Bunya
PDF
社会ネットワーク分析第7回
by
Satoru Mikami
PDF
Introduction to Modern Analytical DB
by
Takeshi Yamamuro
PDF
実務で役立つデータベースの活用法
by
Soudai Sone
PDF
「NOSQLの基礎知識」講義資料 第20回JDMC定例セミナー(201310)
by
CLOUDIAN KK
PDF
Nosqlの基礎知識(2013年7月講義資料)
by
CLOUDIAN KK
PDF
事例から見るNoSQLの使い方 - db tech showcase Tokyo 2015 2015/06/11
by
MapR Technologies Japan
PDF
Cassandraのトランザクションサポート化 & web2pyによるcms用プラグイン開発
by
kishimotosc
About NoSQL
by
hideaki honda
InfoTalk springbreak_2012
by
Hiroshi Bunya
NoSQLとビックデータ入門編Update版
by
Koichiro Nishijima
Cassandra(no sql)によるシステム提案と開発
by
kishimotosc
2024年度_サイバーエージェント_新卒研修「データベースの歴史」.pptx
by
yassun7010
20120409 aws meister-reloaded-dynamo-db
by
Amazon Web Services Japan
Cassandra v0.6-siryou
by
あしたのオープンソース研究所
Devsumi2013【15-e-5】NoSQLの野心的な使い方 ~Apache Cassandra編~
by
kishimotosc
[INSIGHT OUT 2011] b21 ひとつのデータベース技術では生き残れない part2 no sql, hadoop
by
Insight Technology, Inc.
NoSQL Bigtable and Azure Table
by
Takekazu Omi
Okuyama説明資料 20120119 ss
by
Takahiro Iwase
[db tech showcase Tokyo 2014] L32: Apache Cassandraに注目!!(IoT, Bigdata、NoSQLのバ...
by
Insight Technology, Inc.
Info talk #36
by
Hiroshi Bunya
社会ネットワーク分析第7回
by
Satoru Mikami
Introduction to Modern Analytical DB
by
Takeshi Yamamuro
実務で役立つデータベースの活用法
by
Soudai Sone
「NOSQLの基礎知識」講義資料 第20回JDMC定例セミナー(201310)
by
CLOUDIAN KK
Nosqlの基礎知識(2013年7月講義資料)
by
CLOUDIAN KK
事例から見るNoSQLの使い方 - db tech showcase Tokyo 2015 2015/06/11
by
MapR Technologies Japan
Cassandraのトランザクションサポート化 & web2pyによるcms用プラグイン開発
by
kishimotosc
Cassandraとh baseの比較して入門するno sql
1.
CassandraとHBaseの比較 をして入門するNoSQL
HN : 豊月(Yutuki) Twitter : @yutuki_r 1
2.
中の人。 • 本スライド:Ver1.3 • HN
: 豊月(Yutuki) • Twitter : @yutuki_r • Wiki : http://lunarium.info/arc/ • 今日のハッシュタグ : #casstudy10th • Google Group : Cassandra勉強会 2
3.
改訂履歴 • 1.1 公開 •
1.2 誤記修正 Chunk→Tablet • 1.3 内容を追記、修正しました。 – CAP定理が証明論文が公開 – Cassandraを利用したアプリ「PARTAKE」が公開 – Cassandra勉強会グループと日本Cassandraユーザ会が統合 – Cassandra0.7で実装されるのはVersionedClock – その他、わかりにくい箇所に説明追加等の修正 3
4.
AGENDA • NoSQLって何? • NoSQLとRDBの関係は? •
どうしてNoSQLが必要になったの? • Database種類多すぎ!わからないよ! • じゃどんなNoSQLが出てきたの? • どんな構造をしてるの? – HBaseについて – Cassandraについて – 障害への対応 • 結局どっちを使えばいいの? 4
5.
NoSQLって何? ABOUT NOSQL
5
6.
NoSQLとは • Not Only
SQLの略称です。 • 意訳:「SQLだけじゃないぜ!」 • 意味1:SQLを利用しないデータベースの事 • 意味2:上記の様なデータベースを積極的に使っていこう という動き、運動を指す。 6
7.
NoSQLはこんなにたくさんあります
BigTable HBase SimpleDB Dynamo (Google) (Yahoo!) (Amazon) (Amazon) ROMA Cassandra Kai CouchDB (楽天) (FaceBook) (goo) BerkeleyDB Flare MongoDB Kumofs (Oracle) (Gree) WAS TokyoTyrant Velocity Voldemort eXtremeScale (mixi) (Microsoft) (Linkdin) (IBM) 7
8.
NoSQLの特徴
ノード数に ノード数に • RDBと比べて利用目的や 素直に比 比例しない 利用範囲を絞っている 例する性能 運用コスト • RDBが搭載している機能 を省いている 伸縮自在 障害耐性 8
9.
NoSQLとRDBの関係は? DATA STORE CONCEPT
9
10.
DataStore Database
FileSystem 10
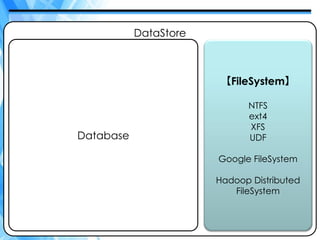
11.
DataStore
【FileSystem】 NTFS ext4 XFS Database UDF Google FileSystem Hadoop Distributed FileSystem 11
12.
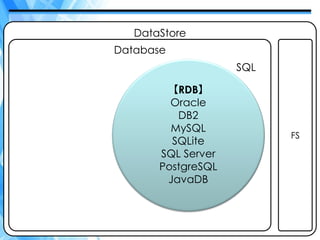
DataStore Database
SQL 【RDB】 Oracle DB2 MySQL FS SQLite SQL Server PostgreSQL JavaDB 12
13.
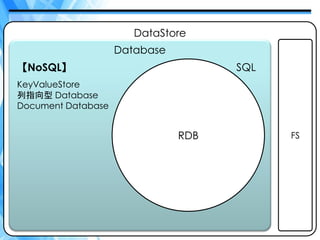
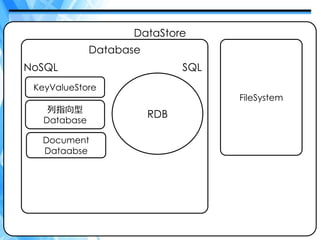
DataStore
Database 【NoSQL】 SQL KeyValueStore 列指向型 Database Document Database RDB FS 13
14.
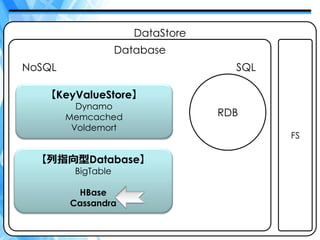
DataStore
Database NoSQL SQL 【KeyValueStore】 Dynamo Memcached RDB Voldemort FS 【列指向型Database】 BigTable HBase Cassandra 14
15.
狭義のKVS、広義のKVS • KVSの構造
Key Value 15
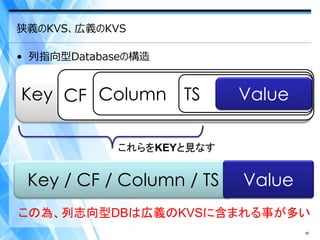
16.
狭義のKVS、広義のKVS • 列指向型Databaseの構造 Key CF
Column TS Value これらをKEYと見なす Key / CF / Column / TS Value この為、列志向型DBは広義のKVSに含まれる事が多い 16
17.
DataStore
Database NoSQL SQL KeyValueStore FileSystem 列指向型 RDB Database Document Dataabse 17
18.
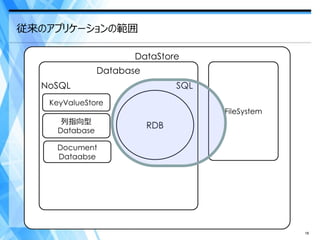
従来のアプリケーションの範囲
18
19.
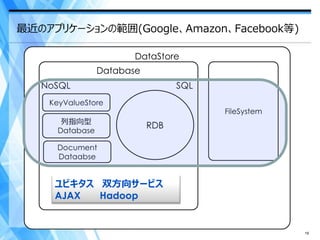
最近のアプリケーションの範囲(Google、Amazon、Facebook等)
ユビキタス 双方向サービス AJAX Hadoop 19
20.
どうしてNoSQLが必要になったの? EVOLUTION OF WEB
20
21.
Web1.0 と Web2.0 ■Web1.0
• 基本的に情報は一方通行 • 通信回数は基本的に一回 • 更新頻度が低い静的HTML ■Web2.0 • 双方向通信 • 複数通信~常時通信 AJAX通信 • コンテンツはDB上、毎度読み出して動的表示 • ユーザ毎に違うページ 21
22.
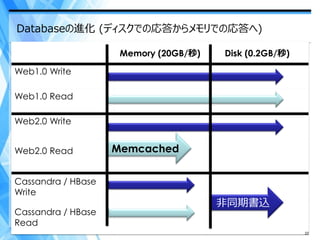
Databaseの進化 (ディスクでの応答からメモリでの応答へ)
Memory (20GB/秒) Disk (0.2GB/秒) Web1.0 Write Web1.0 Read Web2.0 Write Web2.0 Read Memcached Cassandra / HBase Write 非同期書込 Cassandra / HBase Read 22
23.
Database種類多すぎ!わからないよ! BREWER'S CAP THEOREM
23
24.
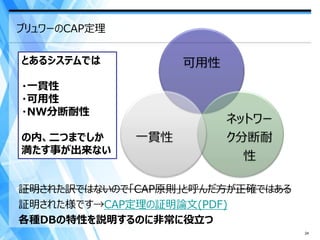
ブリュワーのCAP定理 とあるシステムでは
可用性 ・一貫性 ・可用性 ・NW分断耐性 ネットワー の内、二つまでしか 一貫性 ク分断耐 満たす事が出来ない 性 証明された訳ではないので「CAP原則」と呼んだ方が正確ではある 証明された様です→CAP定理の証明論文(PDF) 各種DBの特性を説明するのに非常に役立つ 24
25.
CAP定理 一貫性 (Consistency) •
一貫性がある – ZEROか100か – YESかNOか – 白か黒か – 生か死か • 重要なのは、「何も出来ない状態」も一貫性が担保された状態である事 • 中途半端な状態が存在しない 25
26.
CAP定理 可用性 (Availability) •
文字通り、そのサービスが利用出来る事 • そのサービスが動いていた所で利用出来なければ意味がない • Webで言えば、混雑していてもキチンと応答が返ってくる事 – ■残念な例 – iPhone4発売時のSoftBankとか – W杯の時のTwitterとか – ラピュタが放映してる時の2chとか – ■良い例 – Amazon、Google、Facebookとか – 新商品発売時のAppleStoreとか – 最近のmixiとか – モバゲーとか 26
27.
CAP定理 分割耐性(Partition Tolerance) •
CAP定理の中でも一番難しいポイント • 「全面的なネットワーク障害以外のネットワーク障害が発生しても、システム 全体が間違った結果を返さない」 • よくこのPの部分を間違って「分散しやすい」と理解している人がいますが、そ れは誤解であり違います 27
28.
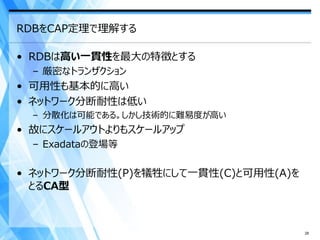
RDBをCAP定理で理解する • RDBは高い一貫性を最大の特徴とする
– 厳密なトランザクション • 可用性も基本的に高い • ネットワーク分断耐性は低い – 分散化は可能である。しかし技術的に難易度が高い • 故にスケールアウトよりもスケールアップ – Exadataの登場等 • ネットワーク分断耐性(P)を犠牲にして一貫性(C)と可用性(A)を とるCA型 28
29.
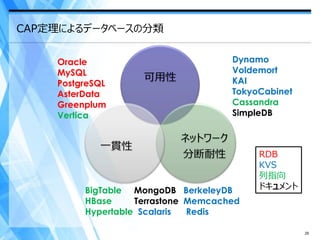
CAP定理によるデータベースの分類
Oracle Dynamo MySQL Voldemort 可用性 KAI PostgreSQL AsterData TokyoCabinet Greenplum Cassandra Vertica SimpleDB ネットワーク 一貫性 分断耐性 RDB KVS 列指向 BigTable MongoDB BerkeleyDB ドキュメント HBase Terrastone Memcached Hypertable Scalaris Redis 29
30.
じゃどんなNoSQLが出てきたの? BIRTH OF NOSQL
30
31.
Google BigTable • Googleの持つ分散ファイルシステム
「Google FileSystem(GFS)」の 上で動作する列指向DB • 2006年に論文が公開される • GFSは大きめのファイルを保存する のが得意 • GFSが苦手な小型ファイル(データ) を取り扱う為に開発される 31
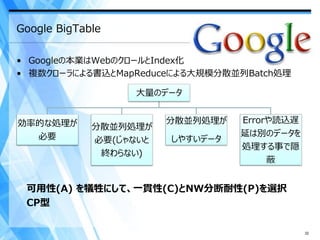
32.
Google BigTable • Googleの本業はWebのクロールとIndex化 •
複数クローラによる書込とMapReduceによる大規模分散並列Batch処理 大量のデータ 効率的な処理が 分散並列処理が Errorや読込遅 分散並列処理が 必要 延は別のデータを 必要(じゃないと しやすいデータ 処理する事で隠 終わらない) 蔽 可用性(A) を犠牲にして、一貫性(C)とNW分断耐性(P)を選択 CP型 32
33.
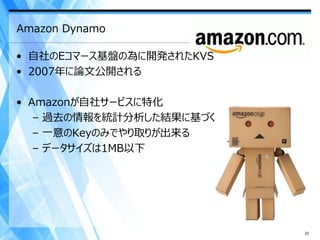
Amazon Dynamo • 自社のEコマース基盤の為に開発されたKVS •
2007年に論文公開される • Amazonが自社サービスに特化 – 過去の情報を統計分析した結果に基づく – 一意のKeyのみでやり取りが出来る – データサイズは1MB以下 33
34.
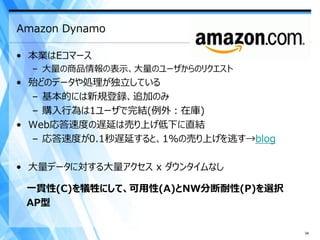
Amazon Dynamo • 本業はEコマース
– 大量の商品情報の表示、大量のユーザからのリクエスト • 殆どのデータや処理が独立している – 基本的には新規登録、追加のみ – 購入行為は1ユーザで完結(例外:在庫) • Web応答速度の遅延は売り上げ低下に直結 – 応答速度が0.1秒遅延すると、1%の売り上げを逃す→blog • 大量データに対する大量アクセス x ダウンタイムなし 一貫性(C)を犠牲にして、可用性(A)とNW分断耐性(P)を選択 AP型 34
35.
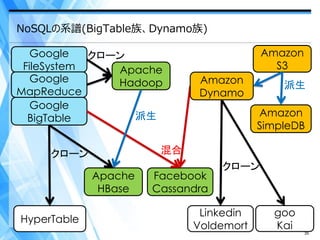
NoSQLの系譜(BigTable族、Dynamo族)
Google クローン Amazon FileSystem Apache S3 Google Hadoop Amazon 派生 MapReduce Dynamo Google BigTable 派生 Amazon SimpleDB クローン 混合 クローン Apache Facebook HBase Cassandra Linkedin goo HyperTable Voldemort Kai 35
36.
どんな構造をしてるの? ARCHITECTURE
36
37.
基本的な構造
BigTable HBase Cassandra Dynamo CAP CP CP AP AP データ 分散方法 シャーディング コンシステントハッシング法 データモデル 列志向 KeyValue MemTable ストレージ MySQL CommitLog / SSTable 37
38.
Architecture.1 SHARDING
38
39.
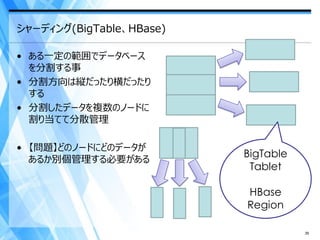
シャーディング(BigTable、HBase) • ある一定の範囲でデータベース
を分割する事 • 分割方向は縦だったり横だったり する • 分割したデータを複数のノードに 割り当てて分散管理 • 【問題】どのノードにどのデータが BigTable あるか別個管理する必要がある Tablet HBase Region 39
40.
Architecture.2 CONSISTENT HASHING
40
41.
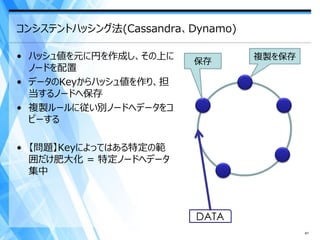
コンシステントハッシング法(Cassandra、Dynamo) • ハッシュ値を元に円を作成し、その上に
複製を保存 保存 ノードを配置 • データのKeyからハッシュ値を作り、担 当するノードへ保存 • 複製ルールに従い別ノードへデータをコ ピーする • 【問題】Keyによってはある特定の範 囲だけ肥大化 = 特定ノードへデータ 集中 DATA 41
42.
Architecture.3 COMMITLOG / MEMTABLE
/ SSTABLE 42
43.
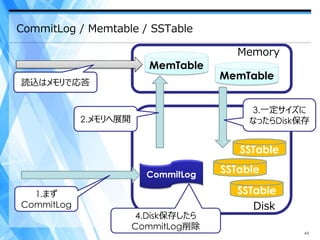
CommitLog / Memtable
/ SSTable Memory MemTable MemTable 読込はメモリで応答 3.一定サイズに 2.メモリへ展開 なったらDisk保存 SSTable CommitLog SSTable 1.まず SSTable CommitLog Disk 4.Disk保存したら CommitLog削除 43
44.
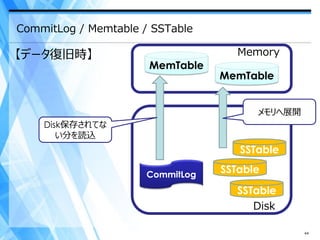
CommitLog / Memtable
/ SSTable 【データ復旧時】 Memory MemTable MemTable メモリへ展開 Disk保存されてな い分を読込 SSTable CommitLog SSTable SSTable Disk 44
45.
もっとHBaseについて詳しく! ARCHITECTURE OF HBASE
45
46.
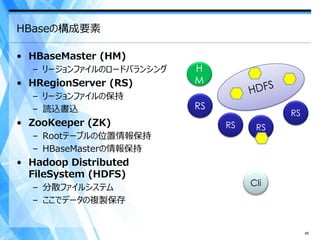
HBaseの構成要素 • HBaseMaster (HM)
– リージョンファイルのロードバランシング H • HRegionServer (RS) M – リージョンファイルの保持 – 読込書込 RS RS • ZooKeeper (ZK) RS RS – Rootテーブルの位置情報保持 – HBaseMasterの情報保持 • Hadoop Distributed FileSystem (HDFS) – 分散ファイルシステム Cli – ここでデータの複製保存 46
47.
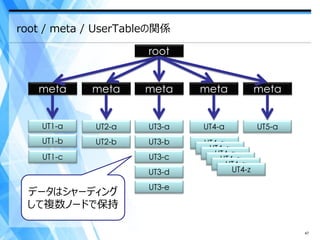
root / meta
/ UserTableの関係 root meta meta meta meta meta UT1-a UT2-a UT3-a UT4-a UT5-a UT1-b UT2-b UT3-b UT4-a UT4-a UT1-c UT3-c UT4-a UT4-a UT4-a UT3-d UT4-z UT3-e データはシャーディング して複数ノードで保持 47
48.
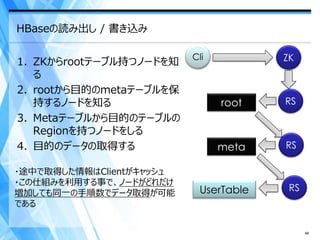
HBaseの読み出し / 書き込み
Cli ZK 1. ZKからrootテーブル持つノードを知 る 2. rootから目的のmetaテーブルを保 持するノードを知る root RS 3. Metaテーブルから目的のテーブルの Regionを持つノードをしる 4. 目的のデータの取得する meta RS ・途中で取得した情報はClientがキャッシュ ・この仕組みを利用する事で、ノードがどれだけ UserTable RS 増加しても同一の手順数でデータ取得が可能 である 48
49.
もっとCassandraについて詳しく! ARCHITECTURE OF CASSANDRA
49
50.
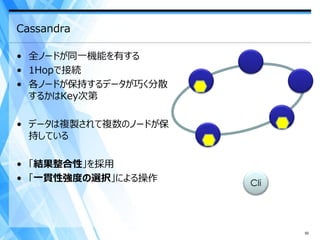
Cassandra • 全ノードが同一機能を有する • 1Hopで接続 •
各ノードが保持するデータが巧く分散 するかはKey次第 • データは複製されて複数のノードが保 持している • 「結果整合性」を採用 • 「一貫性強度の選択」による操作 Cli 50
51.
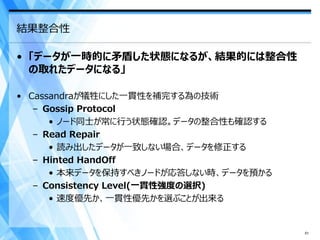
結果整合性 • 「データが一時的に矛盾した状態になるが、結果的には整合性
の取れたデータになる」 • Cassandraが犠牲にした一貫性を補完する為の技術 – Gossip Protocol • ノード同士が常に行う状態確認。データの整合性も確認する – Read Repair • 読み出したデータが一致しない場合、データを修正する – Hinted HandOff • 本来データを保持すべきノードが応答しない時、データを預かる – Consistency Level(一貫性強度の選択) • 速度優先か、一貫性優先かを選ぶことが出来る 51
52.
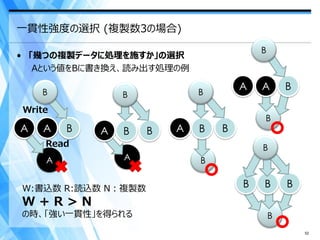
一貫性強度の選択 (複製数3の場合)
B • 「幾つの複製データに処理を施すか」の選択 Aという値をBに書き換え、読み出す処理の例 B B A A B B Write B A A B A B B A B B Read B A A B W:書込数 R:読込数 N:複製数 B B B W+R>N の時、「強い一貫性」を得られる B 52
53.
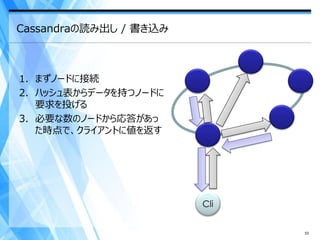
Cassandraの読み出し / 書き込み 1.
まずノードに接続 2. ハッシュ表からデータを持つノードに 要求を投げる 3. 必要な数のノードから応答があっ た時点で、クライアントに値を返す Cli 53
54.
CassandraとHBaseとの違いをもっと分かり易く! THE DIFFERENCE BETWEEN CASSANDRA
AND HBASE 54
55.
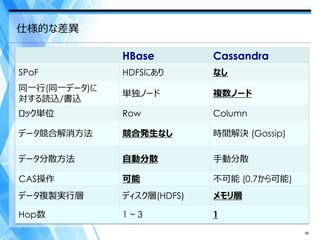
仕様的な差異
HBase Cassandra SPoF HDFSにあり なし 同一行(同一データ)に 単独ノード 複数ノード 対する読込/書込 ロック単位 Row Column データ競合解消方法 競合発生なし 時間解決 (Gossip) データ分散方法 自動分散 手動分散 CAS操作 可能 不可能 (0.7から可能) データ複製実行層 ディスク層(HDFS) メモリ層 Hop数 1~3 1 55
56.
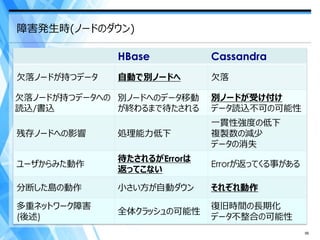
障害発生時(ノードのダウン)
HBase Cassandra 欠落ノードが持つデータ 自動で別ノードへ 欠落 欠落ノードが持つデータへの 別ノードへのデータ移動 別ノードが受け付け 読込/書込 が終わるまで待たされる データ読込不可の可能性 一貫性強度の低下 残存ノードへの影響 処理能力低下 複製数の減少 データの消失 待たされるがErrorは ユーザからみた動作 Errorが返ってくる事がある 返ってこない 分断した島の動作 小さい方が自動ダウン それぞれ動作 多重ネットワーク障害 復旧時間の長期化 全体クラッシュの可能性 (後述) データ不整合の可能性 56
57.
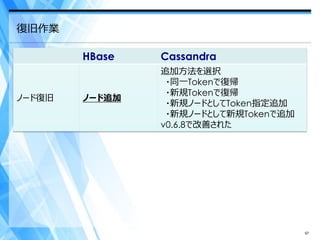
復旧作業
HBase Cassandra 追加方法を選択 ・同一Tokenで復帰 ・新規Tokenで復帰 ノード復旧 ノード追加 ・新規ノードとしてToken指定追加 ・新規ノードとして新規Tokenで追加 v0.6.8で改善された 57
58.
多重ネットワーク障害が起きるとどうなるの? THE HAZARD
58
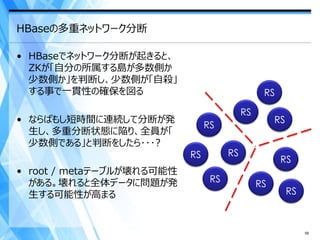
59.
HBaseの多重ネットワーク分断 • HBaseでネットワーク分断が起きると、
ZKが「自分の所属する島が多数側か 少数側か」を判断し、少数側が「自殺」 する事で一貫性の確保を図る RS RS • ならばもし短時間に連続して分断が発 RS RS 生し、多重分断状態に陥り、全員が「 少数側である」と判断をしたら・・・? RS RS RS • root / metaテーブルが壊れる可能性 がある。壊れると全体データに問題が発 RS RS 生する可能性が高まる RS 59
60.
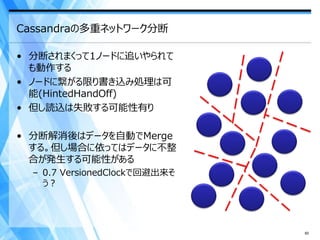
Cassandraの多重ネットワーク分断 • 分断されまくって1ノードに追いやられて
も動作する • ノードに繋がる限り書き込み処理は可 能(HintedHandOff) • 但し読込は失敗する可能性有り • 分断解消後はデータを自動でMerge する。但し場合に依ってはデータに不整 合が発生する可能性がある – 0.7 VersionedClockで回避出来そ う? 60
61.
HBaseとCassandra、結局どっちを使えばいいの? RIGHT OPERATION IN
THE RIGHT DATABASE 61
62.
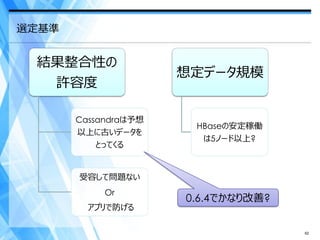
選定基準 結果整合性の
想定データ規模 許容度 Cassandraは予想 HBaseの安定稼働 以上に古いデータを は5ノード以上? とってくる 受容して問題ない Or 0.6.4でかなり改善? アプリで防げる 62
63.
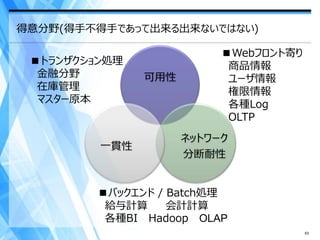
得意分野(得手不得手であって出来る出来ないではない)
■Webフロント寄り ■トランザクション処理 商品情報 金融分野 可用性 ユーザ情報 在庫管理 権限情報 マスター原本 各種Log OLTP ネットワーク 一貫性 分断耐性 ■バックエンド / Batch処理 給与計算 会計計算 各種BI Hadoop OLAP 63
64.
だからこそ敢えて Cassandra、HBaseを利用したアプリケーションを考えている場合、 まず本番の前に調査として
「最も苦手とする機能を作ってみる」 事を提案します。 • 回避策を発見出来ます。 • 地雷原を発見出来ます。 • 事前に地雷を踏みまくれ! • 技術力もつきます。 • 勉強会での発表のネタが出来ます。 64
65.
苦手機能の例 • @mayahjp氏作成イベント参加者管理アプリ • 「PARTAKE」 •
要求される機能はどれもCassandraが苦手とする機能 – 一定数で締め切らなければならない – 参加者数の正確なカウント – 登録順序の管理 • この辺りを詳しく知りたい方は@mayahjp氏のスライド 「CassandraでWebAppを」を見てみてください。 65
66.
以上。 ご静聴閲覧有り難う御座いました
66
67.
Powered by &
Special Thanks! • @mayahjp氏 • @ashato氏 • @2t3氏 • 日本Cassandraユーザー会 • Hadoopソースコードリーディング 67
Download































































![[INSIGHT OUT 2011] b21 ひとつのデータベース技術では生き残れない part2 no sql, hadoop](https://cdn.slidesharecdn.com/ss_thumbnails/insightout2011b21part2nosqlhadoop-111114020909-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)


![[db tech showcase Tokyo 2014] L32: Apache Cassandraに注目!!(IoT, Bigdata、NoSQLのバ...](https://cdn.slidesharecdn.com/ss_thumbnails/dbtstokyo2014l32datastaxapachecassandraiotbigdatanosql-141120022255-conversion-gate02-thumbnail.jpg?width=640&height=640&fit=bounds)







