Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Satoru Mikami
4,902 views
社会ネットワーク分析第7回
オープンソースで学ぶ社会ネットワーク分析の第7回まとめ 社会ネットワーク分析勉強会の資料
Technology
◦
Read more
1
Save
Share
Embed
Embed presentation
Download
Downloaded 17 times
1
/ 33
2
/ 33
3
/ 33
4
/ 33
5
/ 33
6
/ 33
7
/ 33
8
/ 33
9
/ 33
10
/ 33
11
/ 33
12
/ 33
13
/ 33
14
/ 33
15
/ 33
16
/ 33
17
/ 33
18
/ 33
19
/ 33
20
/ 33
21
/ 33
22
/ 33
23
/ 33
24
/ 33
25
/ 33
26
/ 33
27
/ 33
28
/ 33
29
/ 33
30
/ 33
31
/ 33
32
/ 33
33
/ 33
More Related Content
PDF
Hadoop入門
by
Preferred Networks
PPTX
分散グラフデータベース DataStax Enterprise Graph
by
Yuki Morishita
PDF
Drill超簡単チューニング
by
MapR Technologies Japan
PDF
ICDE 2015 Study (R24-4, R27-3)
by
Masafumi Oyamada
PDF
PCCC20 東京大学情報基盤センター「BDECシステムとh3-Open-BDEC」
by
PC Cluster Consortium
PDF
Hadoopとその周辺の紹介
by
Shinya Okano
PDF
DataStax EnterpriseでApache Tinkerpop入門
by
Yuki Morishita
PDF
Asakusaではじめるhadoop sparkプログラミング
by
Tadatoshi Sekiguchi
Hadoop入門
by
Preferred Networks
分散グラフデータベース DataStax Enterprise Graph
by
Yuki Morishita
Drill超簡単チューニング
by
MapR Technologies Japan
ICDE 2015 Study (R24-4, R27-3)
by
Masafumi Oyamada
PCCC20 東京大学情報基盤センター「BDECシステムとh3-Open-BDEC」
by
PC Cluster Consortium
Hadoopとその周辺の紹介
by
Shinya Okano
DataStax EnterpriseでApache Tinkerpop入門
by
Yuki Morishita
Asakusaではじめるhadoop sparkプログラミング
by
Tadatoshi Sekiguchi
What's hot
PDF
データベースシステム論12 - 問い合わせ処理と最適化
by
Shohei Yokoyama
PPTX
DataStax Enterpriseによる大規模グラフ解析
by
Yuki Morishita
PDF
並列データベースシステムの概念と原理
by
Makoto Yui
PDF
Apache tinkerpopとグラフデータベースの世界
by
Yuki Morishita
PPT
分散KVSのデータモデリング
by
Tatsunori Matoba
PDF
OSC2012 OSC.DB Hadoop
by
Shinichi YAMASHITA
PDF
Hadoop - OSC2010 Tokyo/Spring
by
Shinichi YAMASHITA
PPTX
Dat009 クラウドでビック
by
Tech Summit 2016
PPTX
Hadoop
by
Atsushi Shimura
PDF
Cassandraのトランザクションサポート化 & web2pyによるcms用プラグイン開発
by
kishimotosc
PDF
[db tech showcase Tokyo 2017] B35: 地図用データを高速処理!オープンソースGPUデータベースMapDの魅力に迫る!!by...
by
Insight Technology, Inc.
データベースシステム論12 - 問い合わせ処理と最適化
by
Shohei Yokoyama
DataStax Enterpriseによる大規模グラフ解析
by
Yuki Morishita
並列データベースシステムの概念と原理
by
Makoto Yui
Apache tinkerpopとグラフデータベースの世界
by
Yuki Morishita
分散KVSのデータモデリング
by
Tatsunori Matoba
OSC2012 OSC.DB Hadoop
by
Shinichi YAMASHITA
Hadoop - OSC2010 Tokyo/Spring
by
Shinichi YAMASHITA
Dat009 クラウドでビック
by
Tech Summit 2016
Hadoop
by
Atsushi Shimura
Cassandraのトランザクションサポート化 & web2pyによるcms用プラグイン開発
by
kishimotosc
[db tech showcase Tokyo 2017] B35: 地図用データを高速処理!オープンソースGPUデータベースMapDの魅力に迫る!!by...
by
Insight Technology, Inc.
Viewers also liked
PDF
The Art of Social Media Analysis with Twitter & Python
by
Krishna Sankar
PDF
Pythonによるソーシャルデータ分析―わたしはこうやって修士号を取得しました―
by
Hisao Soyama
PPTX
R seminar on igraph
by
Kazuhiro Takemoto
PDF
Sna book chapter_5
by
Kenji Koshikawa
PDF
『オープンソースで学ぶ社会ネットワーク分析』1章 イントロダクション
by
Hisao Soyama
PDF
社会ネットワーク勉強会第3回発表
by
shigex Kondou
PPTX
Itエンジニアのための自然言語処理入門
by
Satoru Mikami
PPTX
PythonとRによるデータ分析環境の構築と機械学習によるデータ認識
by
Katsuhiro Morishita
PDF
複雑ネットワーク勉強会 二部グラフの基礎と応用 20120208
by
Hiroko Onari
PDF
2章グラフ理論スピード入門
by
Teruo Kawasaki
PPTX
非エンジニアに人工知能に 興味を持ってもらう話
by
Satoru Mikami
PPTX
ゲームマップのためのグラフAPIの設計
by
隆行 神戸
PDF
2部グラフとソーシャルネットワーク
by
Hiroko Onari
PPT
Mongodb
by
Satoru Mikami
KEY
Atndapi
by
Satoru Mikami
PDF
自然言語処理分野の最前線(ステアラボ人工知能シンポジウム2017)
by
STAIR Lab, Chiba Institute of Technology
PPTX
Sna4
by
Yudai Kato
PDF
Social network analysis for startups ch6
by
Hiroko Onari
PDF
大学生のTwitter利用に関する定量分析―利用目的とサービス設計の関係―
by
Hisao Soyama
PDF
バイラルメディアの可視化
by
Satoru Mikami
The Art of Social Media Analysis with Twitter & Python
by
Krishna Sankar
Pythonによるソーシャルデータ分析―わたしはこうやって修士号を取得しました―
by
Hisao Soyama
R seminar on igraph
by
Kazuhiro Takemoto
Sna book chapter_5
by
Kenji Koshikawa
『オープンソースで学ぶ社会ネットワーク分析』1章 イントロダクション
by
Hisao Soyama
社会ネットワーク勉強会第3回発表
by
shigex Kondou
Itエンジニアのための自然言語処理入門
by
Satoru Mikami
PythonとRによるデータ分析環境の構築と機械学習によるデータ認識
by
Katsuhiro Morishita
複雑ネットワーク勉強会 二部グラフの基礎と応用 20120208
by
Hiroko Onari
2章グラフ理論スピード入門
by
Teruo Kawasaki
非エンジニアに人工知能に 興味を持ってもらう話
by
Satoru Mikami
ゲームマップのためのグラフAPIの設計
by
隆行 神戸
2部グラフとソーシャルネットワーク
by
Hiroko Onari
Mongodb
by
Satoru Mikami
Atndapi
by
Satoru Mikami
自然言語処理分野の最前線(ステアラボ人工知能シンポジウム2017)
by
STAIR Lab, Chiba Institute of Technology
Sna4
by
Yudai Kato
Social network analysis for startups ch6
by
Hiroko Onari
大学生のTwitter利用に関する定量分析―利用目的とサービス設計の関係―
by
Hisao Soyama
バイラルメディアの可視化
by
Satoru Mikami
Similar to 社会ネットワーク分析第7回
PDF
Cassandraとh baseの比較して入門するno sql
by
Yutuki r
PDF
OSC2012 Tokyo/Spring - Hadoop入門
by
Shinichi YAMASHITA
PDF
40分でわかるHadoop徹底入門 (Cloudera World Tokyo 2014 講演資料)
by
hamaken
PDF
Code Anything
by
Yoshitaka Kawashima
PPTX
ビッグデータ活用支援フォーラム
by
Recruit Technologies
PDF
NOSQLの基礎知識(講義資料)
by
CLOUDIAN KK
PDF
セマンテックウェブとRDFDB
by
Hirosuke Asano
PPTX
WebDB Forum 2012 基調講演資料
by
Recruit Technologies
PDF
リレーショナルデータベースとの上手な付き合い方 long version
by
Mikiya Okuno
PDF
NoSQLとビックデータ入門編Update版
by
Koichiro Nishijima
PDF
20120831 mongoid
by
Takeshi AKIMA
PDF
About NoSQL
by
hideaki honda
PDF
Osc2012 spring HBase Report
by
Seiichiro Ishida
PDF
Scalaプログラミング・マニアックス
by
Tomoharu ASAMI
PDF
Data-Intensive Text Processing with MapReduce(Ch1,Ch2)
by
Sho Shimauchi
PDF
Object-Funcational Analysis and design
by
Tomoharu ASAMI
PDF
Heroku Postgres
by
Salesforce Developers Japan
PDF
Heroku Postgres
by
Ayumu Aizawa
PDF
Hadoop上の多種多様な処理でPigの活きる道 (Hadoop Conferecne Japan 2013 Winter)
by
NTT DATA OSS Professional Services
PDF
Data-Intensive Text Processing with MapReduce ch4
by
Sho Shimauchi
Cassandraとh baseの比較して入門するno sql
by
Yutuki r
OSC2012 Tokyo/Spring - Hadoop入門
by
Shinichi YAMASHITA
40分でわかるHadoop徹底入門 (Cloudera World Tokyo 2014 講演資料)
by
hamaken
Code Anything
by
Yoshitaka Kawashima
ビッグデータ活用支援フォーラム
by
Recruit Technologies
NOSQLの基礎知識(講義資料)
by
CLOUDIAN KK
セマンテックウェブとRDFDB
by
Hirosuke Asano
WebDB Forum 2012 基調講演資料
by
Recruit Technologies
リレーショナルデータベースとの上手な付き合い方 long version
by
Mikiya Okuno
NoSQLとビックデータ入門編Update版
by
Koichiro Nishijima
20120831 mongoid
by
Takeshi AKIMA
About NoSQL
by
hideaki honda
Osc2012 spring HBase Report
by
Seiichiro Ishida
Scalaプログラミング・マニアックス
by
Tomoharu ASAMI
Data-Intensive Text Processing with MapReduce(Ch1,Ch2)
by
Sho Shimauchi
Object-Funcational Analysis and design
by
Tomoharu ASAMI
Heroku Postgres
by
Salesforce Developers Japan
Heroku Postgres
by
Ayumu Aizawa
Hadoop上の多種多様な処理でPigの活きる道 (Hadoop Conferecne Japan 2013 Winter)
by
NTT DATA OSS Professional Services
Data-Intensive Text Processing with MapReduce ch4
by
Sho Shimauchi
Recently uploaded
PPTX
ddevについて .
by
iPride Co., Ltd.
PDF
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
PDF
さくらインターネットの今 法林リージョン:さくらのAIとか GPUとかイベントとか 〜2026年もバク進します!〜
by
法林浩之
PDF
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版
by
sorabatake
PDF
Drupal Recipes 解説 .
by
iPride Co., Ltd.
PDF
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
PDF
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
PDF
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
ddevについて .
by
iPride Co., Ltd.
第21回 Gen AI 勉強会「NotebookLMで60ページ超の スライドを作成してみた」
by
嶋 是一 (Yoshikazu SHIMA)
さくらインターネットの今 法林リージョン:さくらのAIとか GPUとかイベントとか 〜2026年もバク進します!〜
by
法林浩之
2025→2026宙畑ゆく年くる年レポート_100社を超える企業アンケート総まとめ!!_企業まとめ_1229_3版
by
sorabatake
Drupal Recipes 解説 .
by
iPride Co., Ltd.
100年後の知財業界-生成AIスライドアドリブプレゼン イーパテントYouTube配信
by
e-Patent Co., Ltd.
Reiwa 7 IT Strategist Afternoon I Question-1 3C Analysis
by
akipii ogaoga
Reiwa 7 IT Strategist Afternoon I Question-1 Ansoff's Growth Vector
by
akipii ogaoga
Starlink Direct-to-Cell (D2C) 技術の概要と将来の展望
by
CRI Japan, Inc.
社会ネットワーク分析第7回
1.
社会ネットワーク分析勉強会 その7
三上 悟 = @saicologic 12年9月20日木曜日
2.
現実のグラフデータ
現実のデータはメモリーの中に格納できない 例えば 接続されている1000ノードのグラフ 属性の部分を無視しても100MBのメモリを使う 12年9月20日木曜日
3.
現実のグラフデータ
Twitterで取得できるサンプルストリーム 1日に1200万ツイート 平均的なツイート= 1KB 1ノード1ツイートとして 1,200万 × 1KB = 1.2GBくらい 12年9月20日木曜日
4.
現実のグラフデータ 12年9月20日木曜日
5.
記憶域
容量 計算機 頂点数 小規模データ メモリー 数GB 1台 数千∼数万 メモリー/ 中規模データ 数TB 1台∼数台 数百万∼数千万 ディスク 大規模データ ディスク 数PB 数台∼数万台 億∼兆 12年9月20日木曜日
6.
スモールデータ
EdgeList(*.edge) .net(*.net) GML(*.gml) GraphML(*.graphml) その他のXMLフォーマット(*.xml) hファイル(*.h) 12年9月20日木曜日
7.
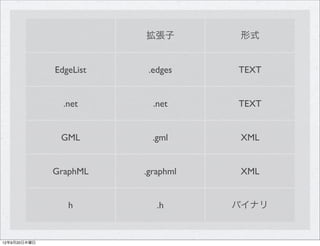
拡張子
形式 EdgeList .edges TEXT .net .net TEXT GML .gml XML GraphML .graphml XML h .h バイナリ 12年9月20日木曜日
8.
中規模データ
ディスクに格納するサイズのデータのこと 主にRDBMSやNoSQLなどのデータベース製品を使う 12年9月20日木曜日
9.
スキーマ 12年9月20日木曜日
10.
カーソル
テーブルを探索するためのデータベースオブジェクト 直接データを取得するのではなく、ポインタ情報のみ を渡す。これをリザルトセットと呼ぶ 必要なときにポインタ情報から実際のデータを取得す る。 12年9月20日木曜日
11.
トランザクション
ノードの追加や削除などの一連の処理の一体として実 行を保証する仕組みのこと 操作途中にエラーが起きればロールバックして、処理 をなかったことにすることができる。 一連の操作が完了し、コミット命令を発行したときに 初めてディスクにデータが書き込まれる。 12年9月20日木曜日
12.
名前
一意にグラフが識別できる名前をつけよう 名前を一度Base64でエンコードして格納(おすすめはし ない) base64.encodestring(name).replace('n', '') pythonのuuid()を使うと良い思います。 12年9月20日木曜日
13.
属性
ノードはオブジェクト エッジはオブジェクトの辞書 オブジェクトの属性はJSONにシリアライズして格納 12年9月20日木曜日
14.
クラス
SqlGraph add_node(node, attr_dict, cursor) add_edge(fromnode, tonode, attr_dict, cursor) removed_node(node, cursor) remove_edge(fromnode, tonode, cursor) get_node_data(node, cursor) get_edge_data(fromnode, tonode, cursor) from_nx(G) to_nx 12年9月20日木曜日
15.
関数とデコレータ
Decoratorパターン 関数定義の直前に@関数名を指定することで、その関 数を別の関数でラップすることができる。主な用途と して、データベースの接続処理(cursored) 1.カーソルの 取得(@cursored) 2. クエリーの実行(add_edge関数など) 3.カーソルの終了(@cursored) 12年9月20日木曜日
16.
関数とデコレータ
@cursored def add_node(self, node, attr_dict=None, cursor=None): 1.カーソルの取得(@cursored) 2. クエリーの実行(add_edge関数など) 3. コミット or ロールバック(@cursord) 4.カーソルの終了(@cursored) 12年9月20日木曜日
17.
アダプタ
NetworkXを操作するためのアダプタ関数を 用意しましょう。 from_nx(G) to_nx(G) 12年9月20日木曜日
18.
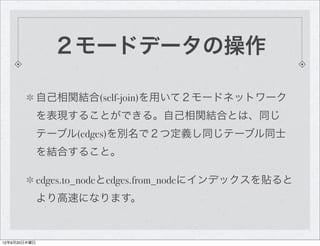
2モードデータの操作
自己相関結合(self-join)を用いて2モードネットワーク を表現することができる。自己相関結合とは、同じ テーブル(edges)を別名で2つ定義し同じテーブル同士 を結合すること。 edges.to_nodeとedges.from_nodeにインデックスを貼ると より高速になります。 12年9月20日木曜日
19.
ソーシャルデータのビックデータ
バズワード ビックデータ クラウドコンピューティング => 人間の行動パターンの巨大な収集メカニズムに対応す るための存在 例えば、Twitter内のメッセージのトレンドが知りたい 12年9月20日木曜日
20.
NoSQL
OSS DB種別 ライセンス元 言語 BigTable x 列 Google HBase o 列 ASF JAVA MongoDB o ドキュメント 10gen C++ CouchDB o ドキュメント ASF Erlang Neo Neo4j o グラフ JAVA Technology 12年9月20日木曜日
21.
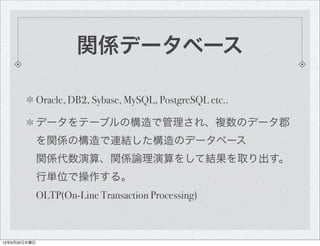
関係データベース
Oracle, DB2, Sybase, MySQL, PostgreSQL etc.. データをテーブルの構造で管理され、複数のデータ郡 を関係の構造で連結した構造のデータベース 関係代数演算、関係論理演算をして結果を取り出す。 行単位で操作する。 OLTP(On-Line Transaction Processing) 12年9月20日木曜日
22.
列指向データベース
BigTable, HBase 列のデータをひとまとめにして効率的に扱えるように 設計されたデータベース。大量の集計処理に向いてい る OLAP(OnLine Analytical Processing)向き 12年9月20日木曜日
23.
ドキュメントデータベース
MongoDB, CouchDB etc.. オブジェクトデータをひとまとめに格納したデータ ベース。主にJSONを主なフォーマットとして格納 階層的な構造のデータに向いている。 12年9月20日木曜日
24.
グラフデータベース
Neo4j, OrientDB, Titan etc.. グラフ(点と頂点)構造を格納するの適した設計の データベース。 2ホップ(友達の友達)以上のデータ探索が得意。 集合演算が苦手 12年9月20日木曜日
25.
実際のデータ構造
Tweetのデータ構造はJSONで取得できる。 RDBMSはスキーマを強制する。 NoSQLはデータ構造に非常に寛大である。 JSON, CSV, XMLなど構造化されたテキストが操作しや すいように設計されている。 12年9月20日木曜日
26.
実際のデータ構造
RDBMS 1. データ構造を学び、それに合うスキーマを設計する。 2. ストリームを読み込む。すべてのレコードについて、次のことを行う。 1. レコードをパースする。 2. レコードのフィールドをINSERTクエリーに変換する。 3. クエリーを実行し、一意制約違反を処理する。 4. オプションでほかの表をアップデートする。 NoSQLデータベース 1. ストリームを読む。 2. ファイルにレコードを書き込む。 12年9月20日木曜日
27.
RDBMSよりNoSQLの良いところ
スキーマレスなのであとで最初の設計に縛られない データ構造。複雑なデータ構造に対応。柔軟性があ る。 水平分割しやすいので、スケールしやすい (トランザクションの考えが異なるので、良い面ばか りでもない。詳しくはBASE, CAP定理を参照) 12年9月20日木曜日
28.
実際のビックデータ
分散コンピューティング 複数の計算ノードから構成 個々のノードは操作対象の一部の計算を受け取り計算 結果を返す。 計算結果を結合して、次の計算を行う。 12年9月20日木曜日
29.
Amazon S3
S3(Simple Storage Service) オブジェクトストア オブジェクトは巨大なディスク、イメージファイル や、一部の計算ファイル、ソースコードなどなんにで も見れる。 HTTPを介してアクセス HDFSとしても利用できる。 12年9月20日木曜日
30.
Apache Hadoop
分散ストレージ、分散処理の基礎を提供するJAVAソフ トウェフレームワーク HDFS(分散ファイルシステム)の上に、Map/Reduce計 算フレームワークを用いて大規模計算を行う 12年9月20日木曜日
31.
Map Reduce
Googleが開発 MapステップとReduceステップで構成された計算フ レームワーク 関数型プログラミングのMap/Reduceに似ている。 主に、Hadoopがサポートしている。最近ではMongoDB, Riak, CoucbDBも 12年9月20日木曜日
32.
Apache Hive
Apache Hiveはデータの集計、クエリ、および分析を提 供するため、Hadoopの上に構築されたデータ·ウェア ハウス·インフラストラクチャ。 SQL Likeの言語でデータを取り出すことができる。 同じソフトウェアにPigがある。 2モードグラフも簡単に書ける。なによりもRDBMSに 収まり切らない、遥かに巨大に対しても計算できる。 12年9月20日木曜日
33.
SQLは依然として我らが友
分散NoSQLデータベースは重量級 計算結果をRDBMSにおいて、それをSQLで取得するの がお手軽。 12年9月20日木曜日
Download















































![[db tech showcase Tokyo 2017] B35: 地図用データを高速処理!オープンソースGPUデータベースMapDの魅力に迫る!!by...](https://cdn.slidesharecdn.com/ss_thumbnails/b35-170912021017-thumbnail.jpg?width=640&height=640&fit=bounds)
















































