Downloaded 231 times



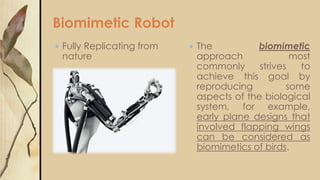














This document summarizes a seminar on biomimetic robots. It begins by defining biomimetic, bio-inspired, and bionic robots. Biomimetic robots fully replicate aspects of biology, while bio-inspired robots take ideas from nature without full replication. Bionic robots integrate electronics into living organisms. The document then discusses examples throughout history of biomimicry in technology. A robotic lobster from the 1970s is presented as one of the earliest true biomimetic robots. The document concludes by outlining current and potential applications of biomimetic robots in areas like defense, entertainment, rescue operations, and industry.