Download as PDF, PPTX








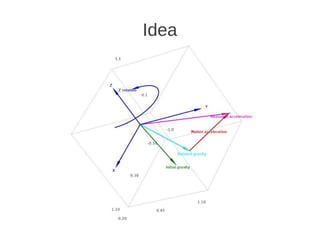







This document discusses using accelerometer and gyroscope sensor fusion to improve motion control. It begins by reviewing a previous presentation on using only an accelerometer for motion recognition. It then describes how each sensor - accelerometer, gyroscope, and compass - measures motion differently, with strengths and weaknesses. The main idea is to use a gyroscope to compensate for the gravity component detected by the accelerometer, allowing separation of gravity from motion acceleration. This allows more accurate motion recognition compared to using just acceleration. Implementation examples and conclusions are provided on potential applications and approaches to sensor fusion.