Download to read offline


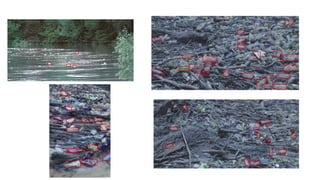
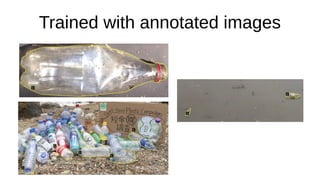
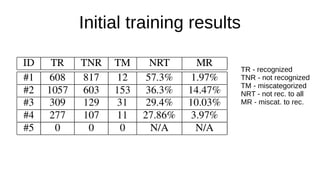

This document summarizes research on developing an early warning system to detect floating plastic waste in rivers. It notes that 50-70% of solid pollution in rivers is plastic and describes testing a motion detection camera system that had low selectivity and many false alarms. The researchers then used a Faster R-CNN deep learning model with image augmentation to achieve better results, but false negatives and some false positives remained due to poor image quality. While not suitable for exact counts, the system provides an effective early warning of plastic pollution in rivers.


















![EDAI_Sem_2_End_Sem_Reviewvxvcvxcvxc[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/edaisem2endsemreview1-250629165410-5255e29b-thumbnail.jpg?width=640&height=640&fit=bounds)