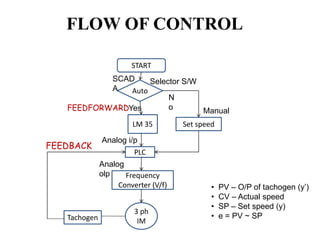
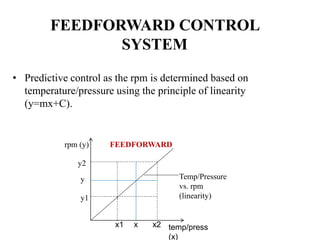
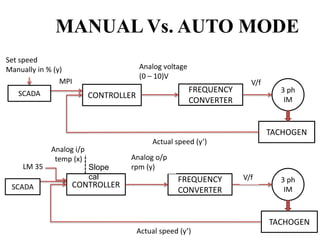
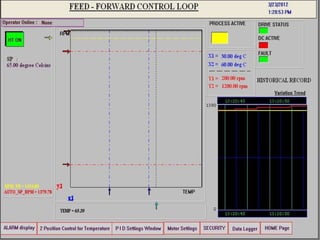
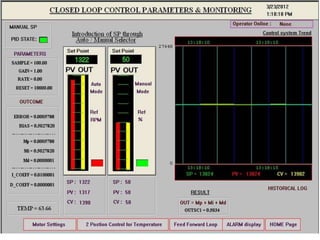
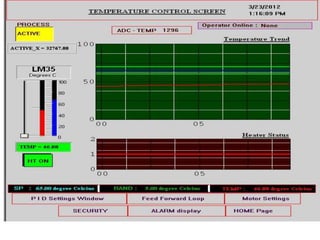
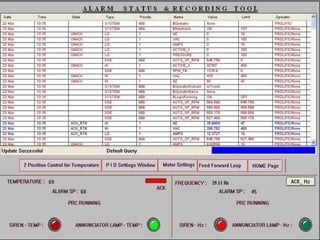
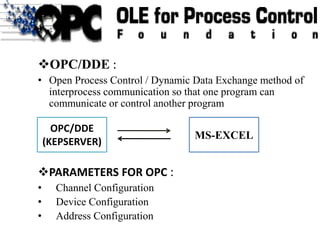
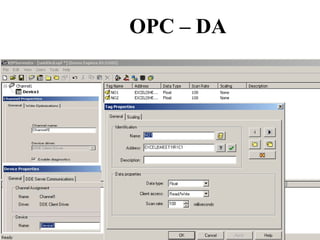
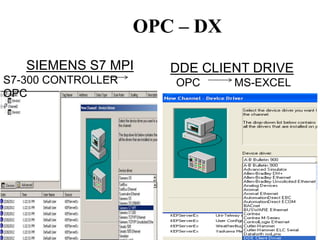
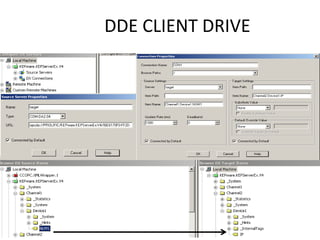
This document describes the development of a dynamic control system for industrial applications using a Siemens S7-300 PLC and various sensors. The system uses two-position control, feedforward control based on linear relationships between process variables, and feedback control using a PID algorithm. It allows both manual and automatic control modes. Data is exchanged between the PLC and SCADA software using OPC/DDE communication.
![• Variable speed is achieved using VFD that
generates variable frequency supply with constant
voltage to frequency ratio.[Performance range :
0.12 – 250KW]
MICROMASTER 440](https://image.slidesharecdn.com/4b232ed2-94a2-4608-9a3b-f212adccaeb2-161111051931/85/BATCH15-8-320.jpg)








![5. feedback control[1]](https://cdn.slidesharecdn.com/ss_thumbnails/5-feedbackcontrol1-110603210035-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)






































