Downloaded 19 times


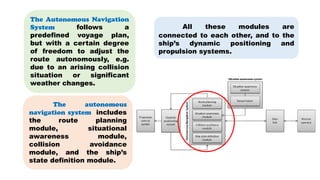
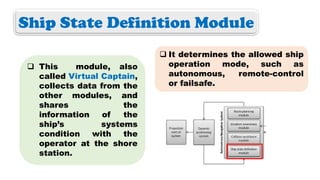
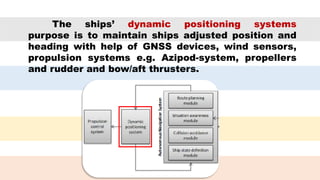
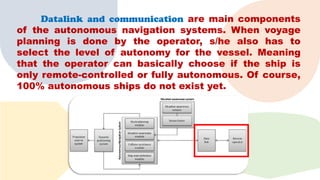


The autonomous navigation system includes four main modules: route planning, situational awareness, collision avoidance, and ship state definition. The route planning module imports routes from land and maps dynamic obstacles using sensors. The situational awareness module fuses sensor data to extract information on the ship's surroundings. The collision avoidance module is responsible for safe navigation by deviating from the planned route if risks are detected. The ship state definition module collects data from the other modules and determines the ship's allowed operation mode. All modules are connected to each other and to the ship's propulsion and positioning systems to enable autonomous or remote-controlled navigation.



















![Smart accident detector and intimator [autosaved]](https://cdn.slidesharecdn.com/ss_thumbnails/smartaccidentdetectorandintimatorautosaved-180331150920-thumbnail.jpg?width=640&height=640&fit=bounds)



































































