Download to read offline







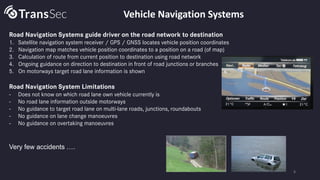







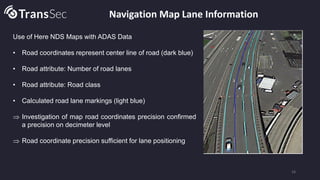

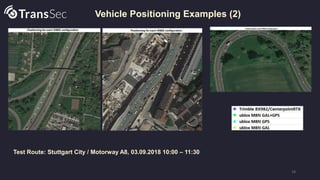
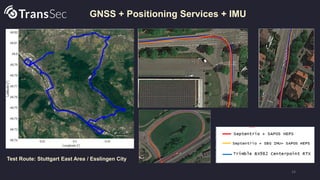



The document discusses the development of autonomous systems for secure road transport of dangerous goods, emphasizing vehicle positioning, movement monitoring, and emergency maneuvering to prevent misuse. It outlines specific objectives, including precise navigation and communication security, while identifying relevant use cases in various urban environments. The ongoing work aims to improve vehicle positioning accuracy using GNSS and local dynamic maps, with preliminary results indicating progress in reliable lane detection and positioning technology.











































































![5G Explained! A High Level Overview [Introduction]](https://cdn.slidesharecdn.com/ss_thumbnails/5gexplainedahighleveloverview-260119165306-cc137a3e-thumbnail.jpg?width=640&height=640&fit=bounds)











