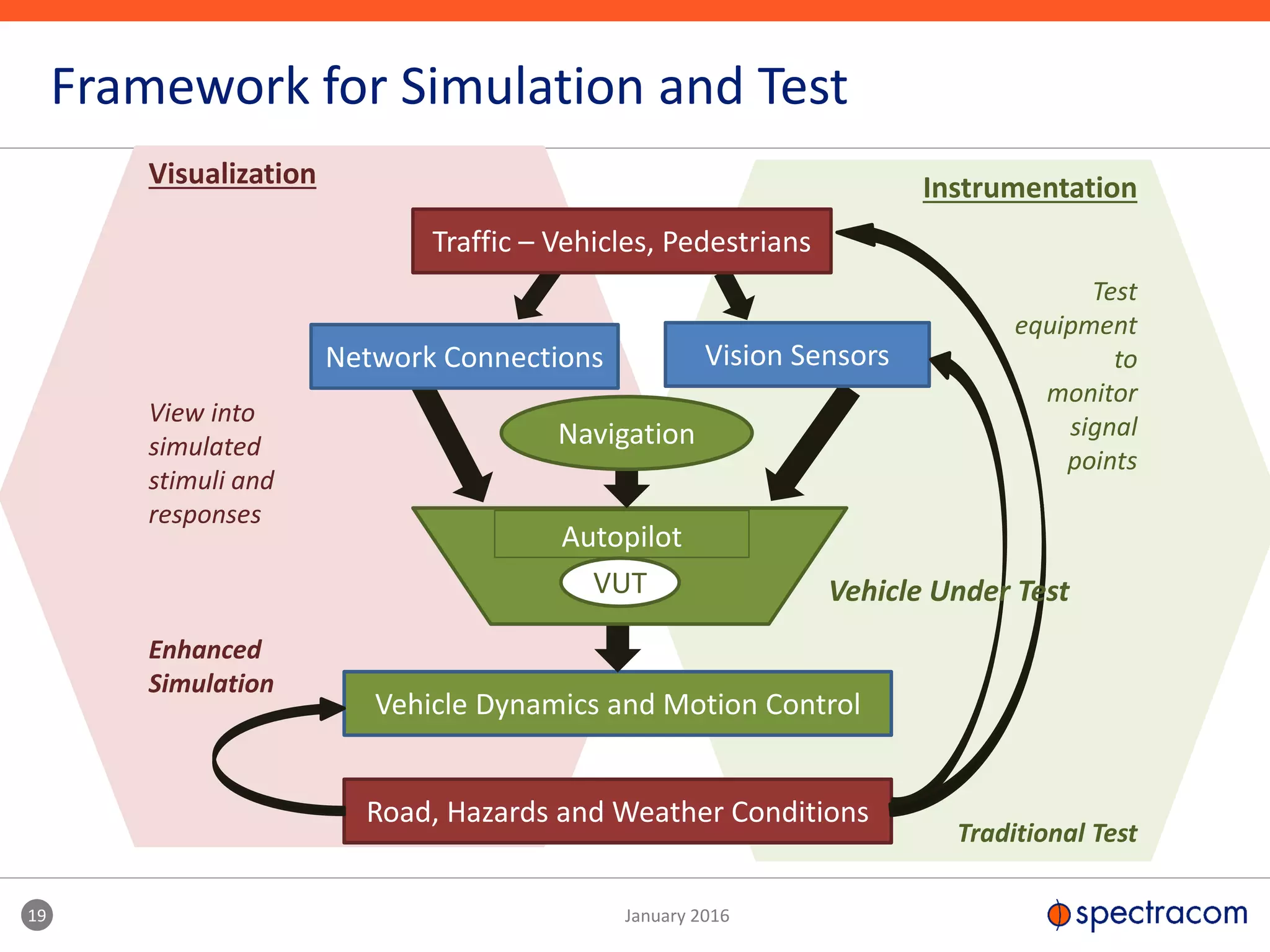
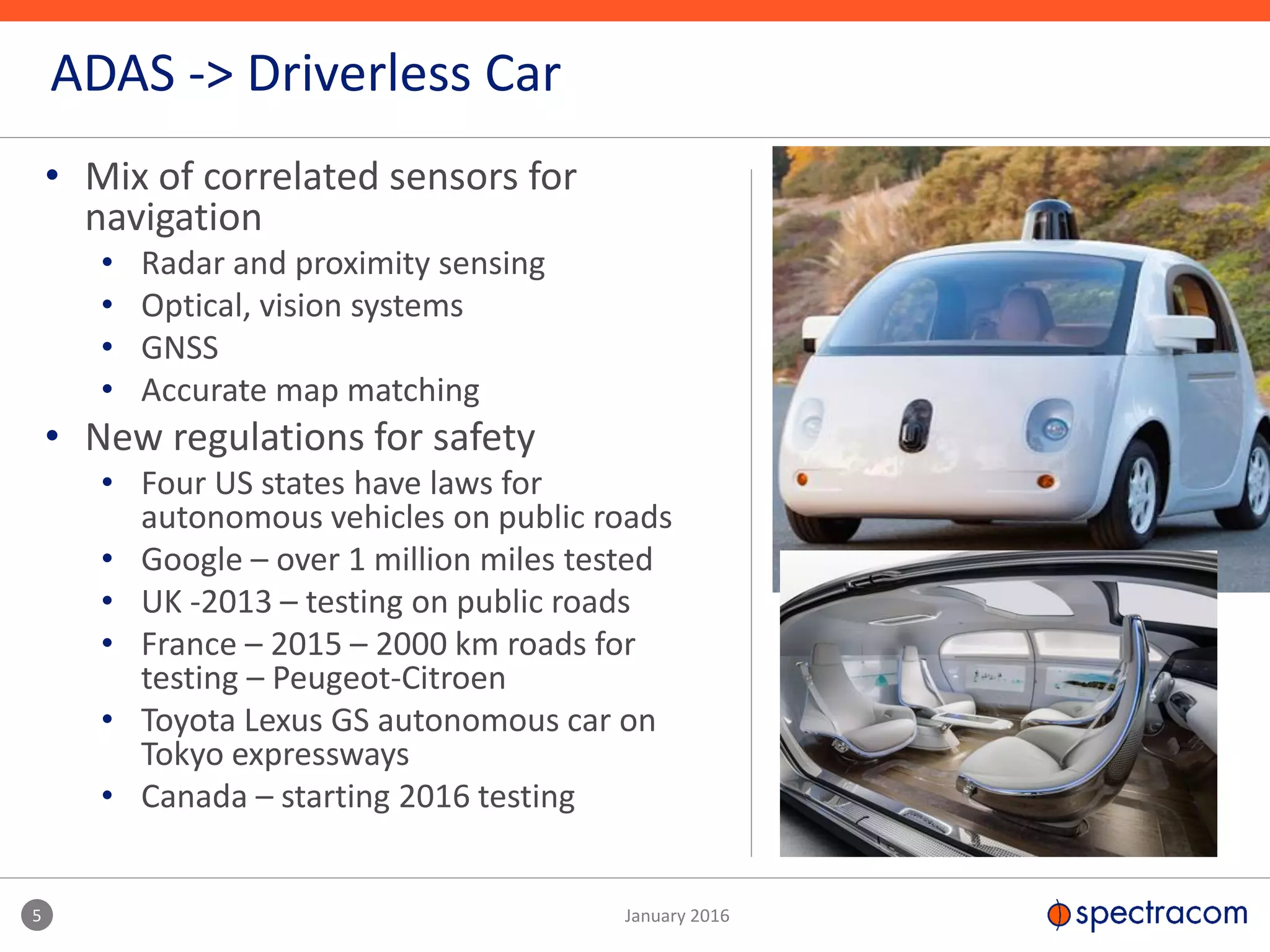
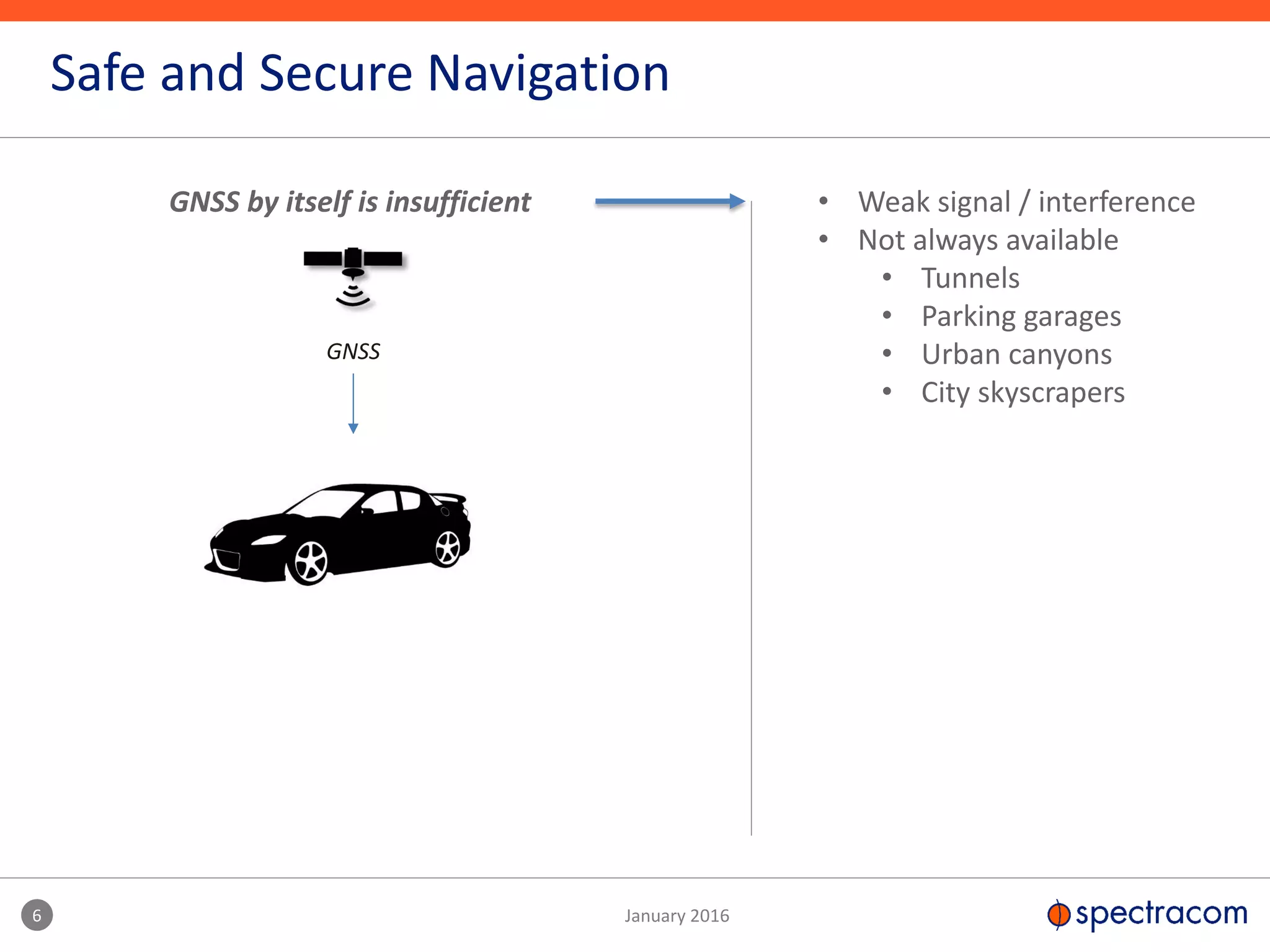
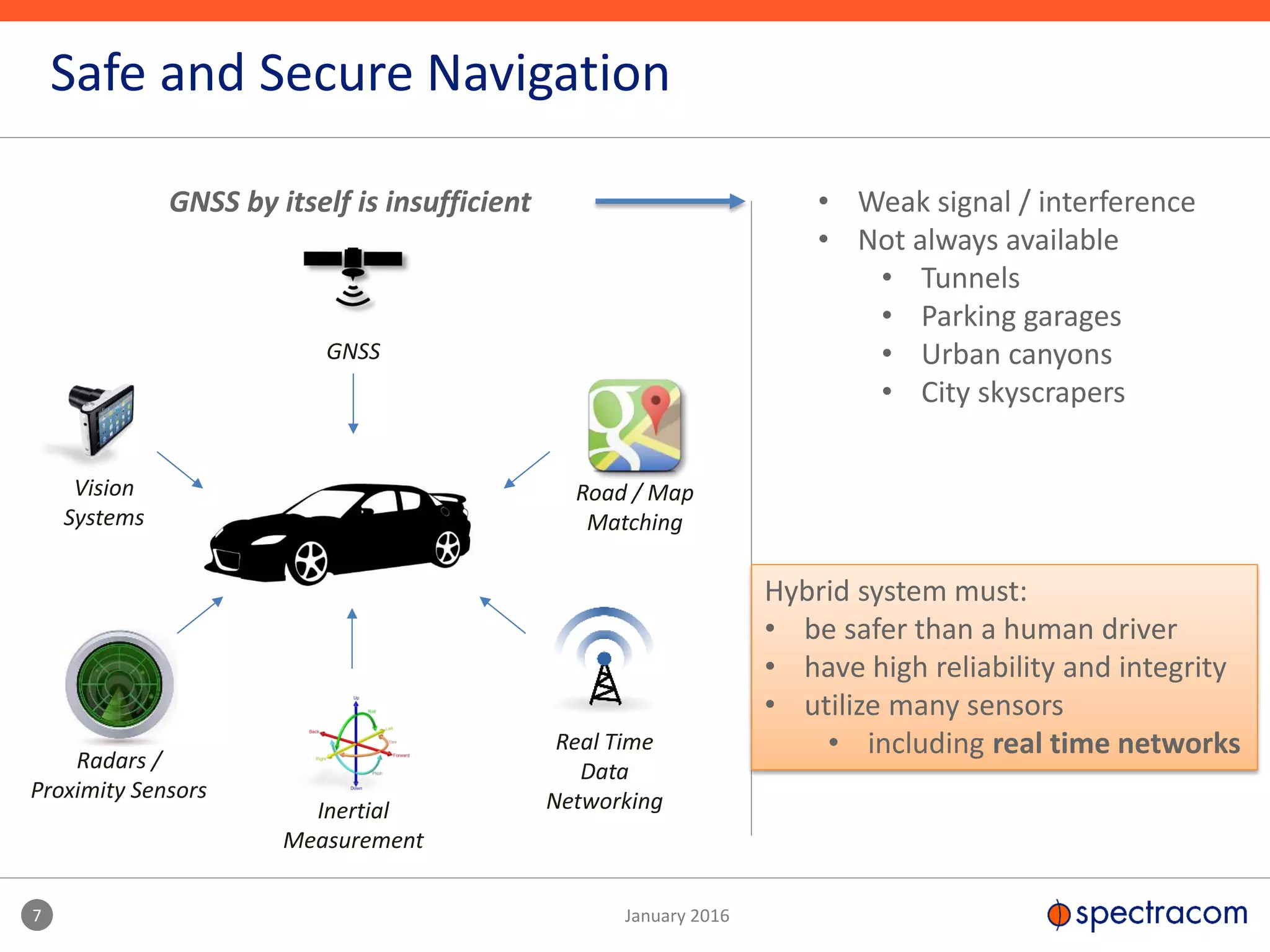
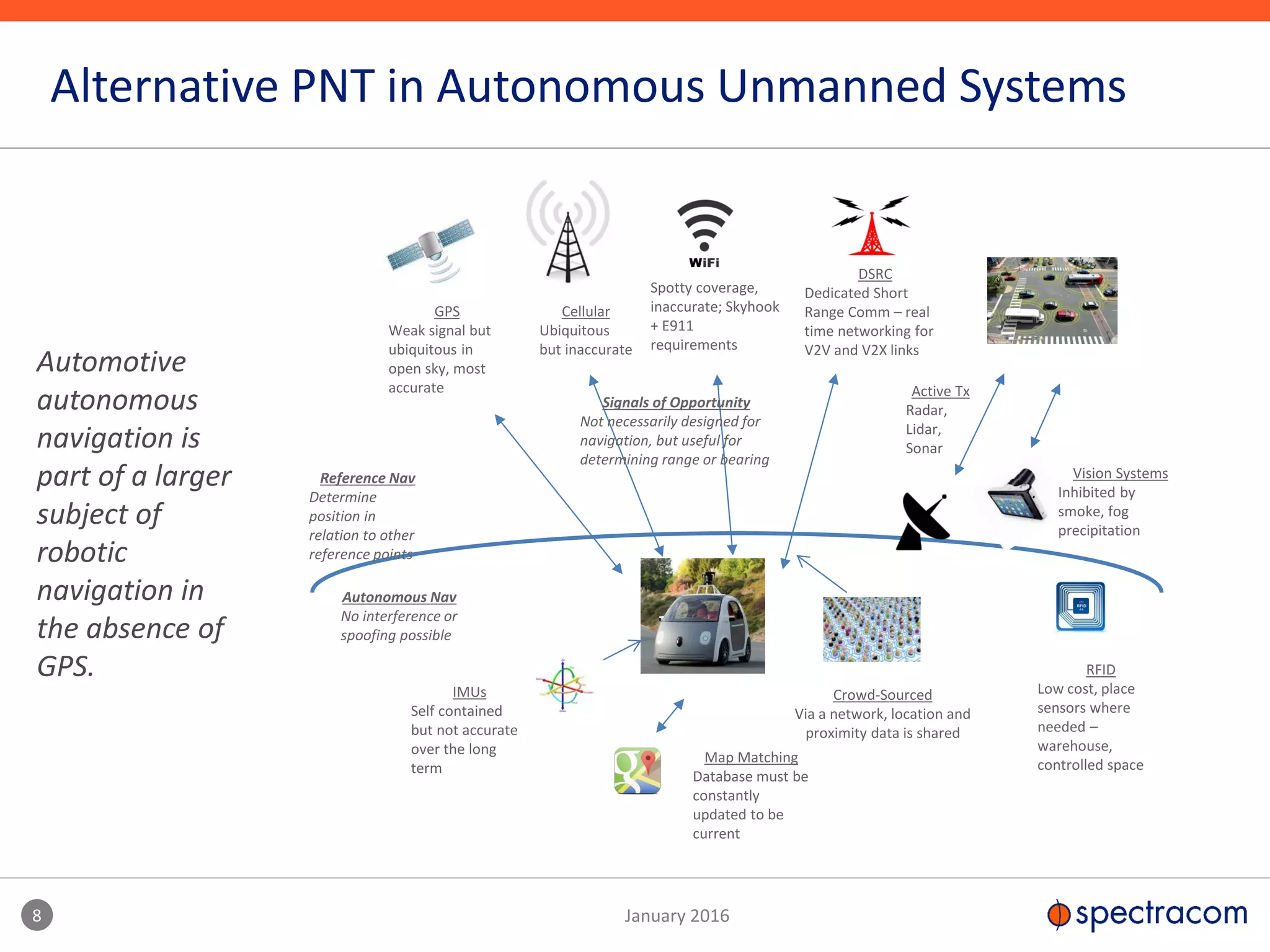
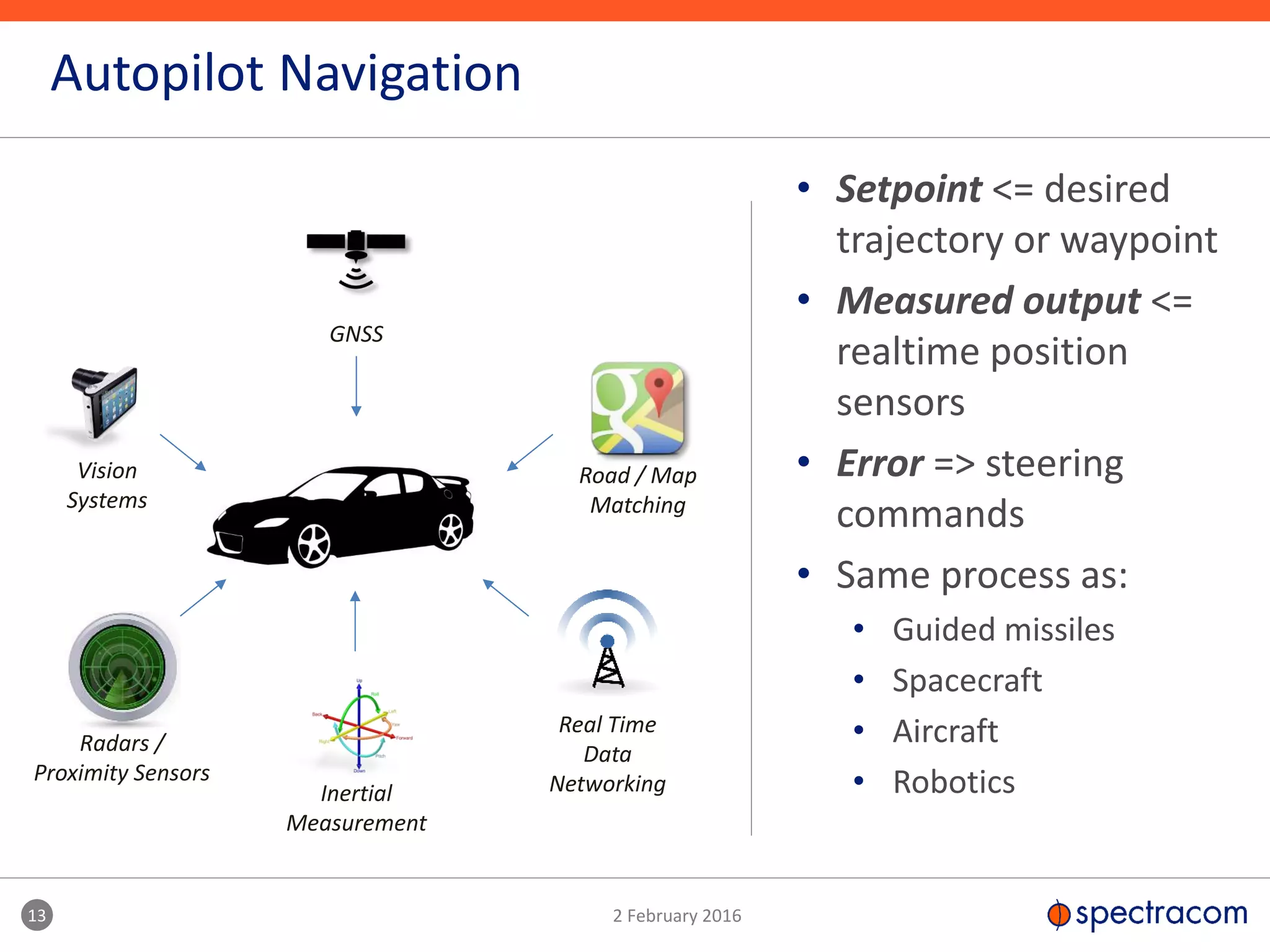
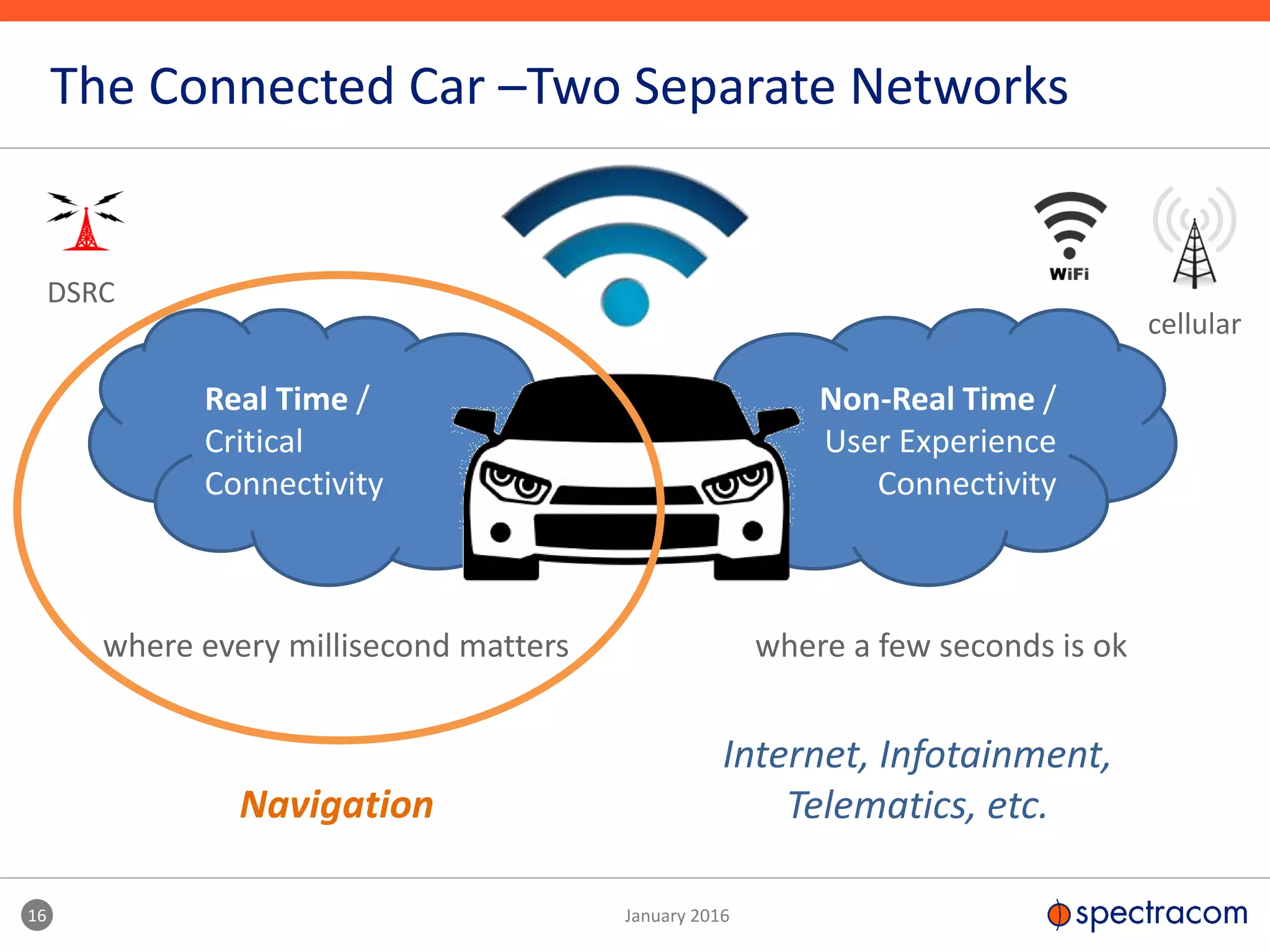
The document discusses the importance of timing for autonomous vehicle navigation. It notes that autonomous navigation requires a hybrid system that uses multiple sensors like GNSS, radar, vision systems and real-time networks. While GNSS alone is insufficient due to interference, lack of availability in certain areas and weak signals, a hybrid system must be highly reliable, utilize many sensors and ensure safety. It also discusses the role of time sensitive networks in autonomous vehicles and notes that network latency is a key factor since the network may be part of the vehicle's control loop. Simulation and testing of such complex systems is important to analyze interaction effects.
![• Low latency
• Predictable latency
• Reduce worst case delays
• Priority scheduling/pre-emption
• Instant switching to alternate
paths
• Ensure delivery
• Reliable for critical operations
• Under fading conditions
• Congestion and Doppler
• Fault tolerance and redundancy
• Security and Privacy
• Time delay implies distance
• Regulatory compliance
• Scalable to larger networks
17 January 2016
Time Sensitive Network Issues
IEEE Network Specs
802.11p – Wireless Vehicles
[DSRC]
802.1AS – Time Sync
1588v2 – Precise Time Protocol
802.1Qac – Path Control
802.1Qbv – Scheduled Traffic
802.1Qbu – Pre-emption
802.1Qca – Path Control
802.1Qcb – Seamless Redundant
802.11Qcc – Stream Reservation
802.11Qci – Filtering and Policing
802.11Qv – Time Mgmt Protocol](https://image.slidesharecdn.com/timing-considerations-driverless-car-160202223137/75/The-Importance-of-Timing-to-Autonomous-Vehicle-Navigation-17-2048.jpg)
![18 January 2016
Time Sensitivity for Automotive Networks
Let’s do the numbers [Order of Magnitude]
• 60 mph => 100 km/hr
30 m/s => 3 cm/millisecond
• System level response => msec
=> 1KHz update rates minimum
• Subsystem responses =>
10 – 100 usec range
• Network latency =>
< 100 usec over multiple hops [5-7]
• alternate fault tolerant paths
• all Bit Error Rate [BER] conditions
Latency is key if the network is part of the control loop:
• Stability
• Dynamic performance](https://image.slidesharecdn.com/timing-considerations-driverless-car-160202223137/75/The-Importance-of-Timing-to-Autonomous-Vehicle-Navigation-18-2048.jpg)