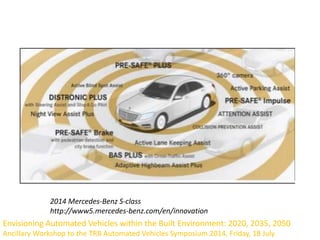
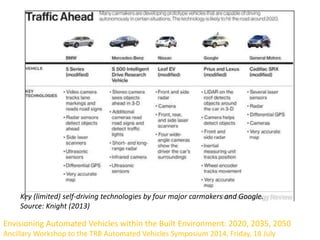
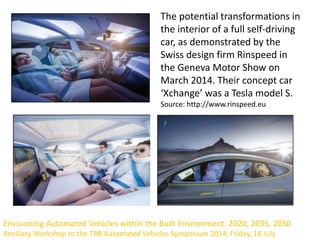
The document discusses the envisioned development of automated vehicle technology from 2020 to 2050. It outlines that by 2020, vehicles may have limited self-driving capabilities (Level 3 automation), major automakers are developing key self-driving technologies, and concepts show interior transformations as vehicles take over driving tasks. By 2030, vehicles may have full self-driving capabilities (Level 4 automation). By 2050, nearly all vehicles are expected to have full self-driving automation and it will be a standard feature in new vehicles. The document also includes a glossary defining technologies involved in automated driving like LIDAR, vehicle-to-vehicle communication, and vehicle platooning.