Download to read offline
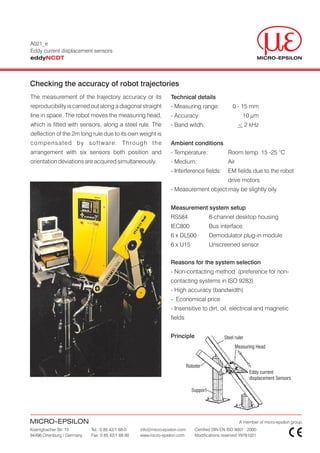

The document describes using eddy current displacement sensors to check the accuracy and reproducibility of robot trajectories. Six sensors mounted on a measuring head are moved along a steel rule by a robot to simultaneously acquire position and orientation deviations, with a measuring range of 0-15mm and accuracy of 10 micrometers. Reasons for selecting this non-contact system include its high accuracy, economical price, and insensitivity to dirt, oil, and electromagnetic fields.










































































