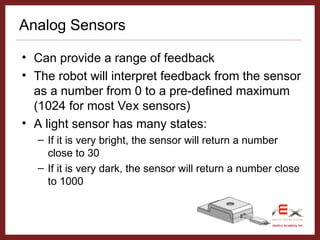
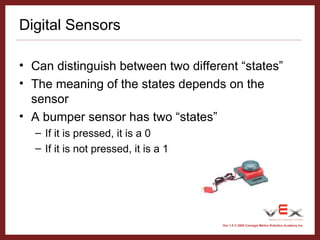
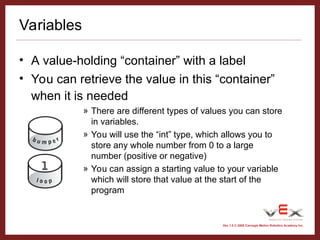
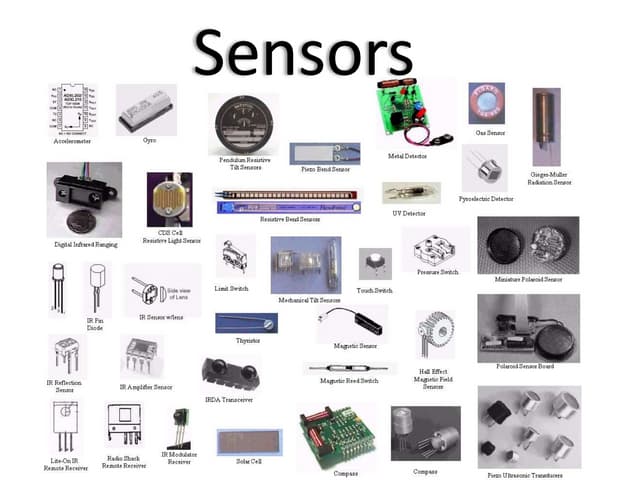
The document provides an introduction to robotics sensors, explaining their function in helping robots perceive their environment, distinguishing between two main types: analog and digital sensors. It details the operation of a bump sensor, various coding concepts such as variables and while loops, and instructions for implementing a simple program to control a motor based on sensor input. Overall, it serves as a foundational guide for understanding and programming sensor usage in robotics.