Download as PDF, PPTX











































































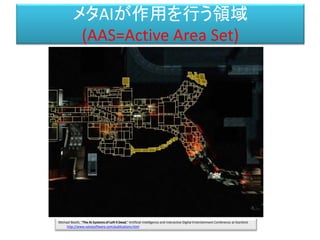
![適応型動的ペーシング
[基本的発想]
(1) ユーザーがリラックスしている時に、ユーザーの
緊張度が一定の敷居を超えるまで敵をぶつけ
続ける。
(2) ユーザーの緊張度が一定の緊張度を超えると
敵を引き上げる。
(3) リラックスすると敵を出現し始める((1)へ)。
Michael Booth, "The AI Systems of Left 4 Dead," Artificial Intelligence and
Interactive Digital Entertainment Conference at Stanford.
http://www.valvesoftware.com/publications.html](https://image.slidesharecdn.com/ymiyakemathpublic2017424former-170426163636/85/AI-77-320.jpg)

























































ゲームの人工知能の中に潜む数学を順番に解説します。 (上)(下)編からなります。 (下) https://www.slideshare.net/youichiromiyake/ai-75435715 1. 迷路とデータ構造と数学 2. ダンジョン自動生成のアルゴリズム 3. ナビゲーションAIとグラフ上の数学 4. 位置解析システムとフィルタリング 5. 力学系と意識の理論 6. シミュレーションベースと動的計画法 7. 強化学習と格闘ゲーム 8. ユーティリティとキャラクターの生理と心理 9. 知能方程式とゲームAIの本質 10. 統計学習とユーザーの癖の抽出 11. ランクシステムと正規分布 12. 遺伝的アルゴリズムとキャラクターたちの進化 13. ニューラルネットワークとキャラクターの学習 14. ディープラーニングと囲碁AI 15. ニューロエボリューションとバトルロワイヤル 16. 影響マップと勢力図 17. プロシージャル技術とレベル自動生成 18. グラフィクス自動生成とフラクタル 19. 街自動生成とL-ツリー 20. Sporeとプロシージャル技術 21. EVE ONLINE と拡散律速凝集シミュレーション







![[DL輪読会]近年のエネルギーベースモデルの進展](https://cdn.slidesharecdn.com/ss_thumbnails/energybasedmodel-200124020855-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DL輪読会]Grokking: Generalization Beyond Overfitting on Small Algorithmic Datasets](https://cdn.slidesharecdn.com/ss_thumbnails/20220325okimura-220405024717-thumbnail.jpg?width=640&height=640&fit=bounds)







![SSII2022 [SS1] ニューラル3D表現の最新動向〜 ニューラルネットでなんでも表せる?? 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ss1ssii2022hkatoneural3drepresentationhiroharukato-220607054619-fadc6480-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DL輪読会]NVAE: A Deep Hierarchical Variational Autoencoder](https://cdn.slidesharecdn.com/ss_thumbnails/nvaeadeephierarchicalvariationalautoencoder-201113004930-thumbnail.jpg?width=640&height=640&fit=bounds)





















































