Adaptive Control of Ball-Beam System
•
2 likes•745 views

Adaptive's Control Project Report - University of Patras - Electrical and Computer Engineering

More Related Content
Viewers also liked
Viewers also liked (20)
Similar to Adaptive Control of Ball-Beam System
Similar to Adaptive Control of Ball-Beam System (9)
More from Georgios-Marios Papadopoulos
More from Georgios-Marios Papadopoulos (12)
Adaptive Control of Ball-Beam System
- 1. Πανεπιςτήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίασ Υπολογιςτών Τομέασ Συςτημάτων Αυτομάτου Ελέγχου Μάθημα Προςαρμοςτικόσ Έλεγχοσ Project ζην κάζεκα “Προζαρμοζηικός Έλεγτος” κε ζέκα “’Ελεγτος ζσζηήμαηος ζθαίρας-ράβδοσ με τρήζη Προζαρμοζηικού Ελέγτοσ” Σπκκετέρνλτεο: Μπάξηδεο Χξήζηνο, 7321 Παπαδόπνπινο Γεώξγηνο – Μάξηνο, 7356 Έτνο: 2013 Εμάκελν: 9o Πεξηερόκελα 1|Σελίδα
- 2. Πανεπιςτήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίασ Υπολογιςτών Τομέασ Συςτημάτων Αυτομάτου Ελέγχου Μάθημα Προςαρμοςτικόσ Έλεγχοσ Σθνπόο H παξνύζα εξγαζία πξαγκαηεύεηαη ηνλ πξνζαξκνδόκελν έιεγρν ηνπ ζπζηήκαηνο ξάβδνο-ζθαίξα ζηα πιαίζηα ηνπ καζήκαηνο “Προζαρμοζηικός Έλεγτος” θαηά ην 9ν εμάκελν. 2|Σελίδα
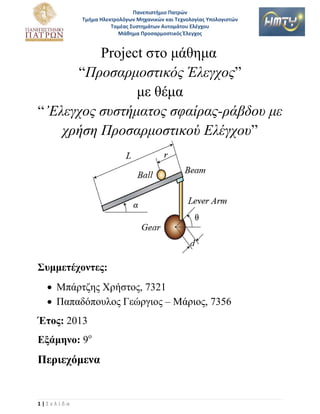
- 3. Πανεπιςτήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίασ Υπολογιςτών Τομέασ Συςτημάτων Αυτομάτου Ελέγχου Μάθημα Προςαρμοςτικόσ Έλεγχοσ Πεξηγξαυή Σπστήκατνο Τν ζύζηεκα ζθαίξαο-ξάβδνπ είλαη κηα πνιύ γλσζηή πεηξακαηηθή δηάηαμε, ε νπνία ζπλαληάηαη ζε πνιιά εξγαζηήξηα απηνκάηνπ ειέγνπ. Η ξάβδνο πεξηζηξέθεηαη ζε έλα θάζεην επίπεδν κέζσ κηαο ξνπήο ε νπνία δύλαηαη ζην θέληξν πεξηζηξνθήο από έλαλ (ζπλήζσο) DC ζεξβνθηλεηήξα. Η ζθαίξα θπιάεη ειεύζεξα πάλσ ζηε ξάβδν θαη ζε επαθή κε απηήλ. Oη εμηζώζεηο θίλεζεο ηνπ ζπζηήκαηνο είλαη: x1 x2 x2 B (x) x3 x4 x4 U 2 , where u M1(x) (Mx1 J Jb ) U (1) 2 M / (Jb / R 2 M ) , B (x) x1x4 G sin( x3 ) and 1 (x) 2 x1 x2 x4 Gx1 cos( x3 ) Όπνπ x1 : ζέζε ζθαίξαο x2 : ηαρύηεηα ζθαίξαο x3 : γσλία ξάβδνπ x4 : γσληαθή ηαρύηεηα ξάβδνπ u : ξνπή εηζόδνπ J : ξνπή αδξάλεηαο ξάβδνπ Jb : ξνπή αδξάλεηαο ζθαίξαο Μ : κάδα ηεο ζθαίξαο R : αθηίλα ηεο ζθαίξαο G : επηηάρπλζε ηεο βαξύηεηαο 3|Σελίδα
- 4. Πανεπιςτήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίασ Υπολογιςτών Τομέασ Συςτημάτων Αυτομάτου Ελέγχου Μάθημα Προςαρμοςτικόσ Έλεγχοσ To ζύζηεκα είλαη έλα ππνελεξγνπνηεκέλν ζύζηεκα κηαο θαη ν αξηζκόο ησλ ελεξγνπνηεηώλ είλαη κηθξόηεξνο από ησλ αξηζκώλ ησλ βαζκώλ ειεπζεξίαο (DOF’s). Ο λόκνο ειέγρνπ ησλ ζπζηεκάησλ απηώλ κπνξεί λα ζρεδηαζζεί ρξεζηκνπνηώληαο ηερληθέο κε γξακκηθνύ ειέγρνπ. Γηα ην κε-γξακκηθό ζύζηεκα ζθαίξαο-ξάβδνπ ε θπζηθε επηινγή εθηέιεζεο ηνπ λόκνπ ειέγρνπ κπνξεί λα είλαη ε κέζνδνο ηεο γξακκηθνπνηεκέλεο αλάδξαζεο (feedback linearization). Γπζηπρώο, όκσο, ν ζρεηηθόο βαζκόο ηνπ ζπζηήκαηνο (relative degree) δελ είλαη ζσζηά θαζνξηζκέλνο εμαηηίαο ηνπ θπγόθεληξνπ όξνπ x1 x42 πνπ βξίζθεηαη ζηελ έθθξαζε B . Γηα ην ιόγν απηόη ε ζπκβαηηθή πξνζέγγηζε γξακκηθνπνίεζεο εηζόδνπ-εμόδνπ (input-output) δελ είλαη εθαξκόζηκε ζην ζύζηεκα απηό. Η θιαζζηθή Ιαθσβηαλή (Jacobian) κέζνδνο γξακκηθνπνίεζεο κπνξεί λα ππνινγίζεη θαιά ην κε-γξακκηθό κνληέιν κόλν όηαλ νη θαηαζηάζεηο είλαη πνιύ θνληά ζην ζεκείν γξακκηθνπνίεζεο. Μνλτέιν γηα Πξνσαξκνδόκελν Νόκν Ειέγρνπ Πξνθεηκέλνπ λα ιύζνπκε ηνλ πξνζαξκνδόκελν έιεγρν ηνπ ζπζηήκαηνο ζθαίξαο-ξάβδνπ αο μαλαγξάςνπκε ηηο εμηζώζεηο θίλεζεο ζηελ αθόινπζε κνξθή x1 x2 x2 B (x) x3 x4 x4 K11 (x) K 2 u d (2) Όπνπ K1 M 1 , K2 2 ( Mx J Jb) ( Mx1 J Jb) 2 1 θαη d δειώλεη ηηο εμσηεξηθέο δηαηαξαρέο θαη ηα πξόζζεηα ζθάικαηα ηνπ κνληέινπ ηα νπνία ζεσξνύληαη θξαγκέλα δειαδή d Dm . Να ζεκεησζεί, επίζεο, όηη ε ηηκή Κ2 είλαη θξαγκέλε όπνπ 2 1/ K 2 m όπνπ Κ2m ηζνύηαη J + Jb. Η νξηνζέηεζε ηνπ Κ2 είλαη εγγπεκέλε 4|Σελίδα
- 5. Πανεπιςτήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίασ Υπολογιςτών Τομέασ Συςτημάτων Αυτομάτου Ελέγχου Μάθημα Προςαρμοςτικόσ Έλεγχοσ από ην πεπεξαζκέλν κήθνο ηεο ξάβδνπ. Οη παξάκεηξνη Κ1 θαη Κ2 είλαη ρξνληθά κεηαβαιιόκελνη θαη εμαξηώληαη από ην x1. Όκσο, όηαλ ε κάδα ηεο ζθαίξαο δελ είλαη κεγάιε θαη θηλείηαη θνληά ζην θέληξν ηεο ξάβδνπ νη παξάκεηξνη απηνί κπνξνύλ λα ζεσξεζνύλ αξγώο κεηαβαιιόκελνη θαη online αιγόξηζκνη εθηίκεζεο κπνξνύλ λα εθαξκνζζνύλ ζην λα θαζνξηζζνύλ νη ηηκέο ηνπο. Σε άιιε πεξίπησζε κπνξνύλε λα πξνζεγγηζηνύλ κε απιά Γνκηθά Νεπξσληθά Γίθηπα (SNN) κηαο εηζόδνπ (input-x1) θαη κηαο εμόδνπ (output-K2) όπσο ην RBF Νεπξσληθό Γίθηπν (Neural Network). Σηελ πεξίπησζε απηή, ην Κ2 κπνξεί λα γξαθεί σο 2 ( x1 ) (x1 ) όπνπ αληηπξνζσπεύεη ην άγλσζην δηάλπζκα βάξνπο 2 θαη ην 2 2 είλαη ην δηάλπζκα ησλ γλσζηώλ ζπλαξηήζεσλ βάζεο. 2 Δπηπιεόλ, ην Κ1 κπνξεί λα πξνζεγγηζηεί κε ηνλ ίδην ηξόπν θαη ε ηειεπηαία εμίζσζε (2) κπνξεί λα γξαθεί σο x4 (x1 ) (x1 )u d . 1 Οη άγλσζηεο παξάκεηξνη βάξνπο κπνξνύλ λα ζπληνληζηνύλ online. 1 , 2 ηνπ 1 2 2 λεπξσληθνύ δηθηύνπ Μνλτέιν βασησκέλν στνλ έιεγρν παξαθνινύζεσεο( Tracking control) Πξνθεηκέλνπ λα αλαπηύμνπκε έλαλ λόκν ειέγρνπ γηα ην ζύζηεκα ζθαίξα-ξάβδνο, αο νξίζνπκε ηηο παξαθάησ κεηξηθέο ζρέζεηο ζθάικαηνο (metric errors): S aS1 S2 a((x 2 x2 d ) (x1 x1d )) ( x4 x3 ) (3) Όπνπ α,ι>1 θαη x1d αλαπαξηζηά κηα θξαγκέλε, δηπιά δηαθνξίζηκε ηξνρηά ηεο κπάιαο, x2 d x1d . O πξώηνο όξνο (S1) ησλ κεηξηθώλ ζρέζεσλ ιάζνπο αλαπαξηζηά ην ζθάικα παξαθνινύζεζεο ηεο ζθαίξαο. Ο δεύηεξνο όξνο( S2) νξίδεηαη γηα λα απνθύγνπκε κεγάιε πιάηεο ηεο θίλεζε ηεο ζθαίξαο, ηα νπνία ζα εηζάγνπλ ζε θιεηζηό βξόγρν ην ζύζηεκα κε πεξηνξηζκέλν θύθιν ή αθόκα θαη ζε αζηάζεηα. Η πξνεγεζείζα πεξηγξαθόκελε ηξνρηά ηεο ζθαίξαο( x1d) ζα έπξεπε επίζεο λα πεξηγξαθεί κε ηέηνην ηξόπν ώζηε ε ηξνρηά λα έρεη ρακειέο κέγηζηεο ηηκέο γηα ηελ επηζπκεηή ηαρύηεηα ( x1d ) θαη επηηάρπλζε ( x1d ). 5|Σελίδα
- 6. Πανεπιςτήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίασ Υπολογιςτών Τομέασ Συςτημάτων Αυτομάτου Ελέγχου Μάθημα Προςαρμοςτικόσ Έλεγχοσ Από ζεσξεηηθή ζθνπηά νη κεηξηθέο ζρέζεηο ζθάικαηνο (3) κπνξνύλ λα ελεξγήζνπλ σο αθνινύζσο: νξίδνπκε Δ ζαλ a(x1 x1d ) x3 . Έηζη ην S κπνξεί λα γξαθεί σο S E E . Αλ έλαο (νιηζζαίλσλ ηύπνο) έιεγρνο κπνξεί λα βξεζεί, ην νπνίν ζεκαίλεη όηη S kS S κε ks >0, ηόηε S 0 θαζώο t .Απηό παξάγεη a(x1 x1d ) x3 0 θαζώο t . Από πξαθηηθή ζθνπηά δε πξνζκέλνπκε ην ζθάικα θαζώο t ην S 0 , επεηδή ε θίλεζε ηεο ζθαίξαο ζεσξεί όηη ν δεύηεξνο όξνο (S2) ηνπ S πξαθηηθά δελ ζα είλαη πνηέ 0. Έηζη, νξίδνπκε ην επηηεύμηκν ζθάικα λα νξηνζεηεί Φ>0 θαη λα αλαδηαηππώλεη ηηο κεηξηθέο ζρέζεηο ζθάικαηνο σο S S sat (S / ) . Αλ ν λόκνο ειέγρνπ εγγπάηαη όηη ε ζύγθιηζε ηνπ SΓ ζην κεδέλ, ηόηε ην S ζα ζπγθιίλεη κέζα ζε έλα νξηνζεηεκέλν πεδίν κε όξην Φ. Βαζηδόκελνη ζηελ δπλακηθή ηνπ ζπζηήκαηνο (2), ε δπλακηθή ηνπ SΓ γηα S δίλεηαη από: S S a((x 2 x1d ) (x1 x1d )) ( x4 x3 ) (( (x) x1d ) ( x2 x2 d )) K11 ( x) K 2u x4 d (4) Γηα λα βξνύκε έλα κνληέιν βαζηζκέλν ζηνλ λόκν ειέγρνπ γηα ην ζύζηεκα ζθαίξα-ξάβδνο, νξίδνπκε ηελ αθόινπζε ζπλάξηεζε Lyapunov: 1 2 2 V S (5) Αλ νη δηαηαξαρέο d είλαη ακειεηέεο ζηελ (4), ε ρξνληθή παξάγσγνο ηεο ζπλάξηεζεο Lyapunov δίλεηαη από: V S S S ( (( (x) x1d ) ( x2 x2d )) ( K11 ( x) K2u x4 )) (6) Οξίδνπκε ηνλ λόκν ειέγρνπ σο: u κε kS>0. 6|Σελίδα 1 ( (( (x) x1d ) ( x2 x2 d )) ( K11 ( x) x4 k s S ) (7) K2
- 7. Πανεπιςτήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίασ Υπολογιςτών Τομέασ Συςτημάτων Αυτομάτου Ελέγχου Μάθημα Προςαρμοςτικόσ Έλεγχοσ 2 Ο λόκνο ειέγρνπ u εγγπάηαη όηη V kS S 0 , αλ SΓ 0, έηζη εγγπάηαη ηελ νξηνζέηεζε ησλ κεηξηθώλ ζρέζεσλ ηνπ S. Δπηπξόζζεηα, παξαηεξνύκε όηη ν λόκνο ειέγρνπ (7) παξάγεη ην ζθάικα παξαθνινύζεζεο ηεο δπλακηθήο S kS S . Σύκθσλα κε ηνλ παξαπάλσ λόκν ειέγρνπ, ηαπηόρξνλα, ιύλεηαη ην πξόβιεκα ζηαζεξνπνίεζεο θαη παξαθνινύζεζεο γηαην ππνδηεγεξκέλν ζύζηεκα ζθαίξαο-ξάβδνπ. Πξνέθτασε τνπ λόκνπ ειέγρνπ Αλ ζεσξήζνπκε όηη νη παξάκεηξνη ηνπ ζπζηήκαηνο είλαη άγλσζηνη, είλαη απαξαίηεηε ε πξνζαξκνδόκελε εθηίκεζε ησλ παξακέηξσλ ηνπ ζπζηήκαηνο. Γεληθεύνληαο ην πξόβιεκα, ζεσξνύκε όηη K11 (x) θαη K2 γηα ηελ εμίζσζε (2) δηαηππώλνληαη σο: K11 (x) (x) θαη 1 K 2 2 (x) 2 κε άγλσζηεο παξακέηξνπο ηα δηαλύζκαηα 1 θαη 1 2 . Αθνύ ε δπλακηθή ηνπ ζπζηήκαηνο ζθαίξα-ξάβδνο (1) δελ κπνξεί λα γξαθεί ζε θαλνληθή κνξθή, νη κέζνδνη πξνζαξκνδόκελνπ ειέγρνπ πνπ αλαπηύρζεθαλ γηα ζπζηήκαηα ζε θαλνληθή κνξθή δελ κπνξνύλ λα εθαξκνζηνύλ απεπζείαο γηα ην ζύζηεκα ζθαίξα-ξάβδνο. Ο πξνζαξκνδόκελνο έιεγρνο πνπ παξνπζηάζηεθε παξαπάλσ βαζίζηεθε ζηηο κεηξηθέο εμηζώζεηο ζθάικαηνο (3). Με ηηο άγλσζηεο παξακέηξνπο, ν λόκνο ειέγρνπ κπνξεί λα δηαηππσζεί ρξεζηκνπνηώληαο ηηο εθηηκόκελεο παξακέηξνπο, νη νπνίεο παξήρζεζαλ Online. Πξνθεηκέλνπ λα επηηύρνπκε ην ζηόρν ειέγρνπ S 0 θαζώο t κε άγλσζηεο παξακέηξνπο, αο δηαηππώζνπκε ηνλ λόκν ειέγρνπ: u ( x) 2 2 2 u 2 κε ( x) 2 u a(( B (x) x1d ) ( x2 x2d )) 1 ( x) x4 kS S Dm sat (S / ) 1 7|Σελίδα
- 8. Πανεπιςτήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίασ Υπολογιςτών Τομέασ Συςτημάτων Αυτομάτου Ελέγχου Μάθημα Προςαρμοςτικόσ Έλεγχοσ Όπνπ δ>0 είλαη κηα κηθξή ζεηηθή ζηαζεξά θαη ξ ε αθόινπζε ζπλάξηεζε: 0, if g g m (g) g m g / g1 , if g m g1 1, otherwise g gm Γηα ηηο άγλσζηεο παξακέηξνπο ε αθόινπζε εθηίκεζε κπνξεί λα ρξεζηκνπνηεζεί: S (x) S (x) 1 κε 0 , 1 , 2 0, 2 1 1 S u 2 (x) S u 2 2 (x) K 2 m 2 απζηεξά ζεηηθά πεπεξαζκέλνη δηαγώληνη πίλαθεο. Η ζύγθιηζε ηνπ SΓ θαη ε νξηνζέηεζε ησλ ζεκάησλ ζην ζύζηεκα ειέγρνπ κπνξεί λα απνδεηρζεί κε ηνλ ίδην ηξόπν όπσο ην πξνεγνύκελν θνκκάηη. Η ζπλάξηεζε Lyapunov νξίδεηαη σο: V (t ) 1 2 1 2 1 1 S (t) V 1 11 1 2 12 2 2 2 2 2 Πξνσνκνίωσε Σπστήκατνο Οξίδνπκε ηηο παξακέηξνπο ηνπ ζπζηήκαηνο (απζαίξεηα), ζεσξώληαο όηη ε ζθαίξα θπιίεηαη ρσξίο λα νιηζζαίλεη θαη όηη ε ηξηβή είλαη ακειεηέα. Οη ζηαζεξέο θαη νη κεηαβιεηέο ηνπ ζπζηήκαηνο νξίδνληαη σο: (m) (R) (d) (g) (L) (J) (r) mass of the ball radius of the ball lever arm offset gravitational acceleration length of the beam ball's moment of inertia ball position coordinate 8|Σελίδα 0.11 kg 0.015 m 0.03 m 9.8 m/s^2 1.0 m 9.99e-6 kg.m^2
- 9. Πανεπιςτήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίασ Υπολογιςτών Τομέασ Συςτημάτων Αυτομάτου Ελέγχου Μάθημα Προςαρμοςτικόσ Έλεγχοσ (alpha) (theta) beam angle coordinate servo gear angle Η δεύηεξε παξάγσγνο ηεο γσλίαο εηζόδνπ a επεξεάδεηαη από ηε δεύηεξε παξάγσγν ηεο αθηίλαο r. Όκσο, αγλνώληαο ην γεγνλόο απηό ε ιαγθξαλδηαλή εμίζσζε θίλεζεο γηα ηε ζθαίξα νξίδεηαη σο εμήο: J m r 2 mg sin(a) mra 2 2 r 0 Η γξακκηθνπνίεζε ηεο εμίζσζεο απηήο γηα ηε γσλία ηεο ξάβδνπ a=0 καο δίλεη ηελ αθόινπζε γξακκηθή πξνζέγγηζε ηνπ ζπζηήκαηνο: J 2 2 m r mga r Η εμίζσζε πνπ ζπλδέεη ηελ γσλία ηεο ξάβδνπ κε ηε γσλία ηνπ θηλεηήξα κπνξεί λα πξνζεγγηζηεί σο γξακκηθή από ηελ παξαθάησ εμίζσζε: a d L Άξα ε πξνεγνύκελε εμίζσζε γίλεηαη: d J 2 2 m r mg L r Ο κεηαζρεκαηηζκόο Laplace ηεο ηειεπηαίαο εμίζσζεο είλαη: d J 2 2 m R (s) s mg ( s ) L r Άξα ε ζπλάξηεζε κεηαθνξάο είλαη: R( s) mgd s2 ( s ) J L 2 m r Παραηήρηζη: Δπεηδή ν παξαλνκαοηήο έρεη έλαλ δηπιό νινθιεξσηή ηόηε έρσ νξηαθή επζηάζεηα επνκέλσο ζα έρσ πξόβιεκα ζηνλ έιεγρν. 9|Σελίδα
- 10. Πανεπιςτήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίασ Υπολογιςτών Τομέασ Συςτημάτων Αυτομάτου Ελέγχου Μάθημα Προςαρμοςτικόσ Έλεγχοσ Η ζπλάξηεζε κεηαθνξάο ζην MatLab πινπνηείηαη σο εμήο: m = 0.111; R = 0.015; g = -9.8; L = 1.0; d = 0.03; J = 9.99e-6; s = tf('s'); P_ball = -m*g*d/L/(J/R^2+m)/s^2 Aλ ηξέμνπκε ηνλ θώδηθα, ε ζπλάξηεζε κεηαθνξάο πνπ πξνθύπηεη είλαη ε παξαθάησ: P_ball = 0.21 ---s^2 Continuous-time transfer function. Tν γξακκηθνπνηεκέλν ζύζηεκα εμηζώζεσλ κπνξεί λα πεξηγξαθεί θαη κέζσ ησλ θαηαζηαηηθώλ εμηζώζεσλ. Θεσξνύκε σο κεηαβιεηέο θαηάζηαζεηο ηελ ζέζε θαη ηελ ηαρύηεηα ηεο κπάιαο θαη σο είζνδν ηελ γσλία ηνπ θηλεηήξα. 0 r 0 1 r mgd r 0 0 r J L R2 m Σην δηθό καο παξάδεηγκα ζα ρξεζηκνπνηήζνπκε ειαθξώο δηαθνξεηηθό κνληέιν θαη αληί λα ειέγμνπκε ηε ζέζε κέζσ ηεο γσλίαο ηνπ θηλεηήξα 10 | Σ ε λ ί δ α
- 11. Πανεπιςτήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίασ Υπολογιςτών Τομέασ Συςτημάτων Αυτομάτου Ελέγχου Μάθημα Προςαρμοςτικόσ Έλεγχοσ ζα ειέγμνπκε ηε ξνπή ηεο ξάβδνπ. Οπόηε νη θαηαζηαηηθέο εμηζώζεηο γίλνληαη: 0 r r 0 a 0 a 0 1 0 0 0 0 mg J 2 m R 0 0 0 r 0 0 r 0 a 0 u 0 a 1 0 r r y 1 0 0 0 a a Παραηήρηζη: Γηα ην ζύζηεκα απηό δελ ρξεζηκνπνηείηαη βξαρίνλαο αιιά έλαο θηλεηήξαο ζην θέληξν ηεο ξάβδνπ πνπ ζα εθαξκόζεη ηελ ξνπή πνπ απαηηείηαη γηα ηνλ έιεγρν ηεο ζέζεο ηεο κπάιαο. Οη θαηαζηαηηθέο εμηζώζεηο ζην MatLab πινπνηνύληαη σο εμήο: H = -m*g/(J/(R^2)+m); A = [0 1 0 0 0 0 H 0 0 0 0 1 0 0 0 0]; B = [0 0 0 1]'; C = [1 0 0 0]; D = [0]; ball_ss = ss(A,B,C,D) Aλ ηξέμνπκε ηνλ θώδηθα, πξνθύπηεη όηη: ball_ss = a = x1 x2 11 | Σ ε λ ί δ α x3 x4
- 12. Πανεπιςτήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίασ Υπολογιςτών Τομέασ Συςτημάτων Αυτομάτου Ελέγχου Μάθημα Προςαρμοςτικόσ Έλεγχοσ x1 0 1 0 0 x2 0 0 7 0 x3 0 0 0 1 x4 0 0 0 0 x1 x2 x3 x4 1 0 0 0 b = u1 x1 0 x2 0 x3 0 x4 1 c = y1 d = u1 y1 0 Continuous-time state-space model. Δίδακε πξνεγνπκέλσο, όηη ην ζύζηεκα ζθαίξαο-ξάβδνπ είλαη έλα ζύζηεκα ηύπνπ ΙΙ, ην νπνίν έρεη δύν πόινπο. Η αθόινπζε γξαθηθή παξάζηαζε, ε νπνία εμήρζε ζην MatLab ζπκθσλεί κε όηη ππνζέζακε πξνεγνπκέλσο. pzmap(P_ball) 12 | Σ ε λ ί δ α
- 13. Πανεπιςτήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίασ Υπολογιςτών Τομέασ Συςτημάτων Αυτομάτου Ελέγχου Μάθημα Προςαρμοςτικόσ Έλεγχοσ Δπίζεο, ζέινπκε λα δνύκε ηελ απόθξηζε ηεο κπάιαο ζε κηα βεκαηηθή είζνδν. step(P_ball) 13 | Σ ε λ ί δ α
- 14. Πανεπιςτήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίασ Υπολογιςτών Τομέασ Συςτημάτων Αυτομάτου Ελέγχου Μάθημα Προςαρμοςτικόσ Έλεγχοσ Ο ιόγνο γηα ηνλ νπνίν πξαγκαηνπνηείηαη ν γεσκεηξηθόο ηόπνο είλαη γηα λα εθηηκήζνπκε ηελ απόθξηζε ηνπ θιεηζηνύ βξόγρνπ από ηελ γξαθηθή παξάζηαζε ησλ ξηδώλ ηνπ αλνηρηνύ-βξόγρνπ. Με ηελ πξόζζεζε κεδεληθώλ ή πόισλ ζην ζύζηεκα (αληηζηαζκηζηήο) ν γεσκεηξηθόο ηόπνο θαη θαη’επέθηαζε ε απόθξηζε θιεηζηνύ βξόγρνπ ζα ηξνπνπνηεζνύλ. rlocus(P_ball) 14 | Σ ε λ ί δ α
- 15. Πανεπιςτήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίασ Υπολογιςτών Τομέασ Συςτημάτων Αυτομάτου Ελέγχου Μάθημα Προςαρμοςτικόσ Έλεγχοσ Παξαηεξνύκε όηη έρεη δύν πόινπο νη νπνίνη πεγαίλνπλ ζην άπεηξν θαηά κήθνο ηνπ θαληαζηηθνύ άμνλα. Ο ιόγνο απόζβεζεο θαη ε ηδηνζπρλόηεηα βξέζεθαλ ρξεζηκνπνηώληαο ηελ αθόινπζε εμίζσζε ε νπνία ζπζρεηίδεη ην πνζνζηό ππεξύςσζεο θαη ην Ts: %OS 100e 4 s 1 2 n Ο ζθνπόο ηεο ρξήζεο ηνπ Bode δηαγξάκκαηνο είλαη ε εθηίκεζε ηεο απόθξηζεο ηνπ θιεηζηνύ βξόγρνπ. Πξνζζέησληαο έλαλ ειεγθηή ζην ζύζηεκα αιιάδνπκε ην Bode δηάγξακκα αλνηρηνύ βξόγρνπ, νπόηε αιιάδεη θαη ε απόθξηζε θιεηζηνύ βξόγρνπ. bode(P_ball) 15 | Σ ε λ ί δ α
- 16. Πανεπιςτήμιο Πατρών Τμήμα Ηλεκτρολόγων Μηχανικών και Τεχνολογίασ Υπολογιςτών Τομέασ Συςτημάτων Αυτομάτου Ελέγχου Μάθημα Προςαρμοςτικόσ Έλεγχοσ 16 | Σ ε λ ί δ α