Downloaded 29 times


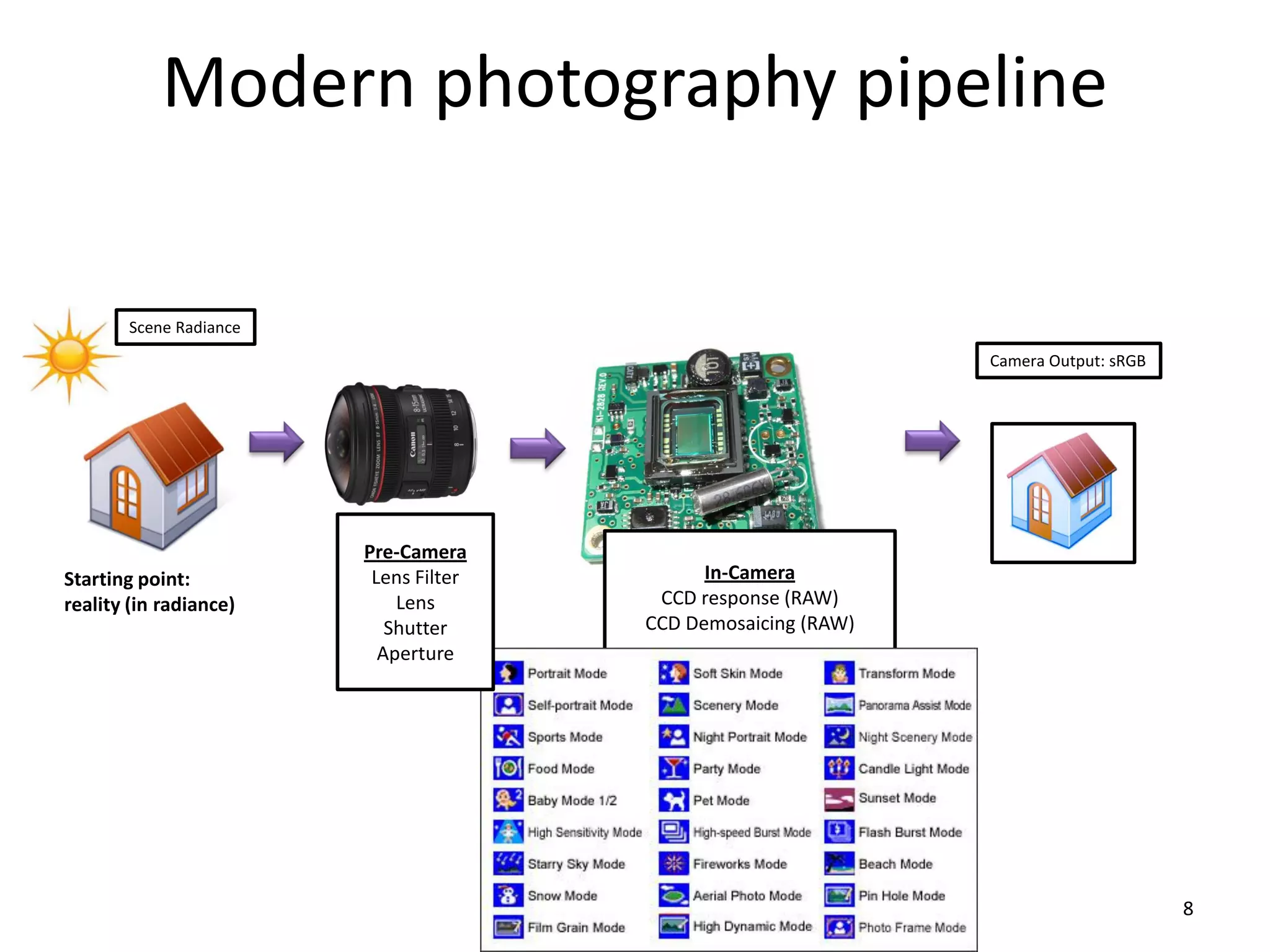
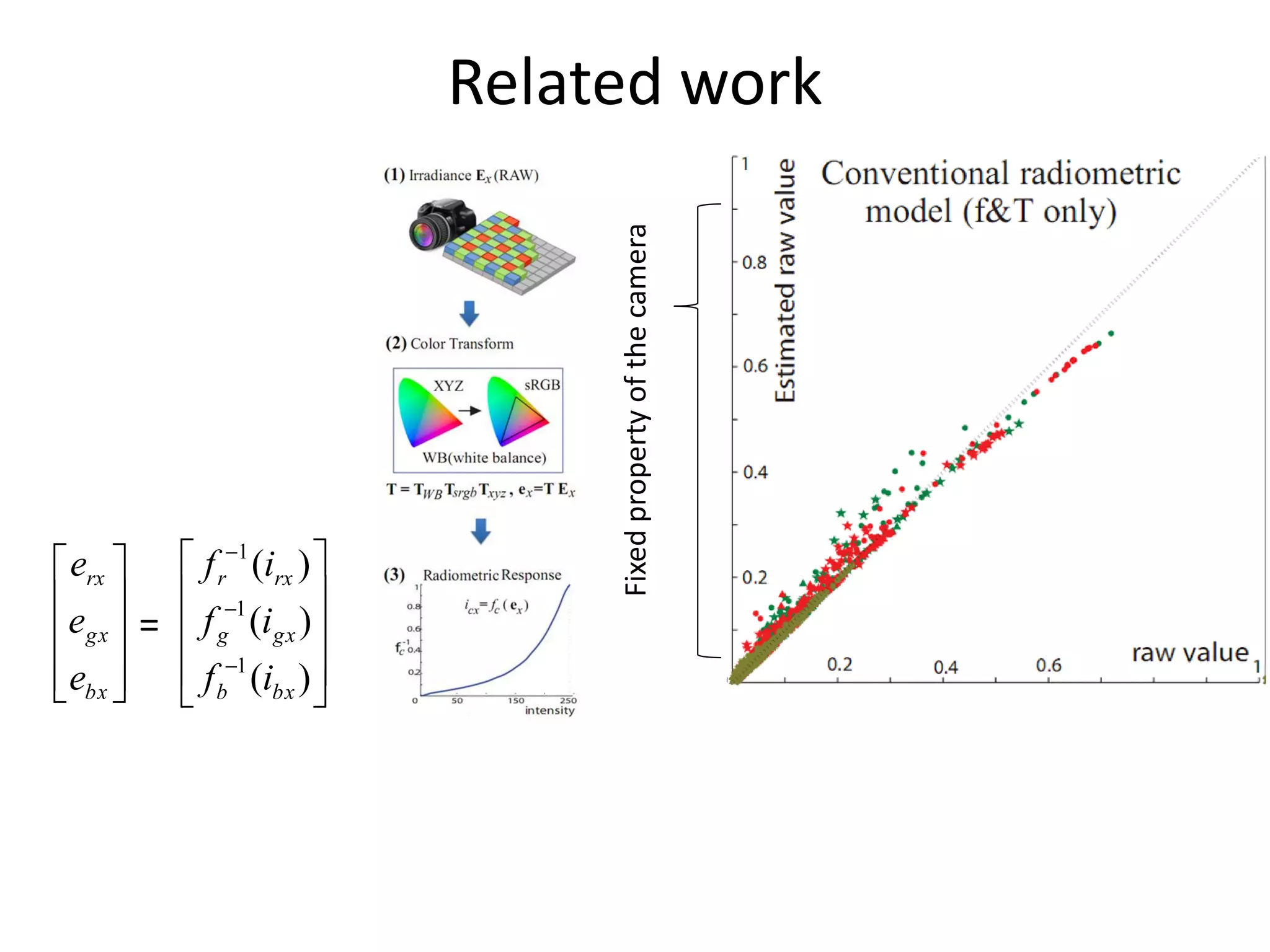
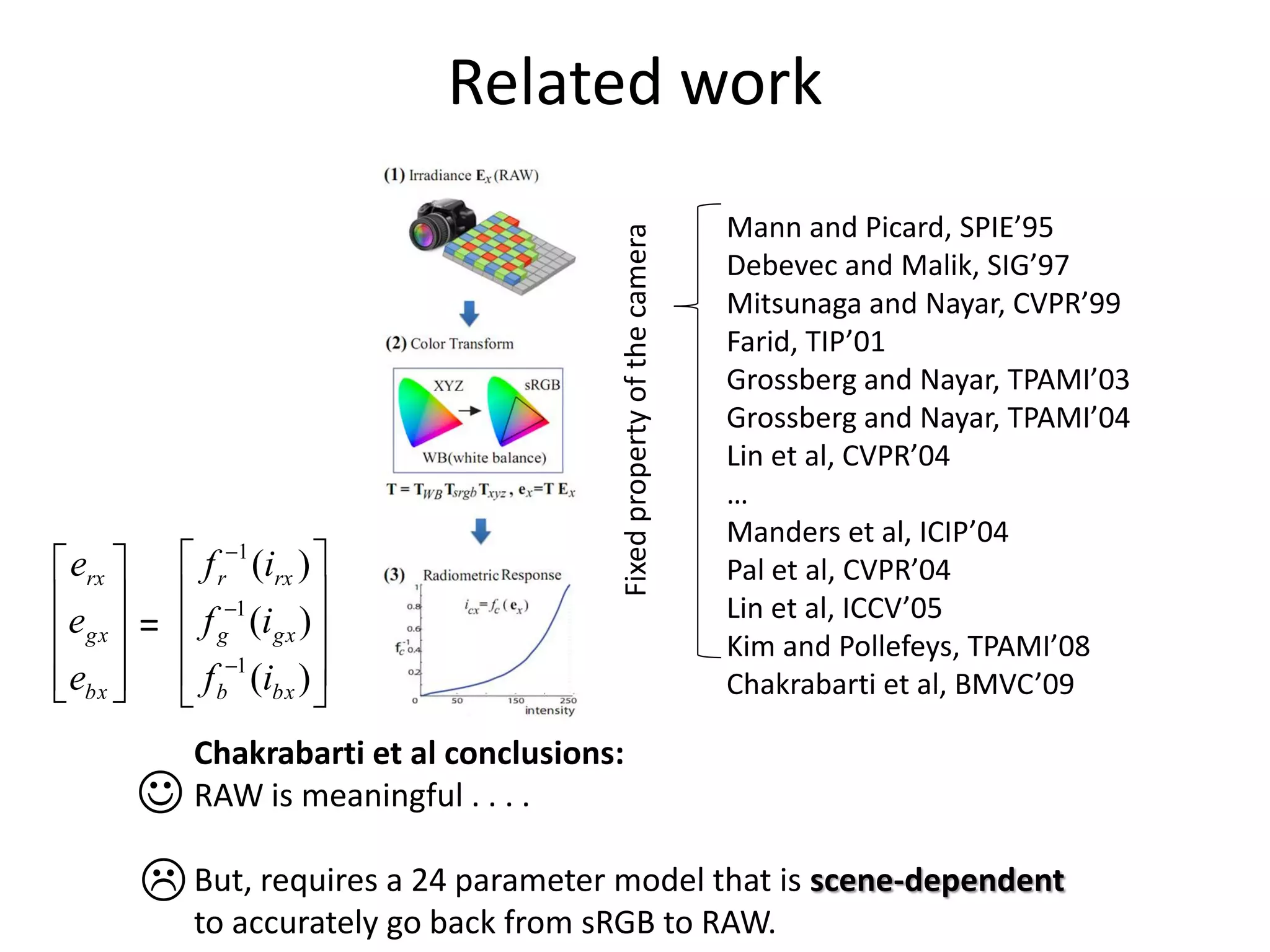
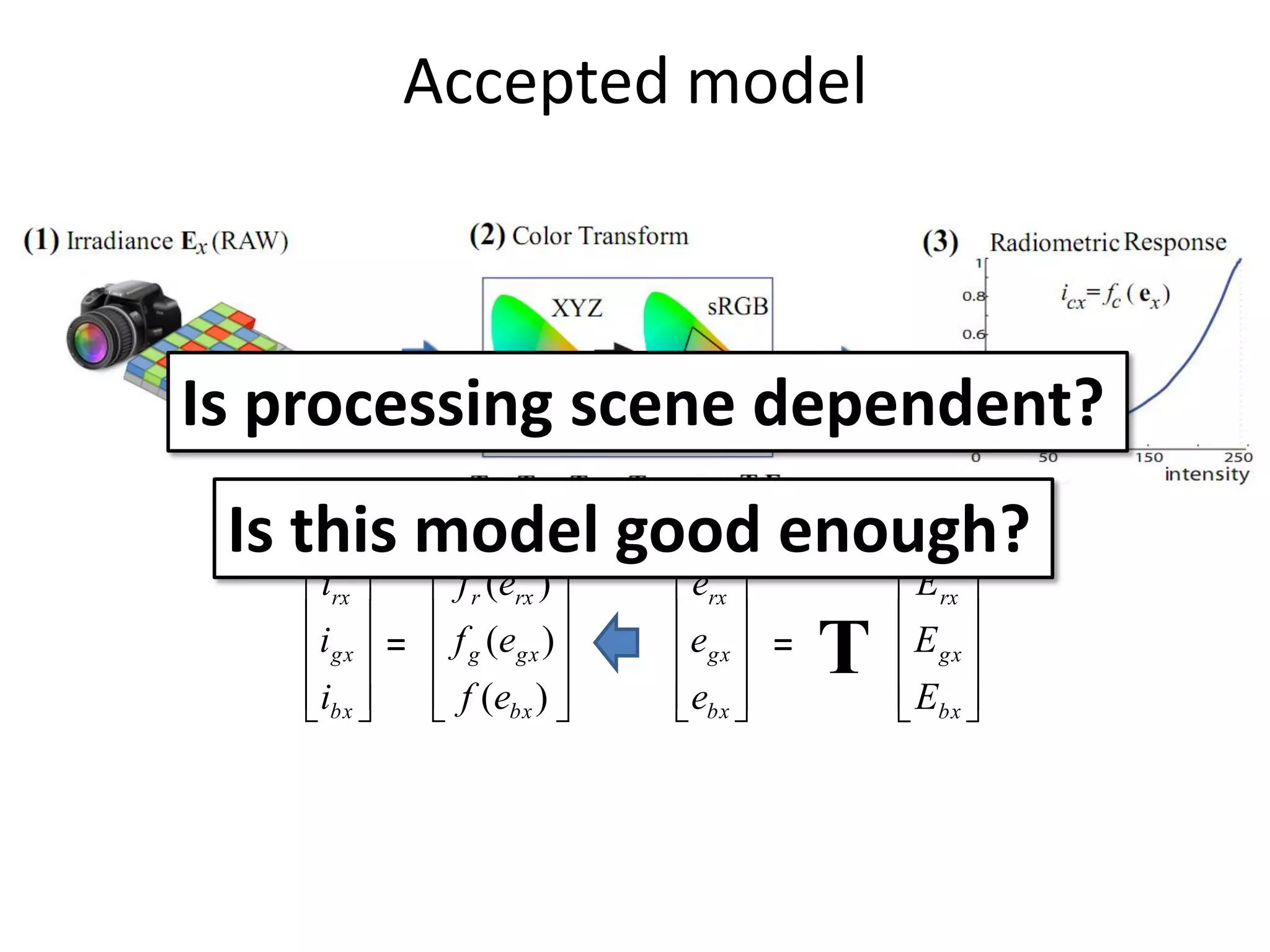
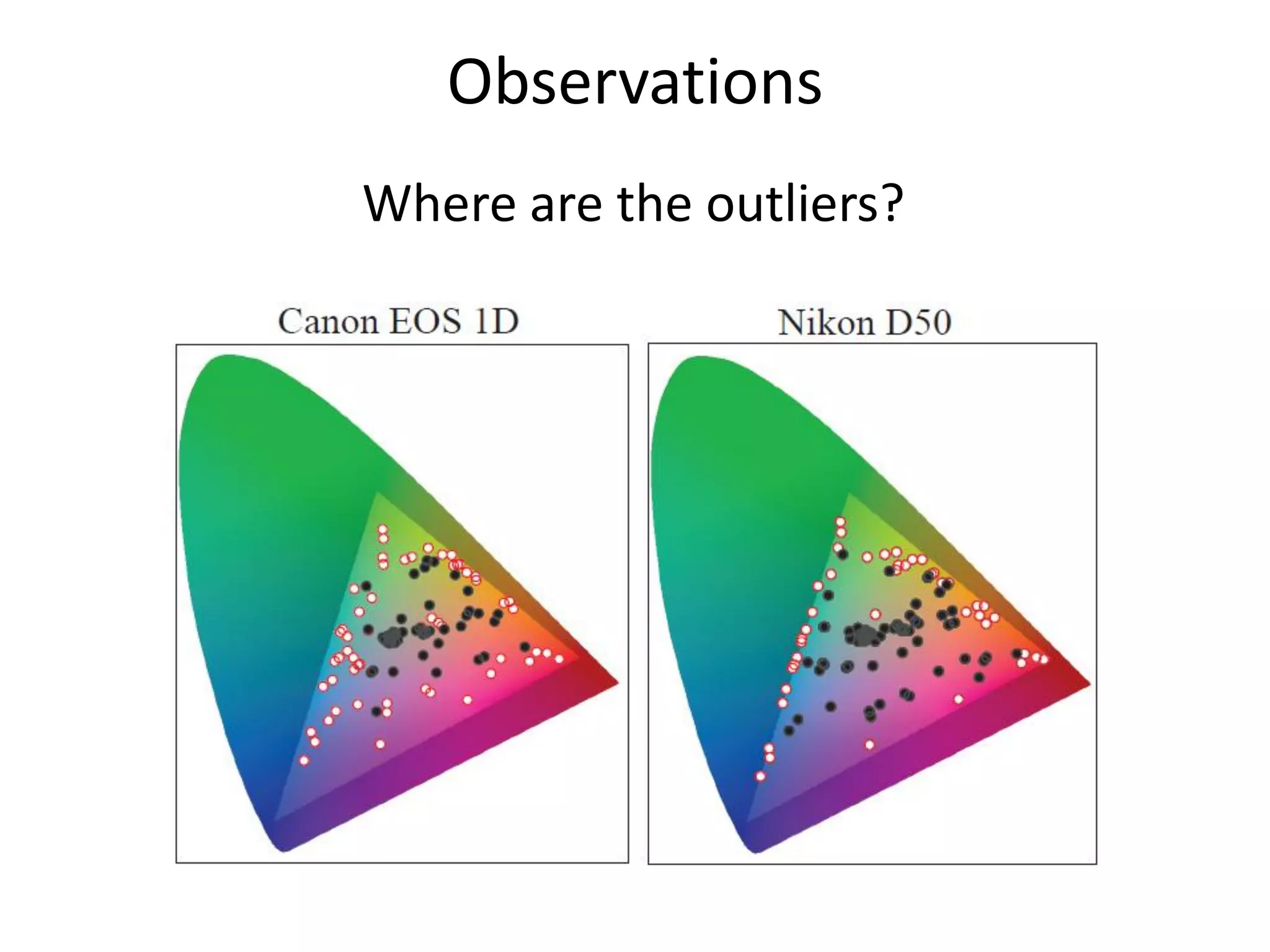
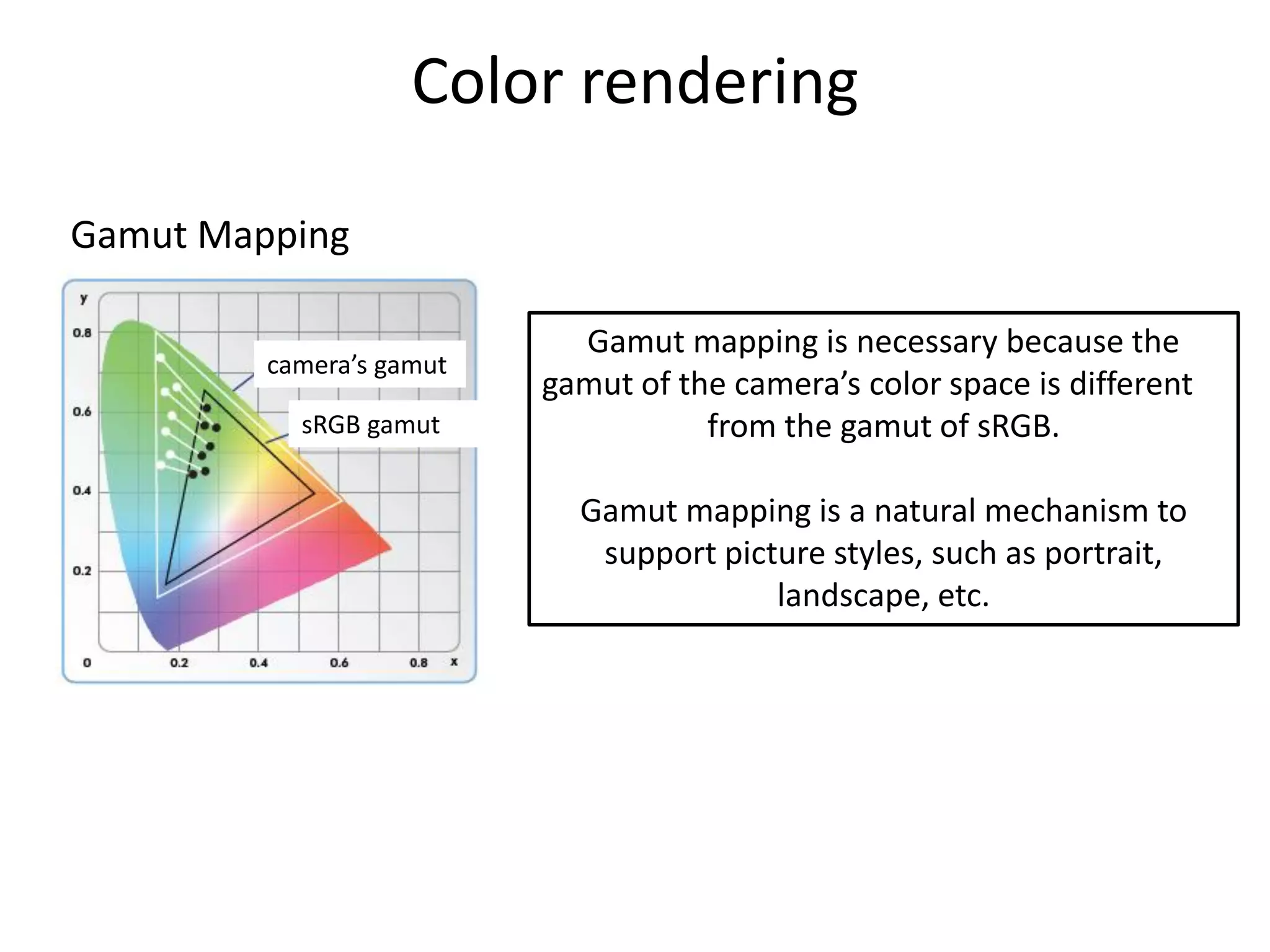

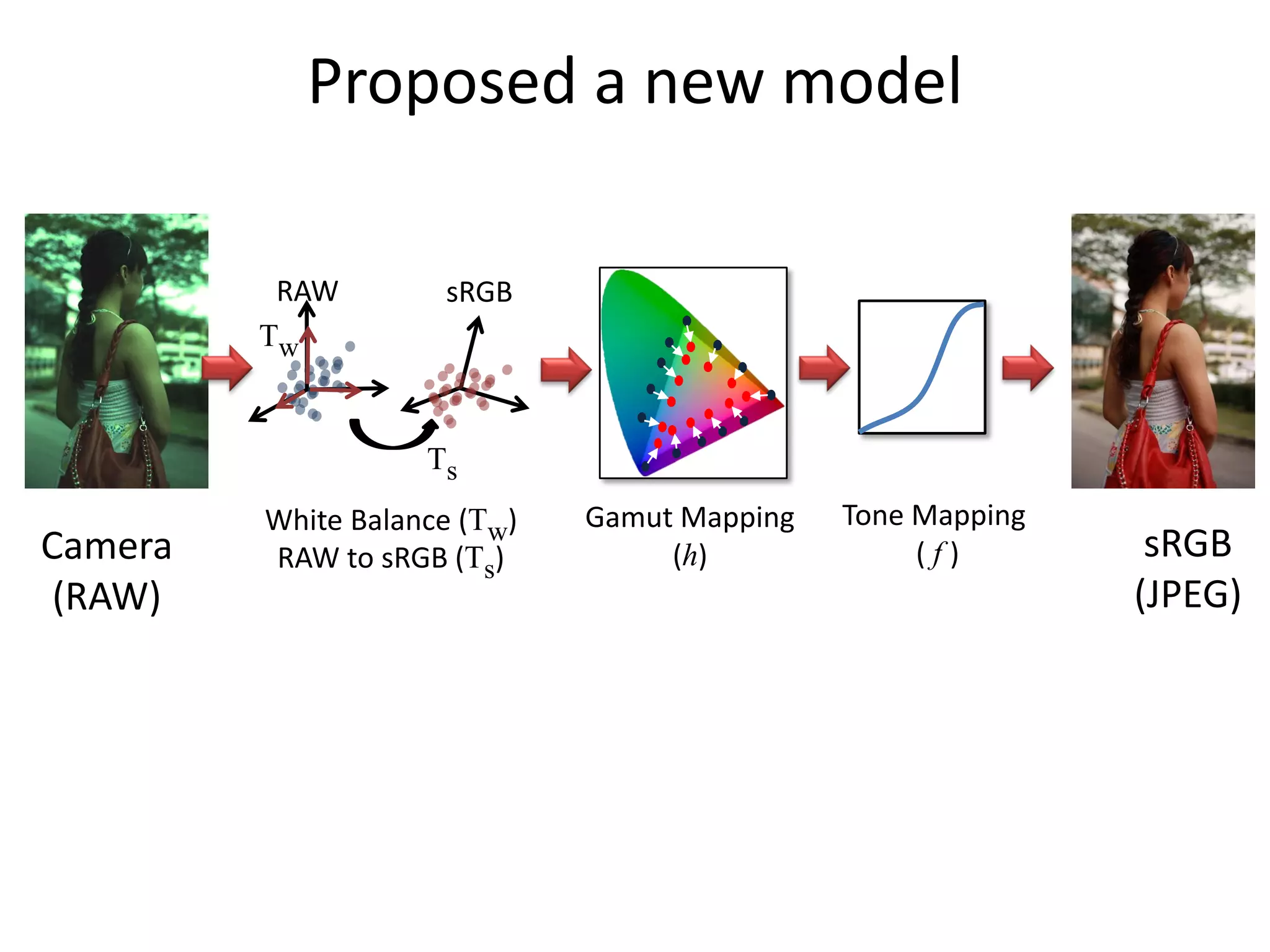
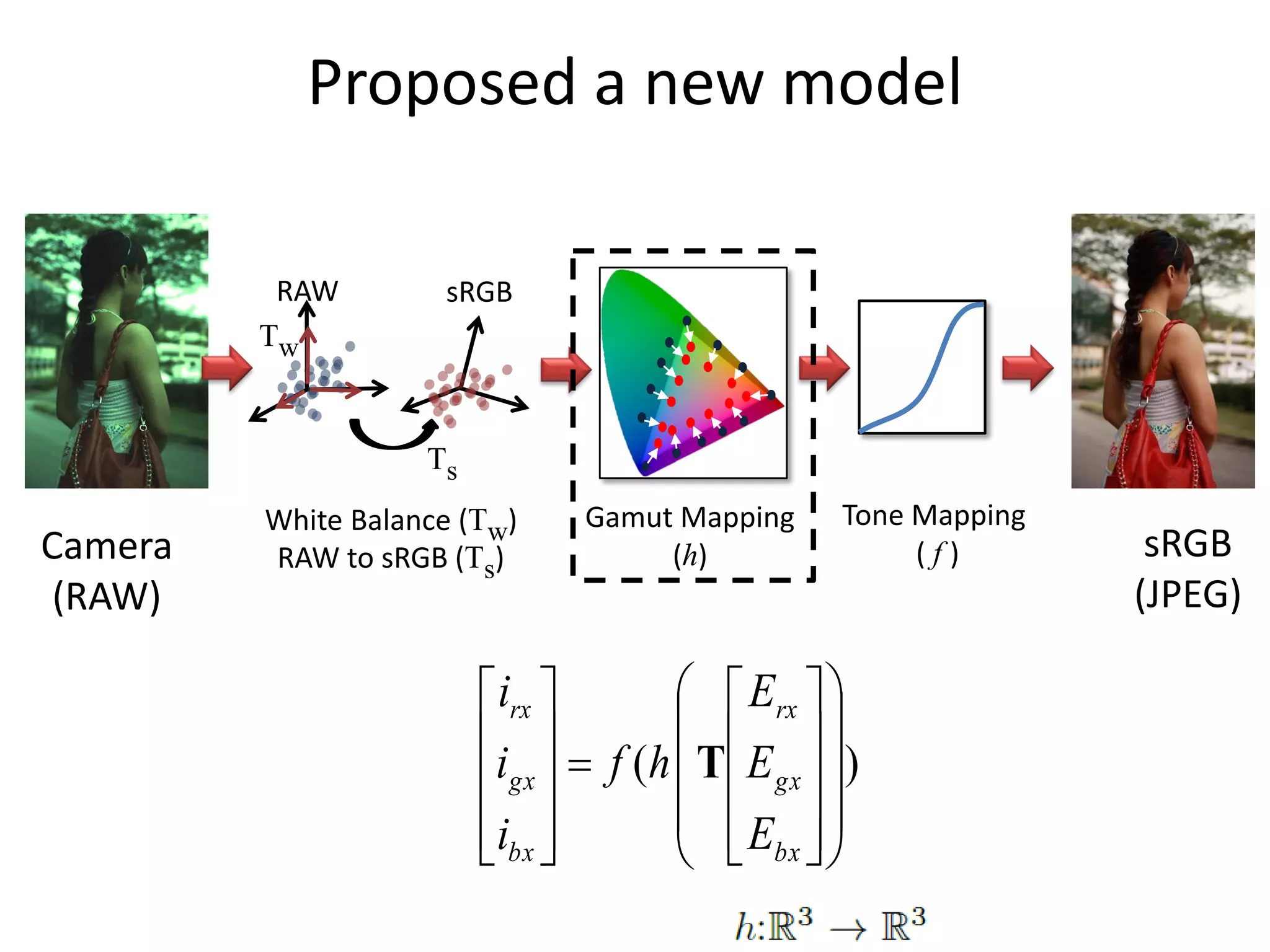
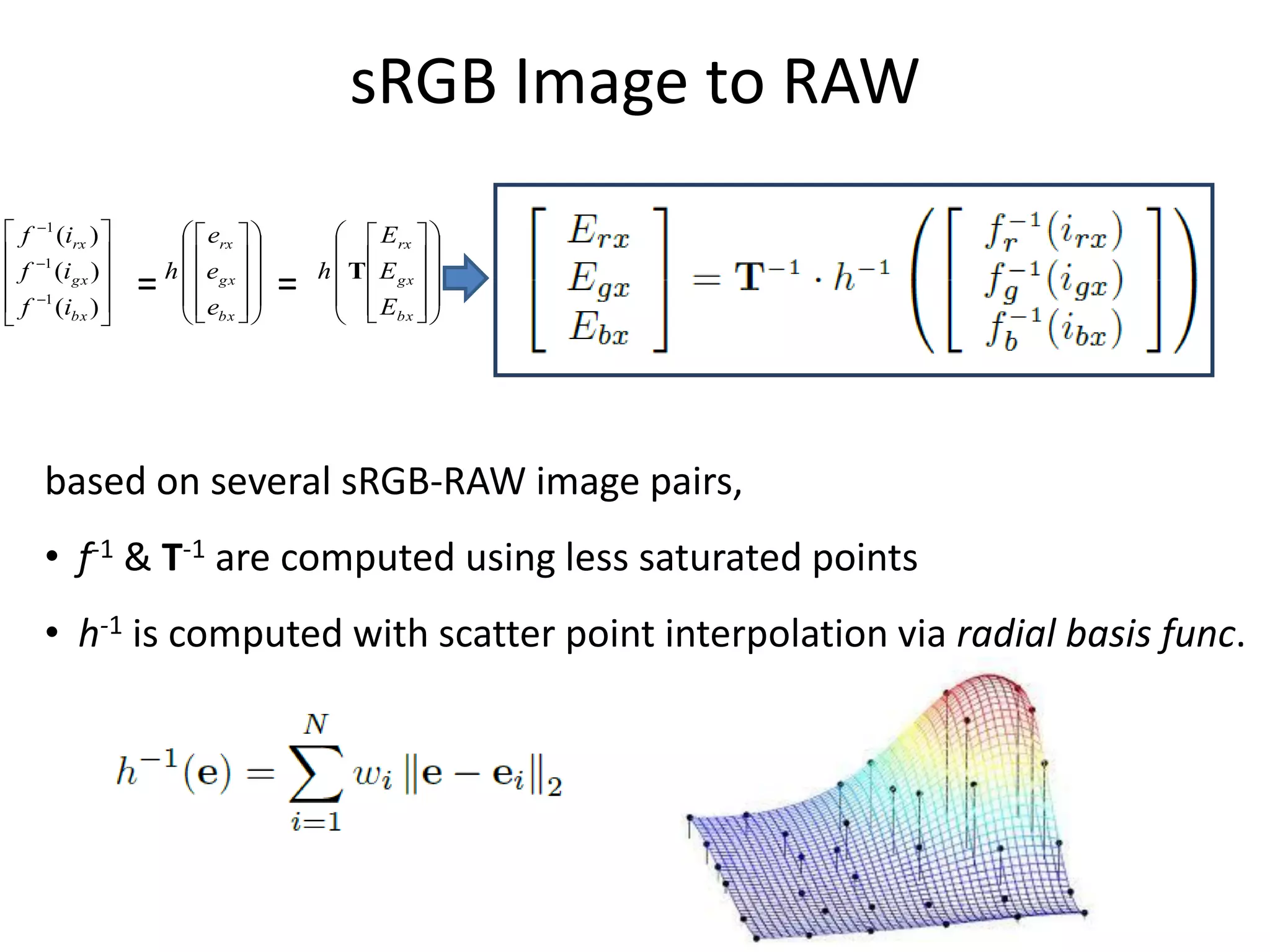
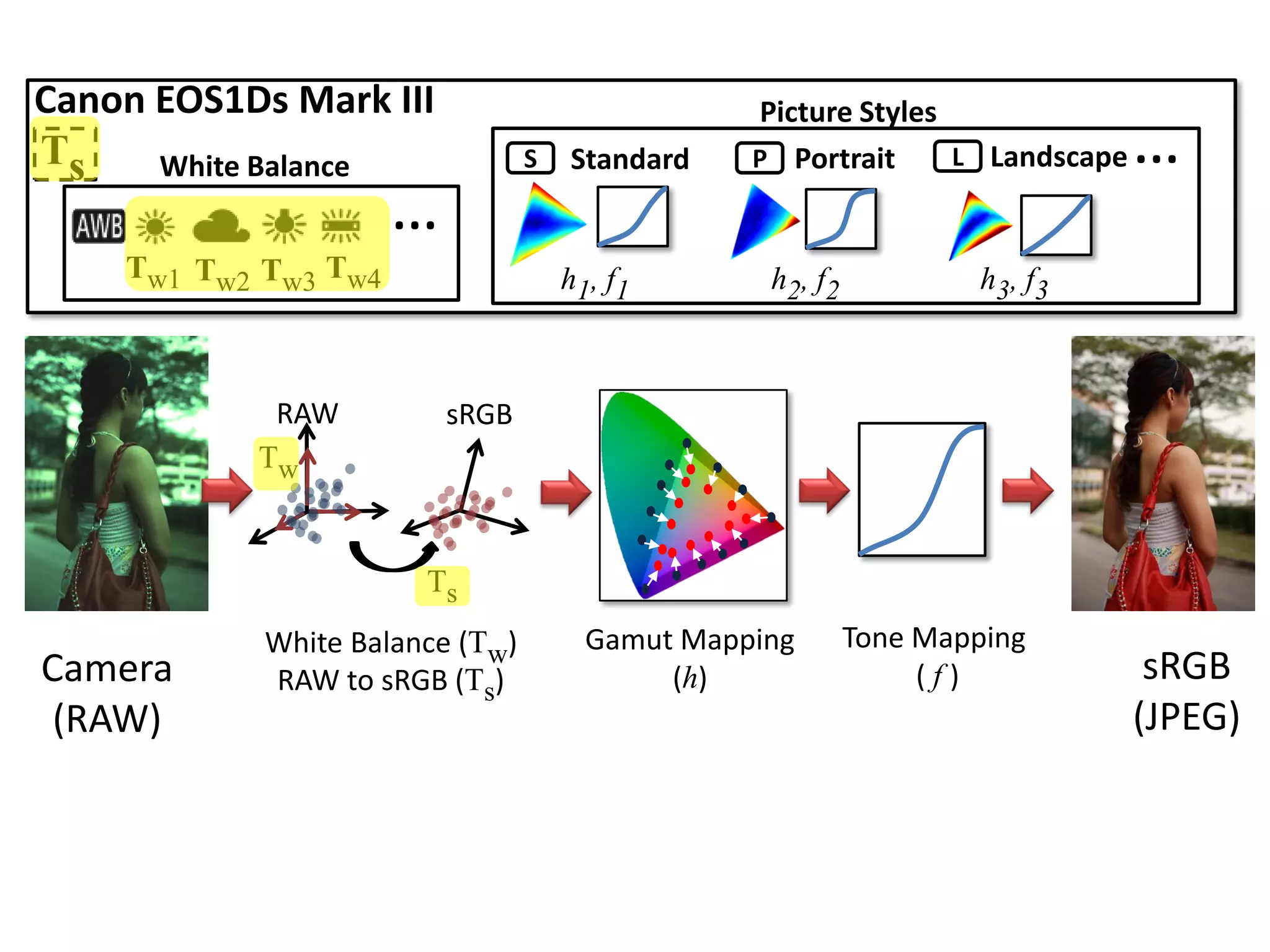
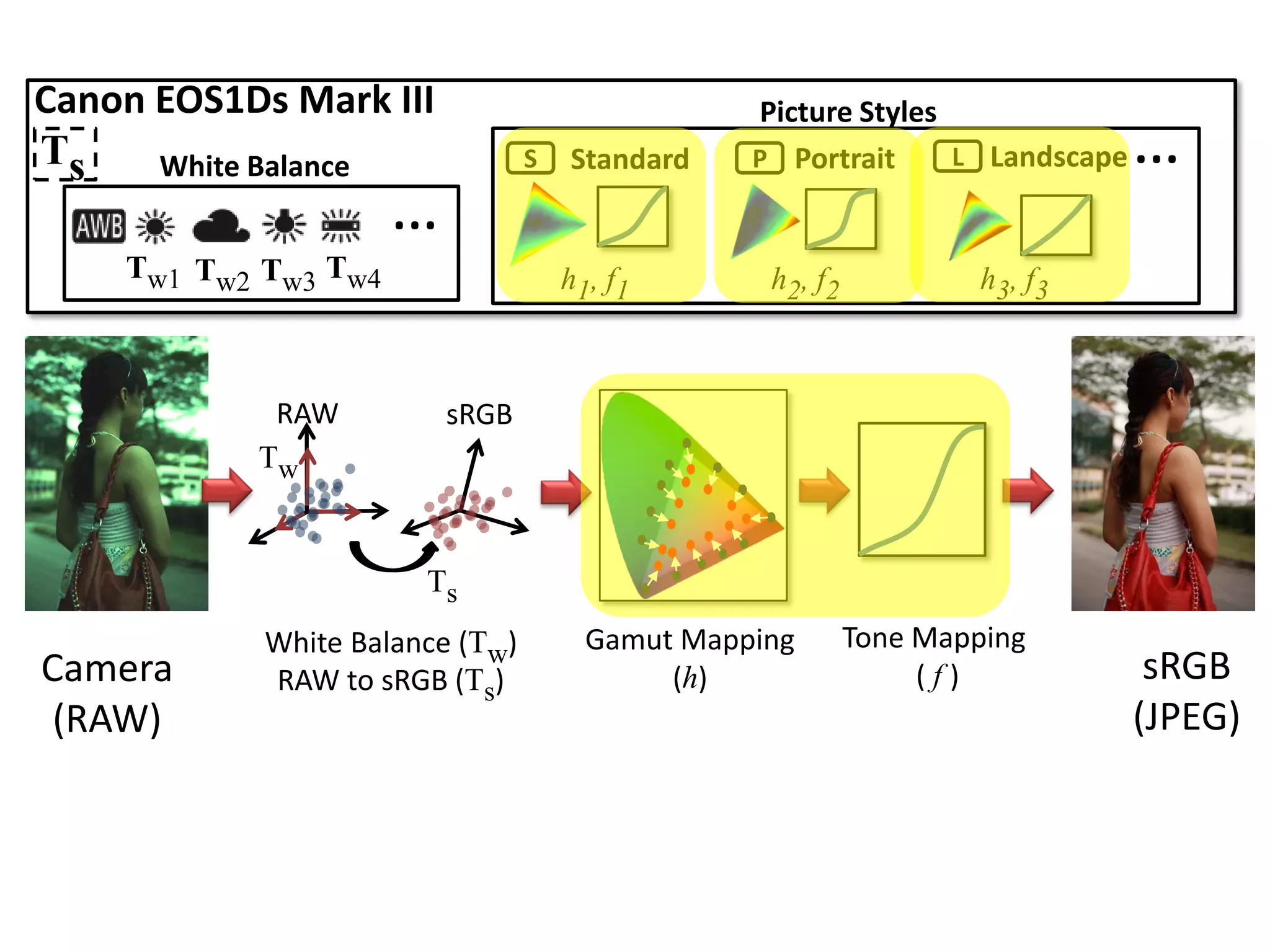
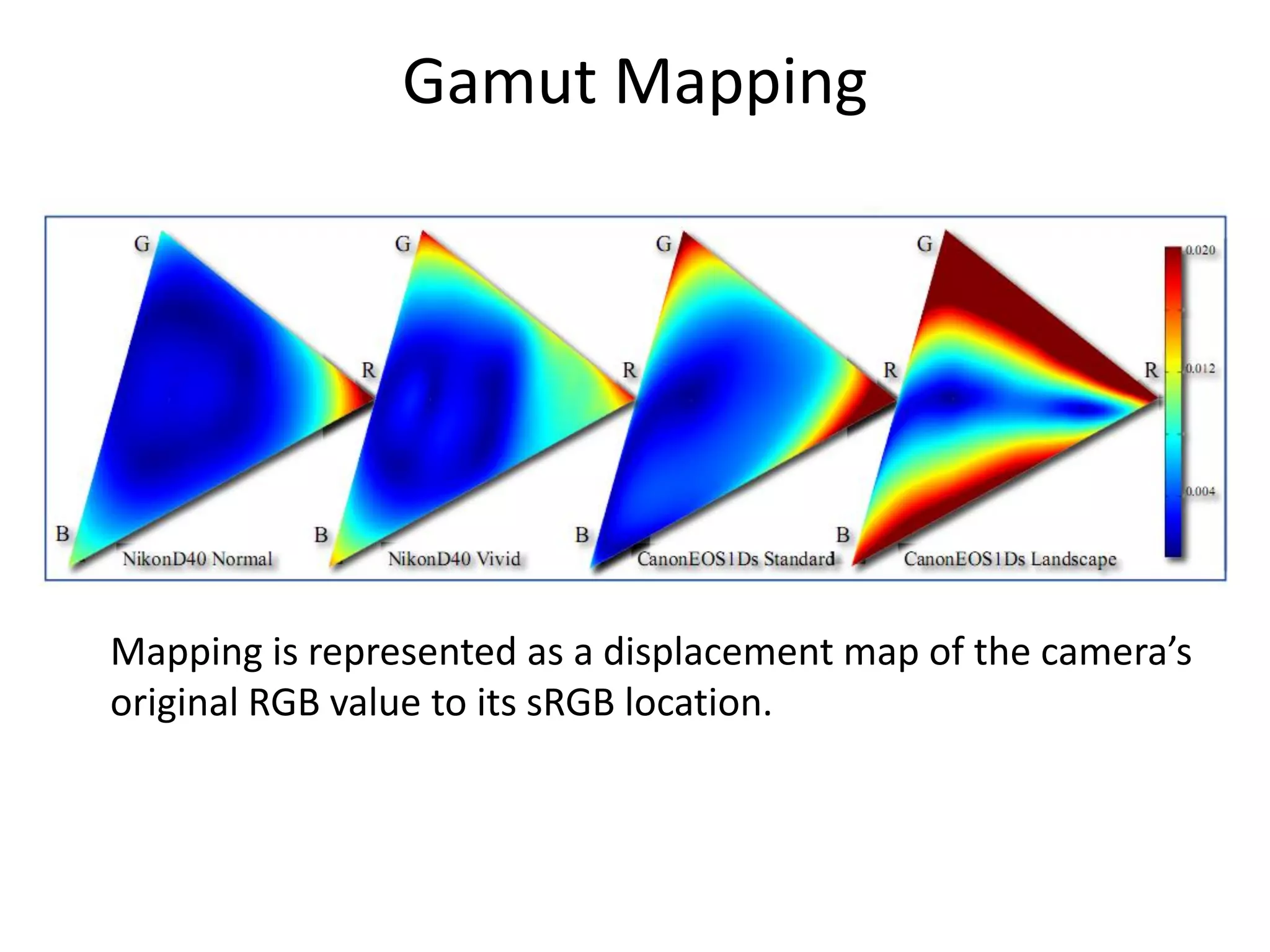
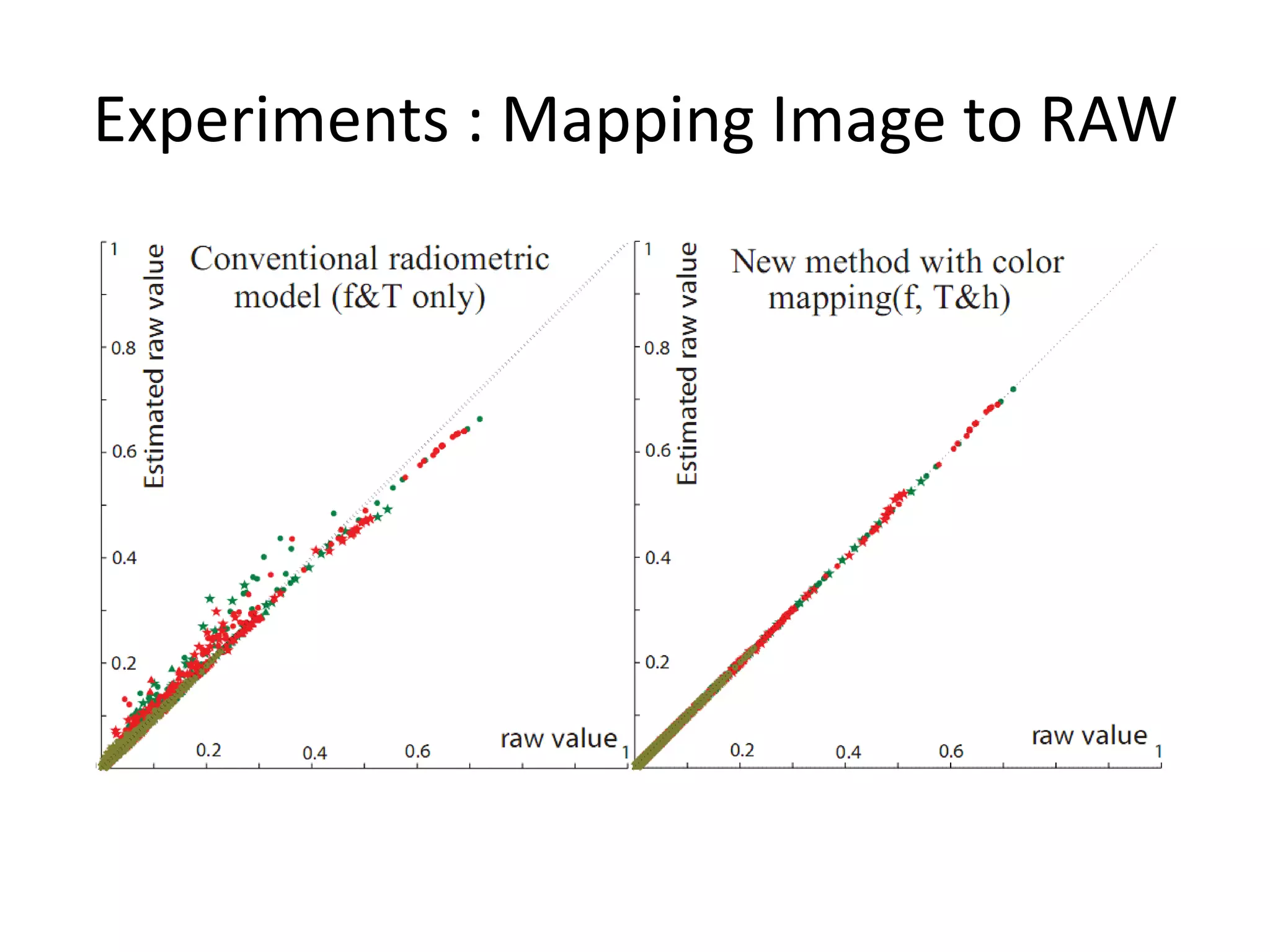
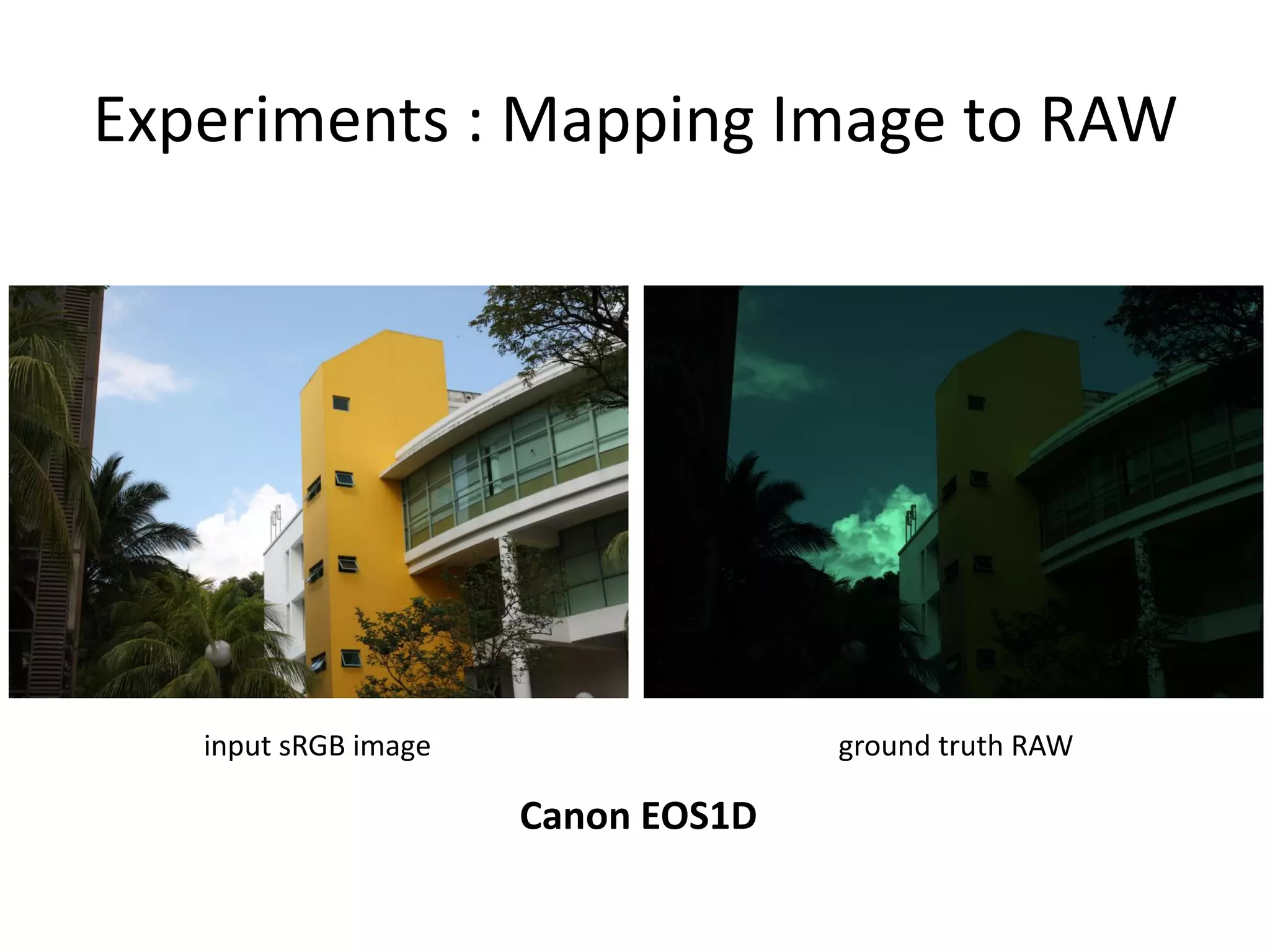
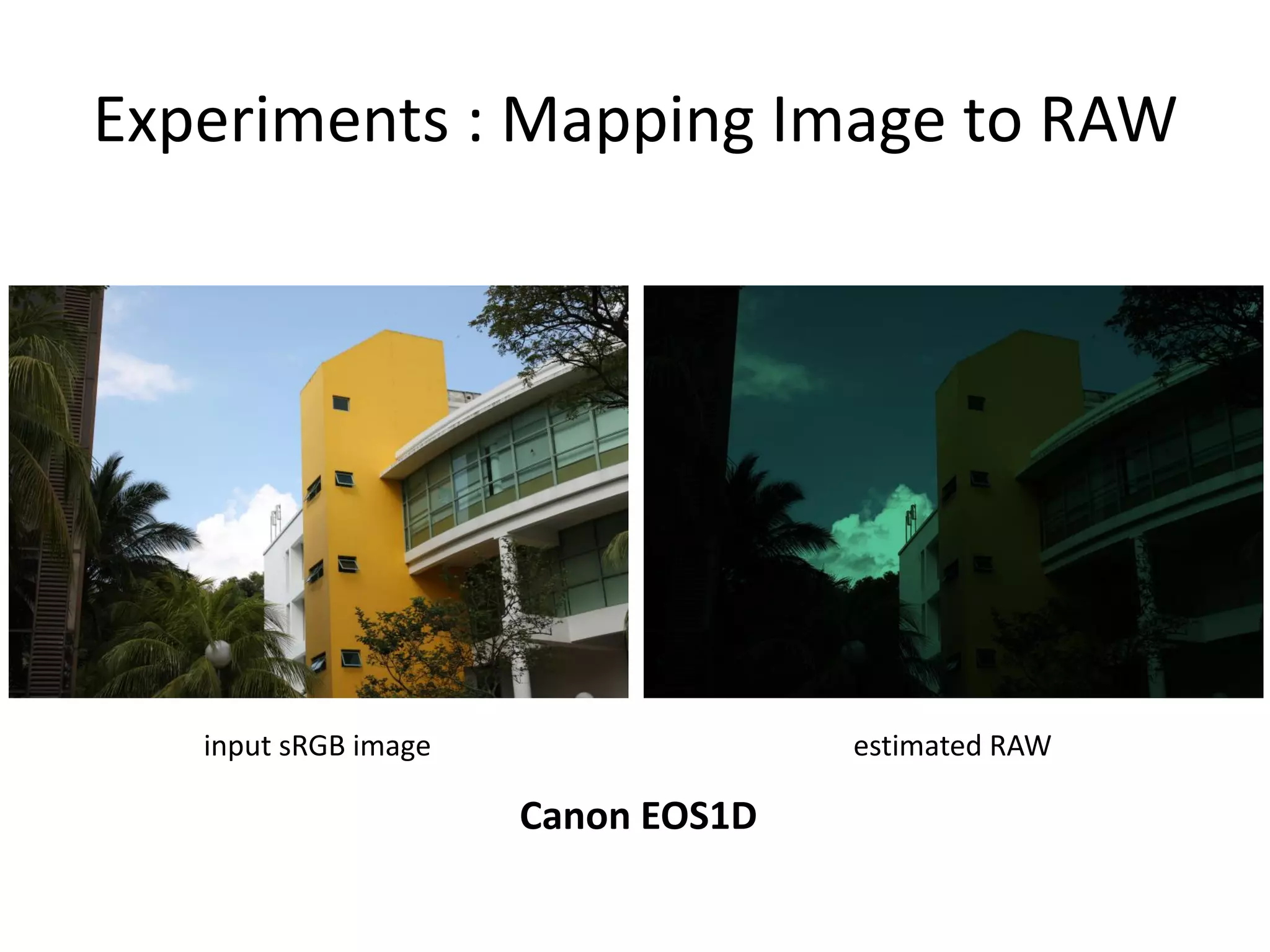
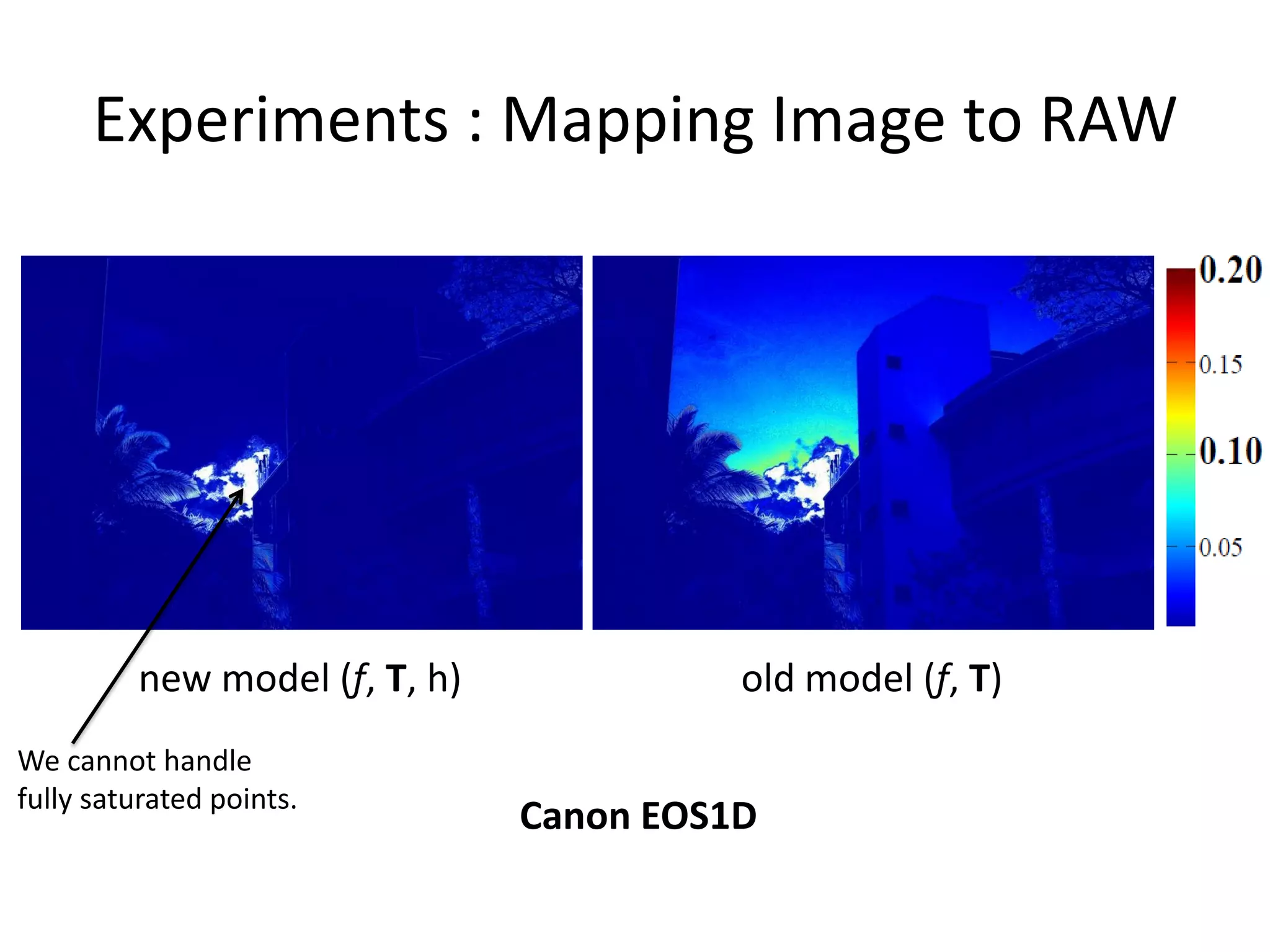
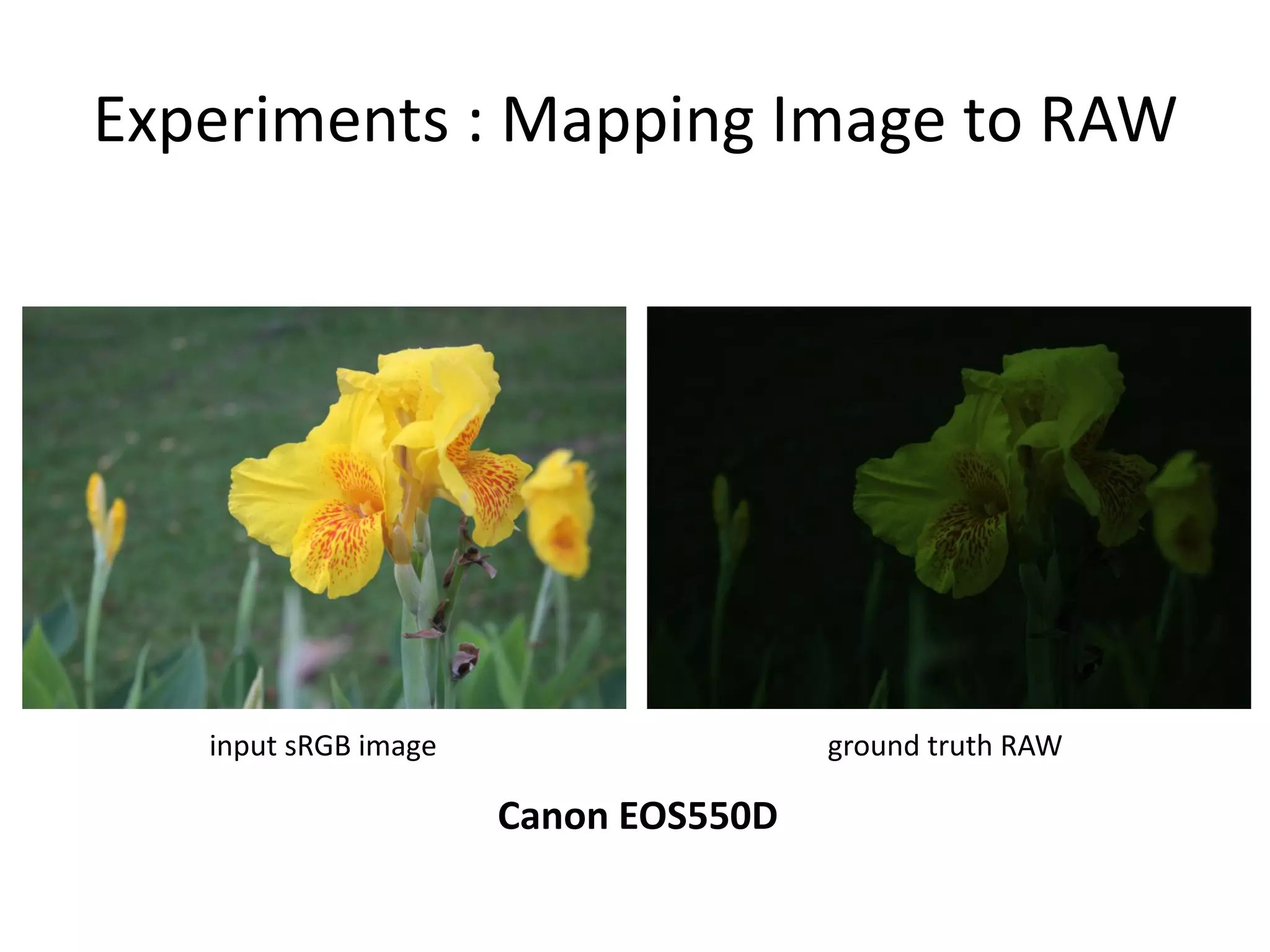
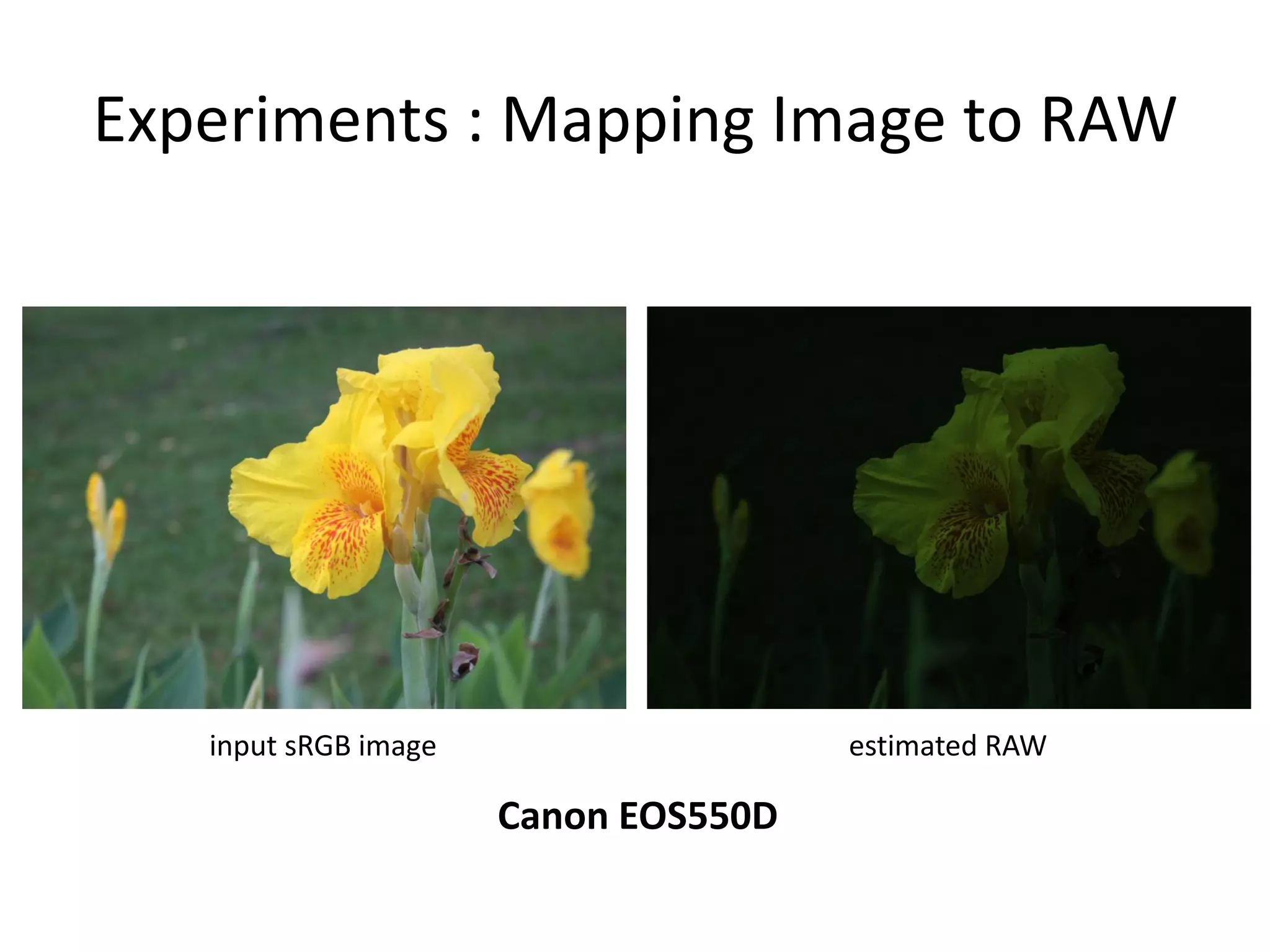
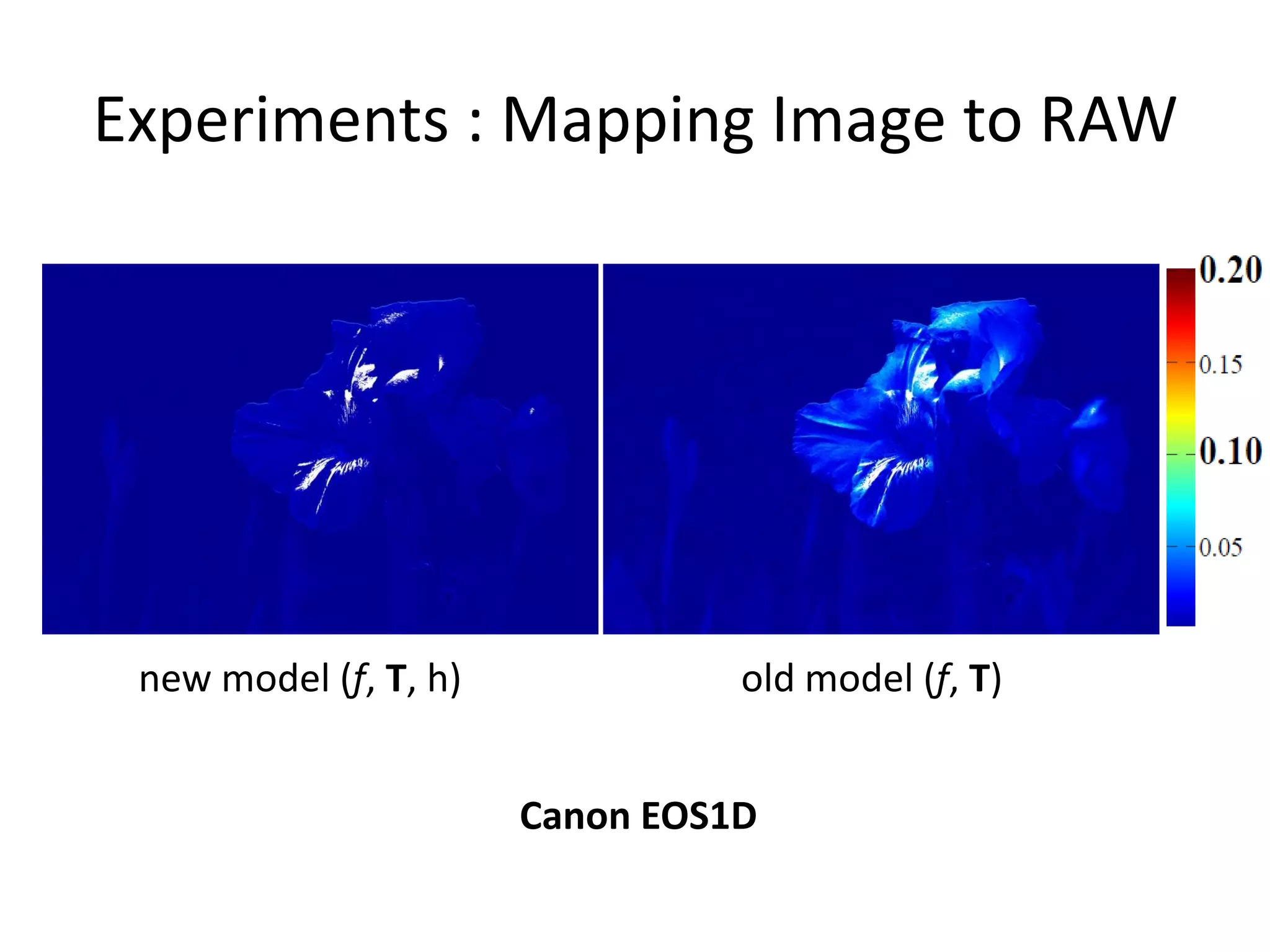
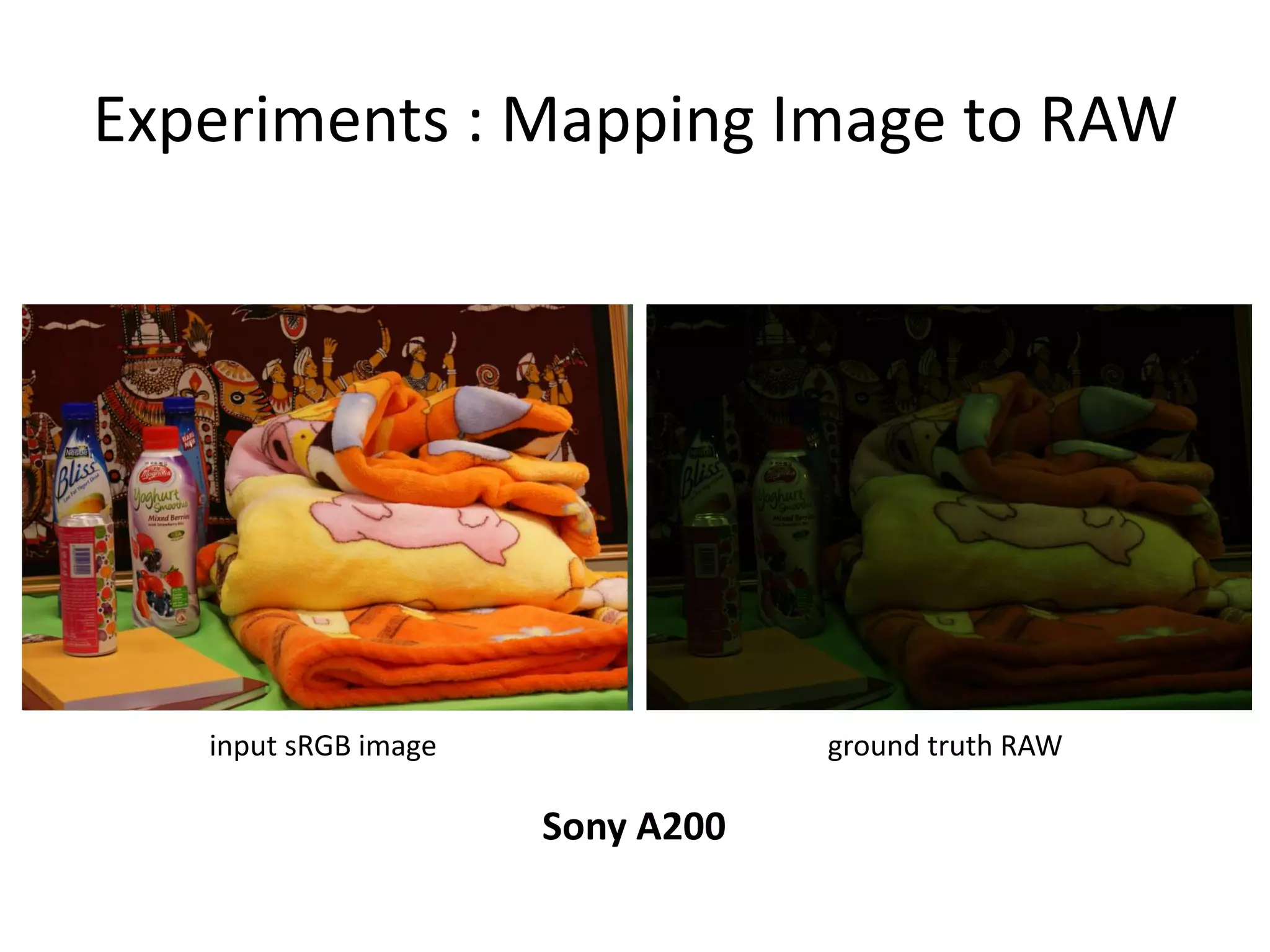
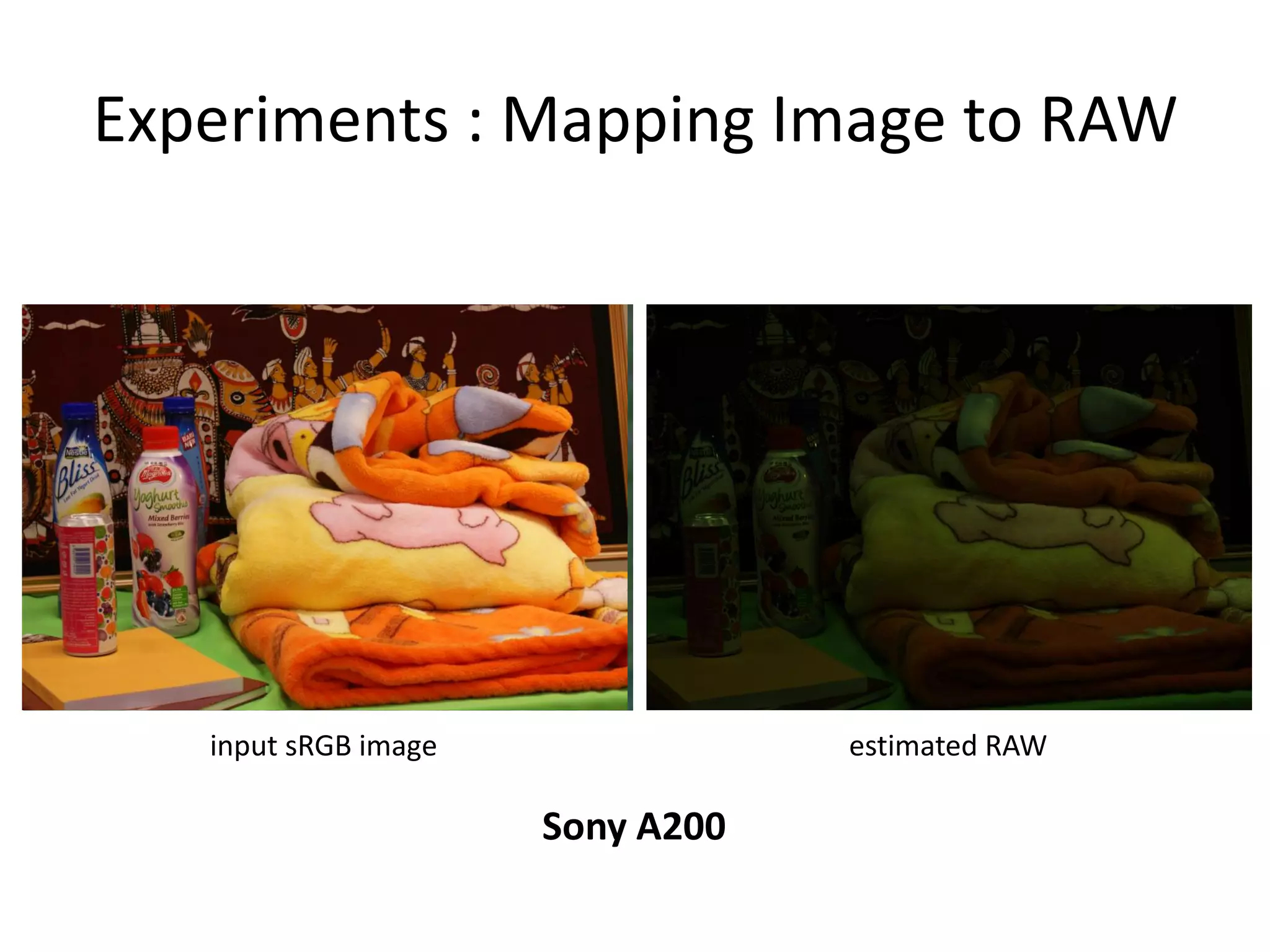
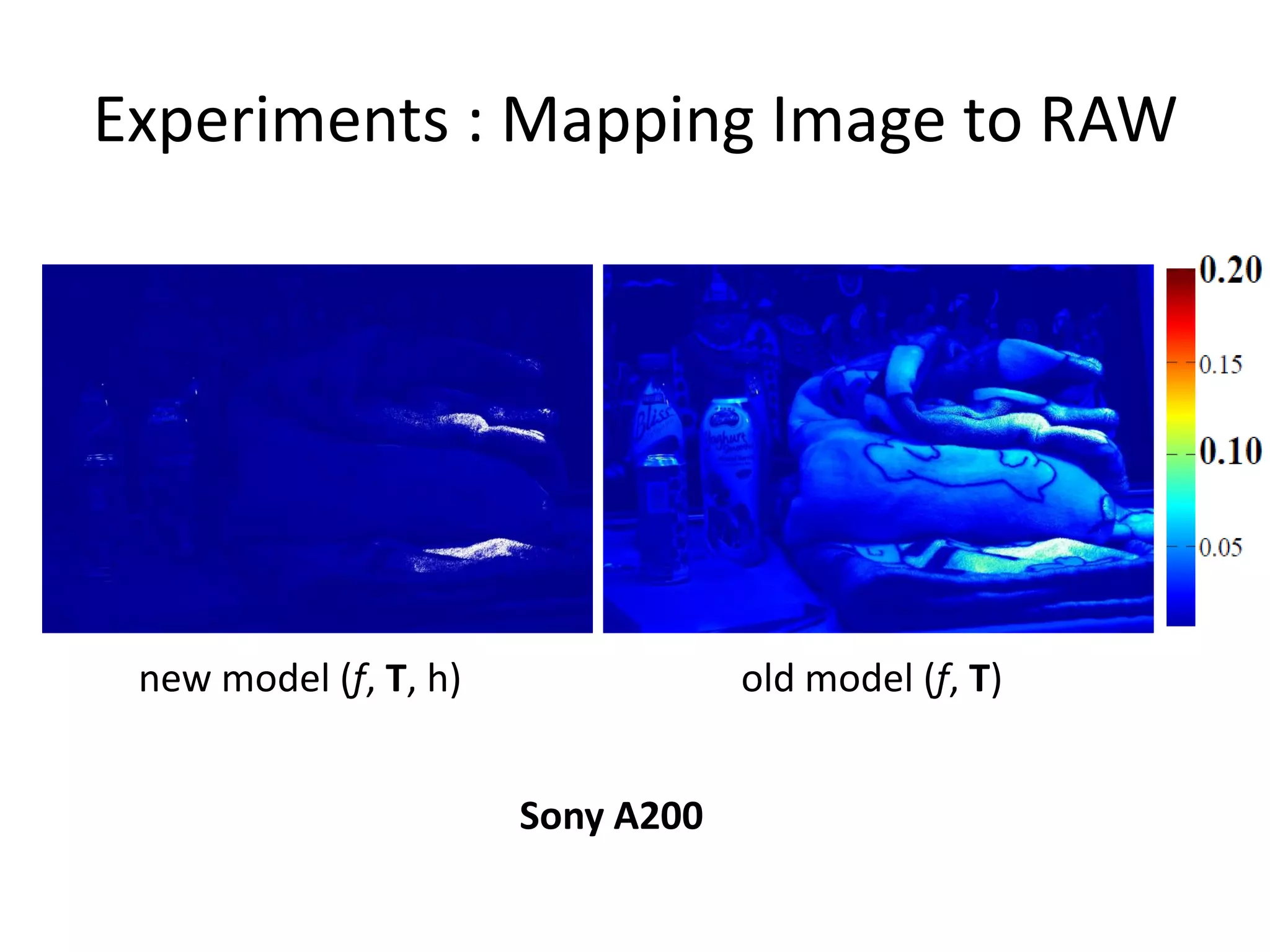
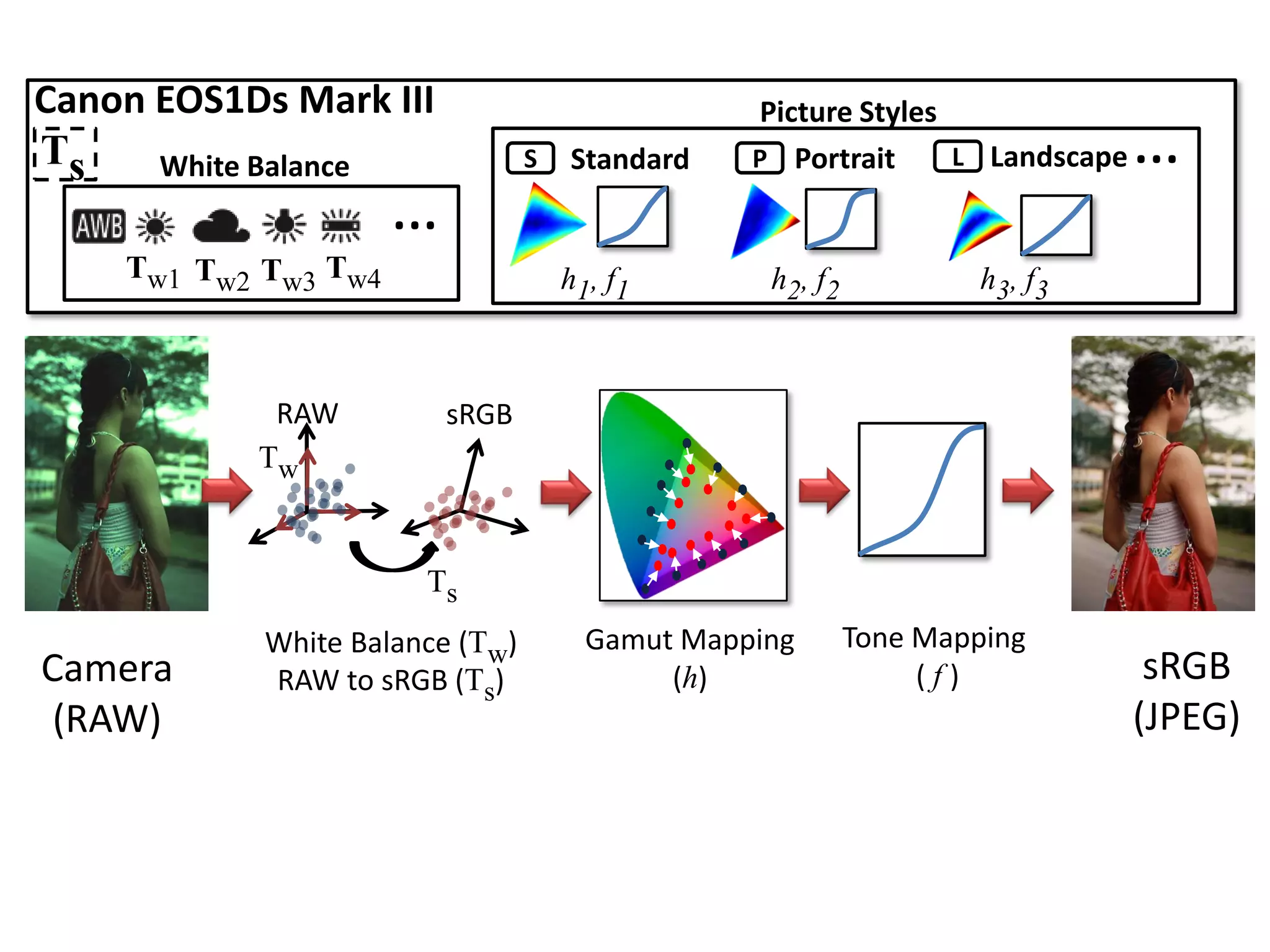
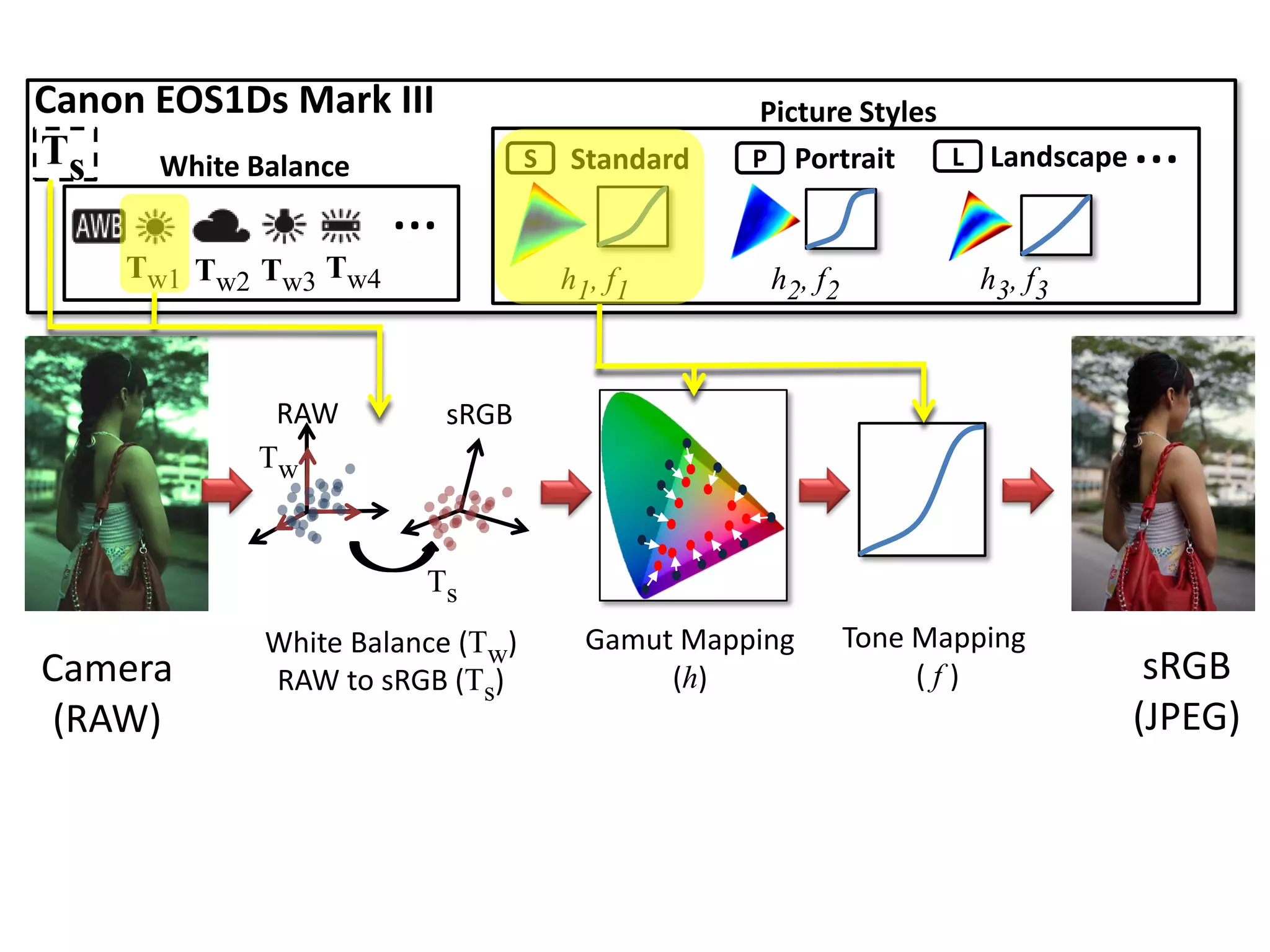
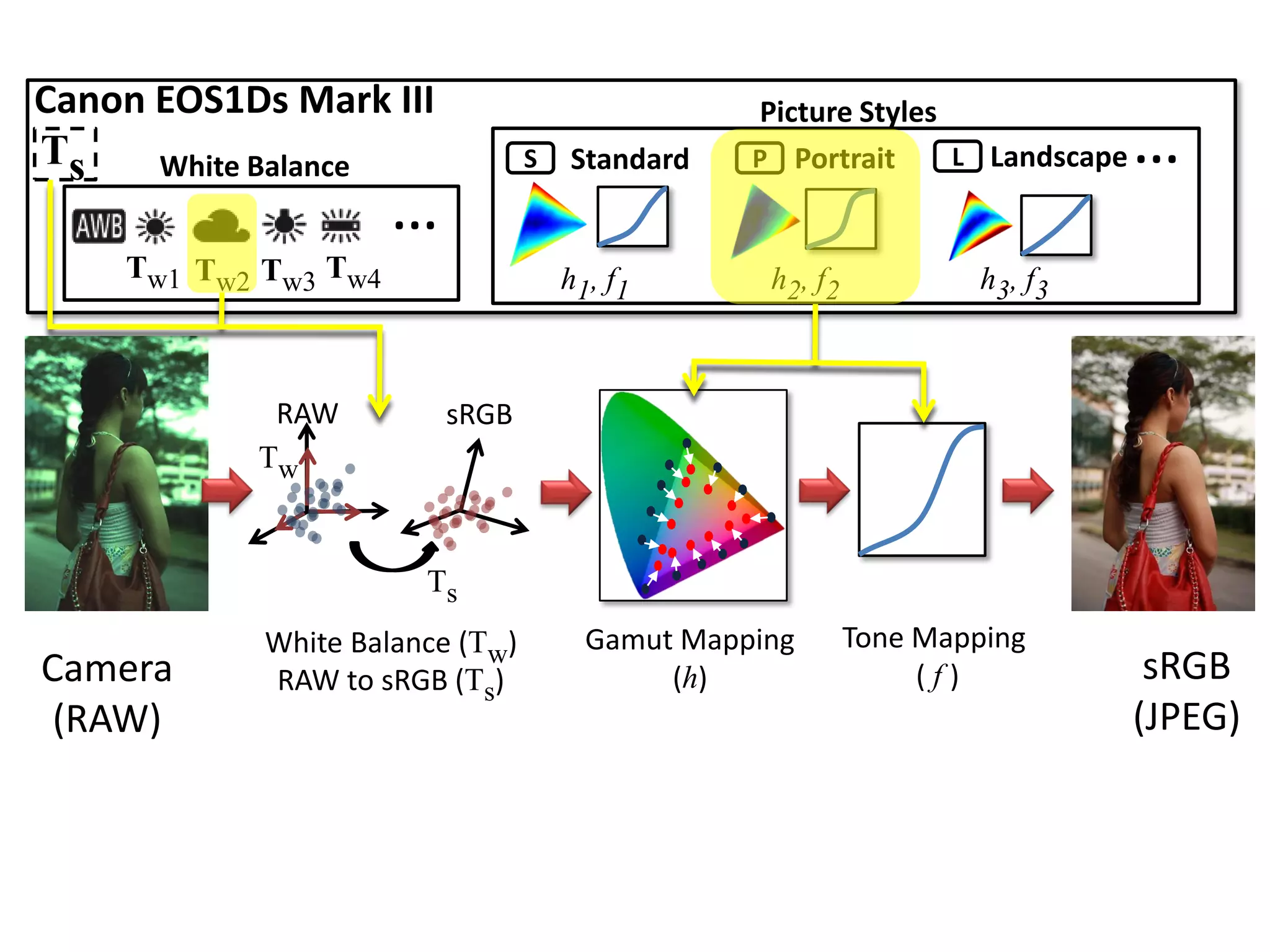
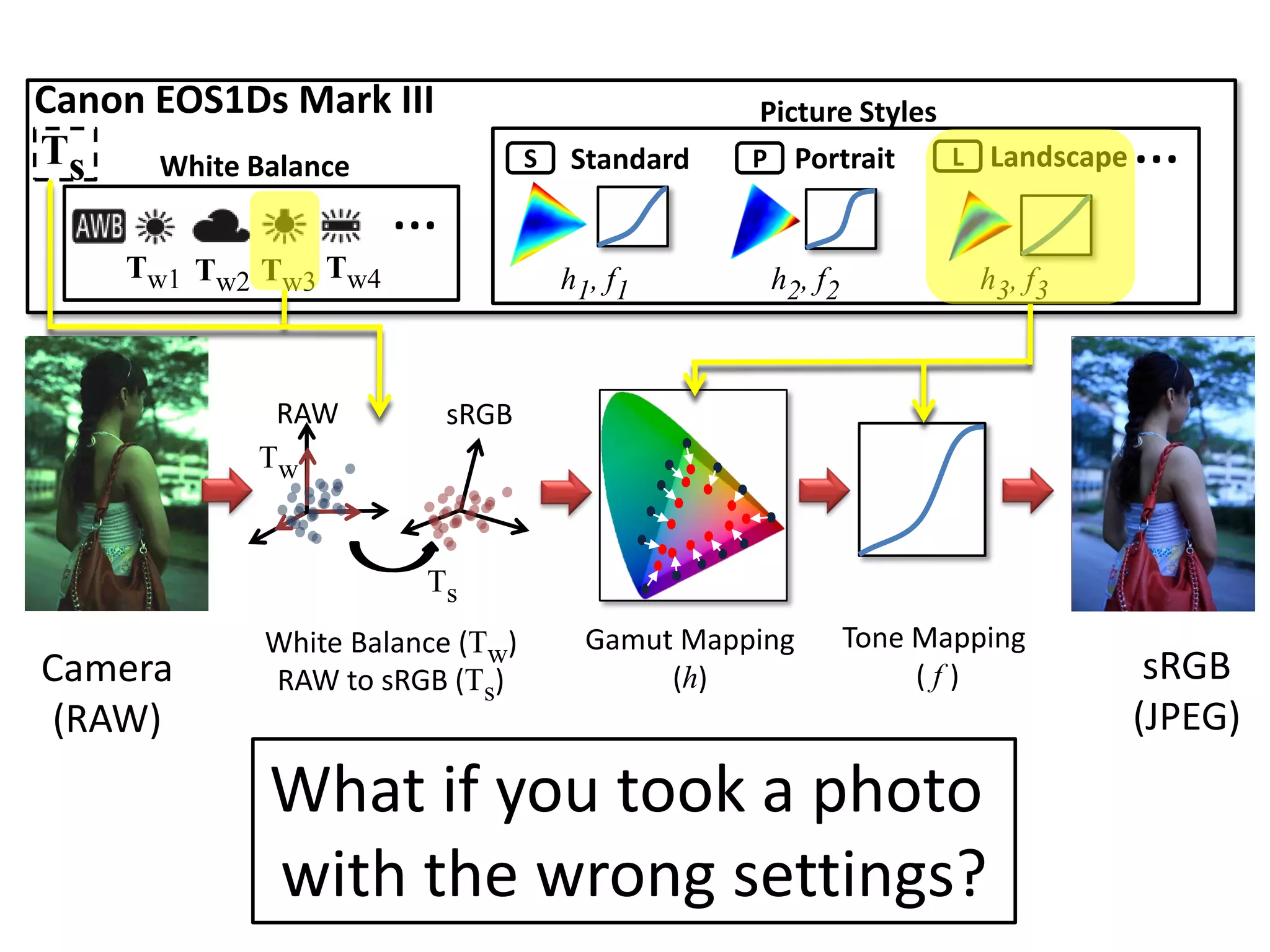
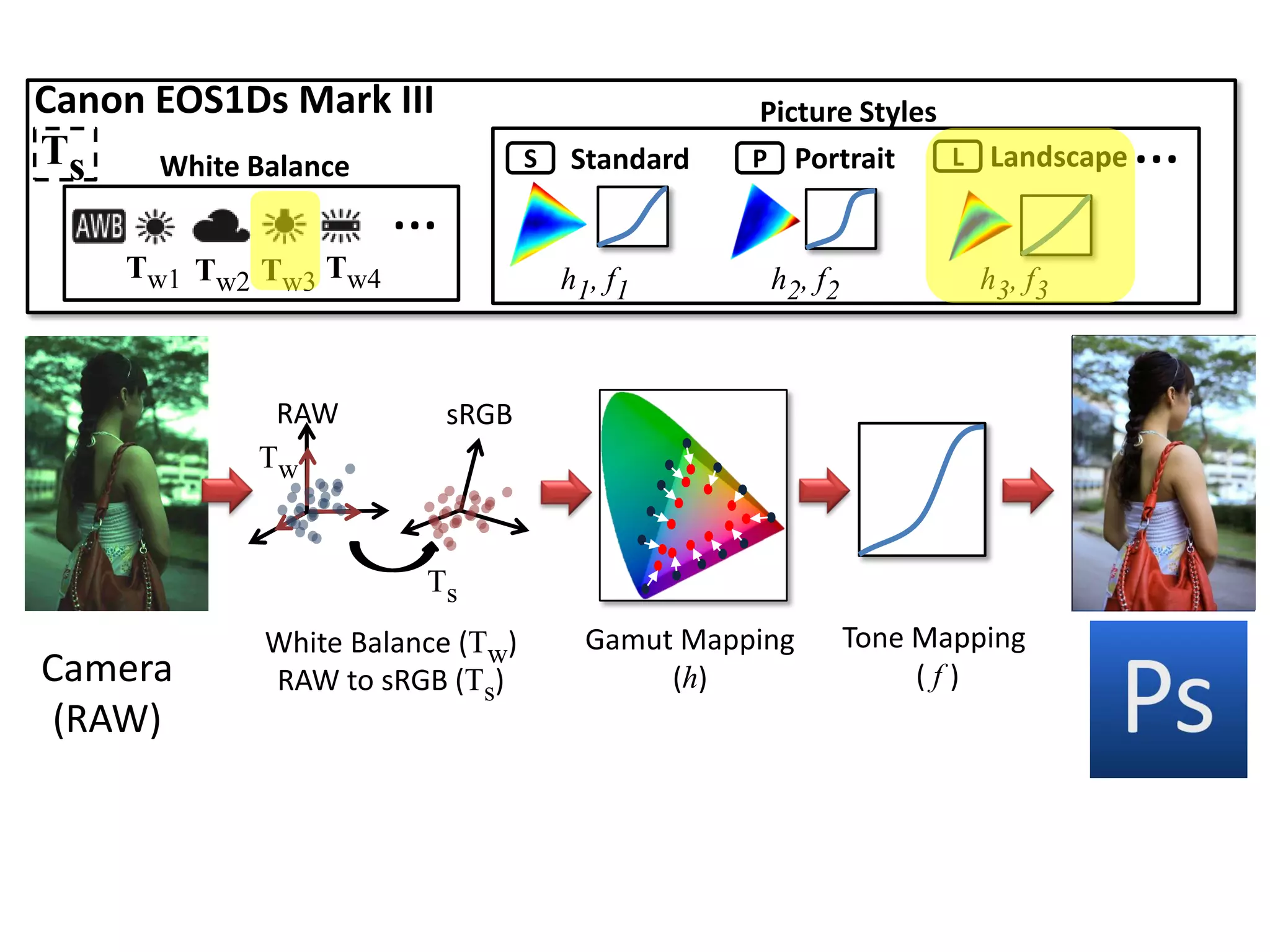
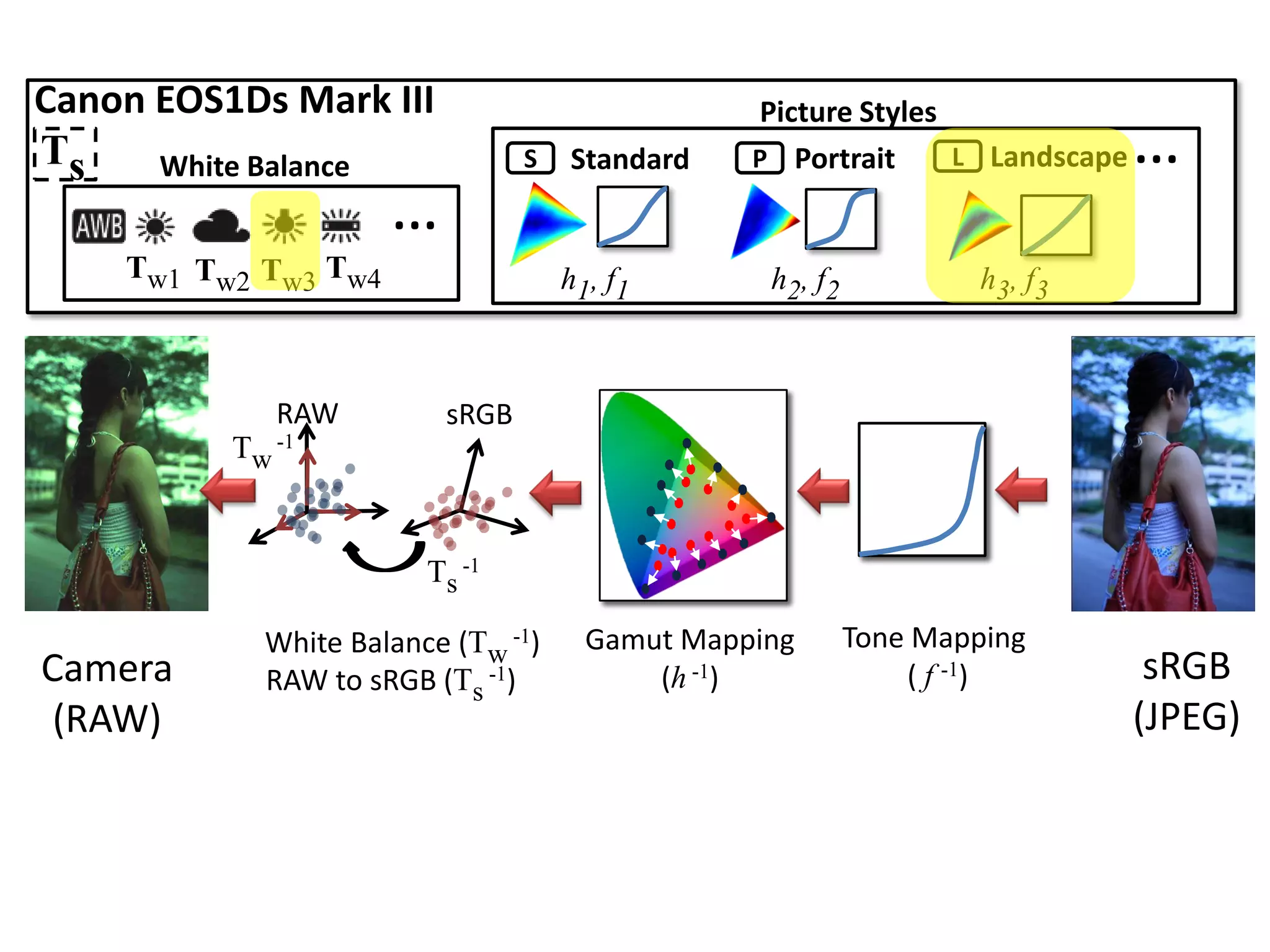
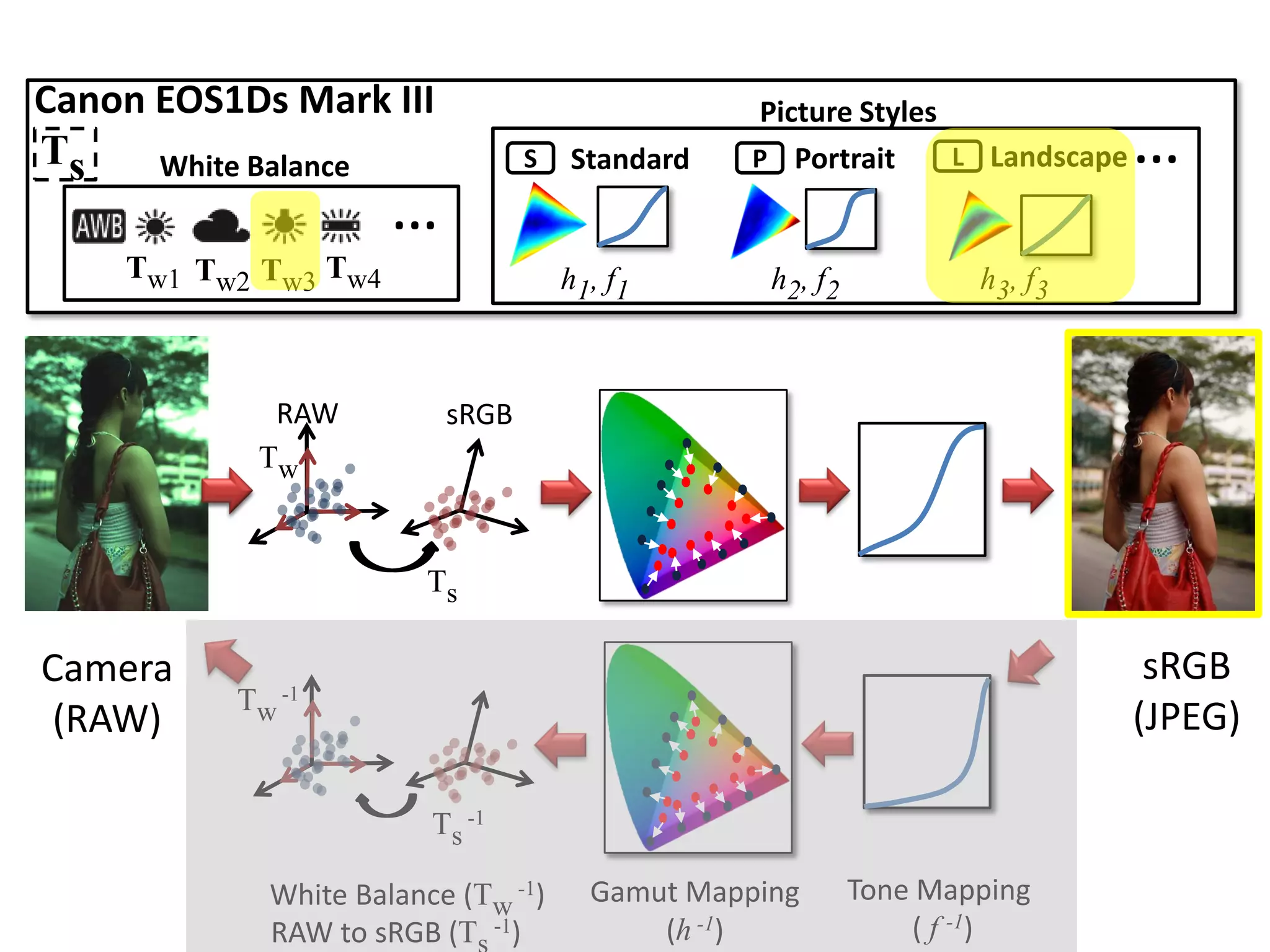
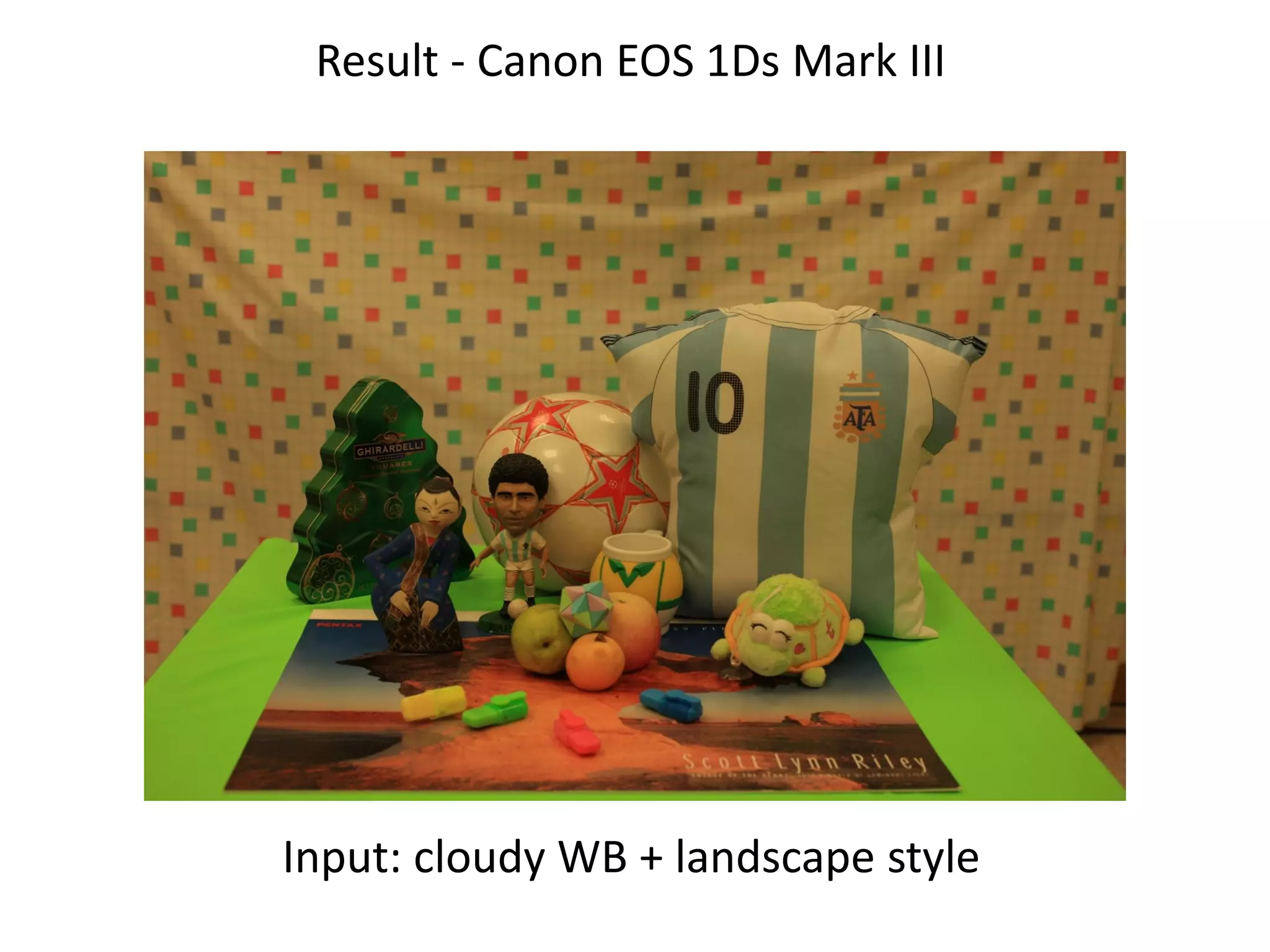
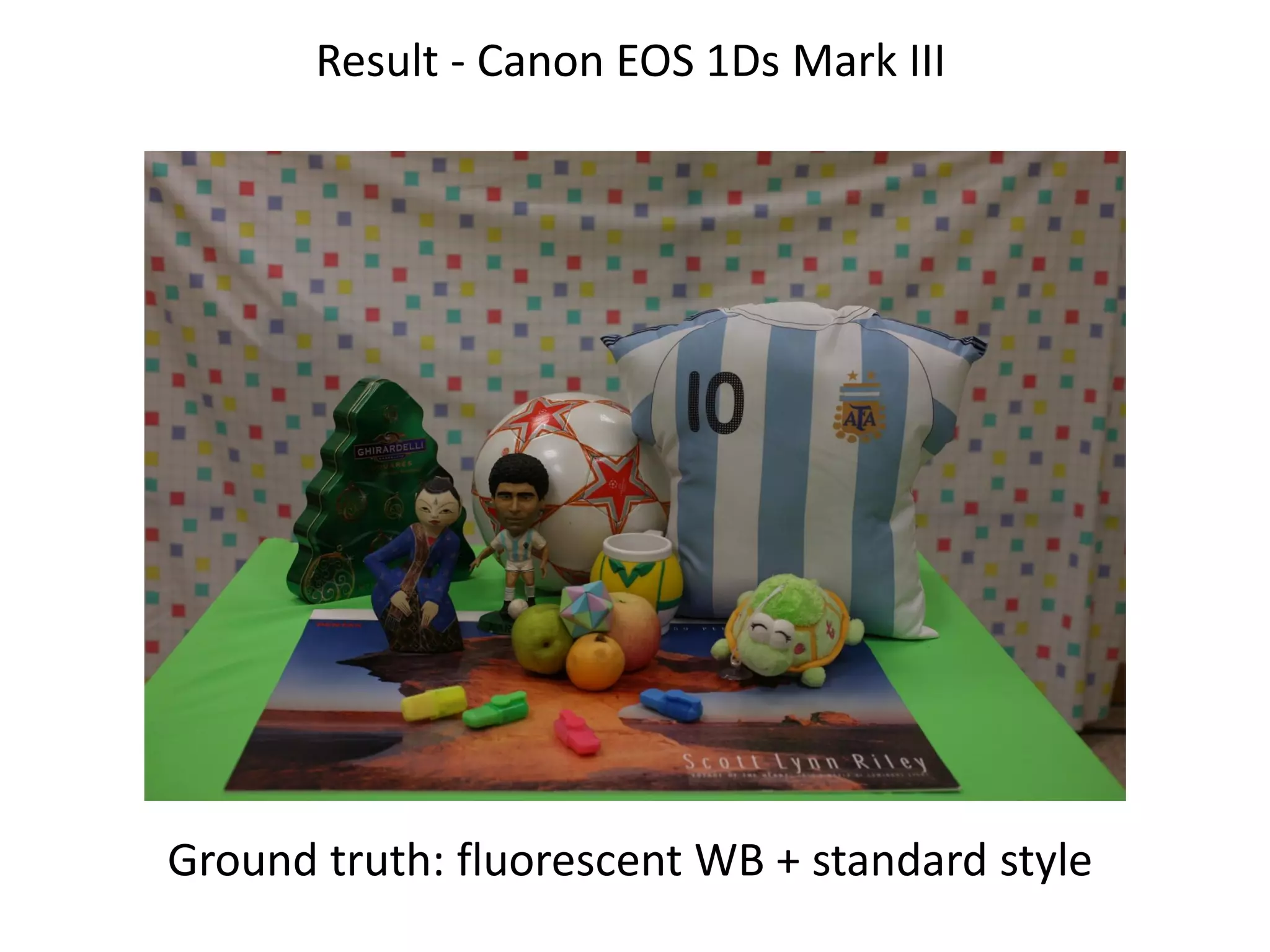
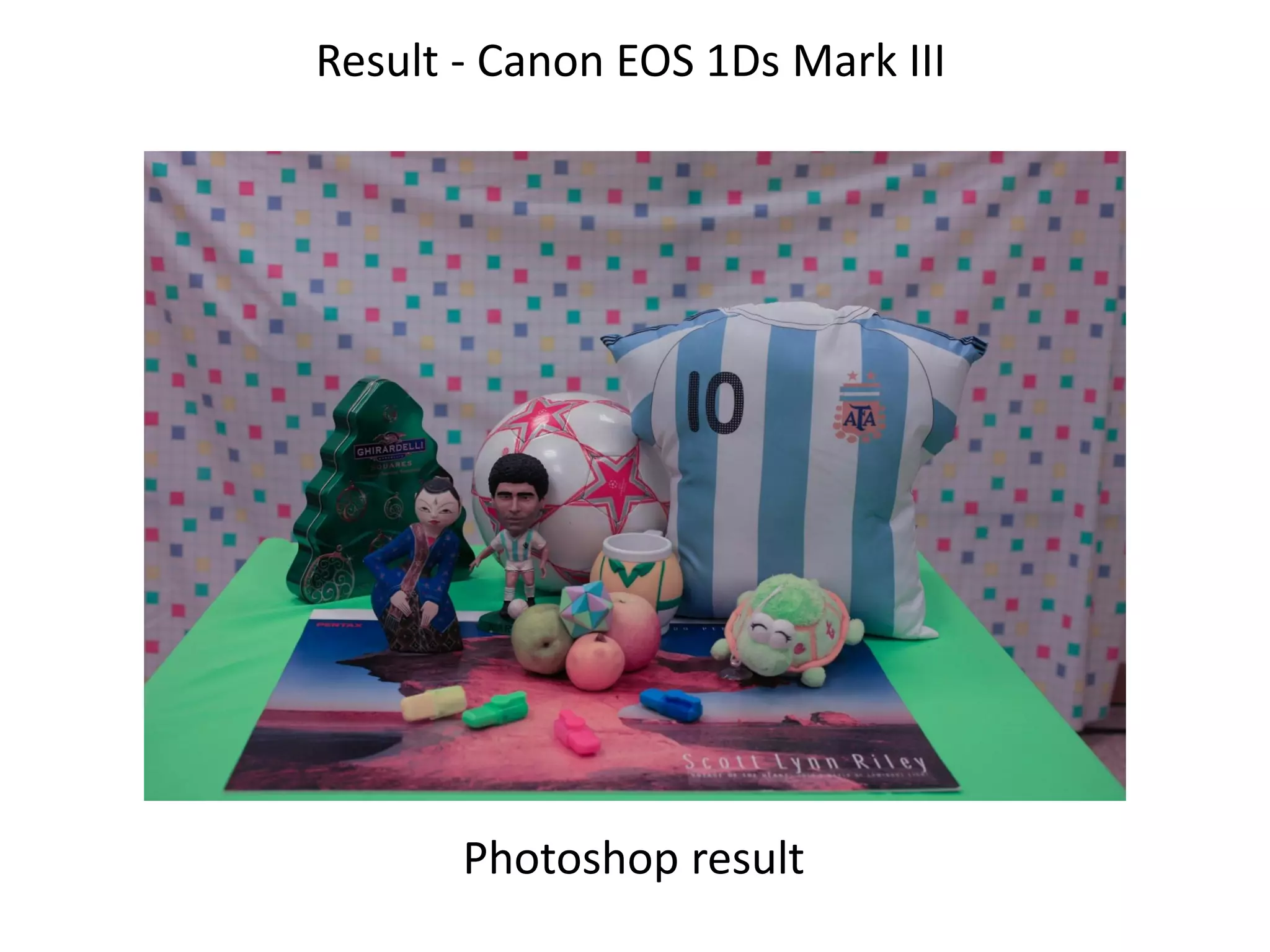
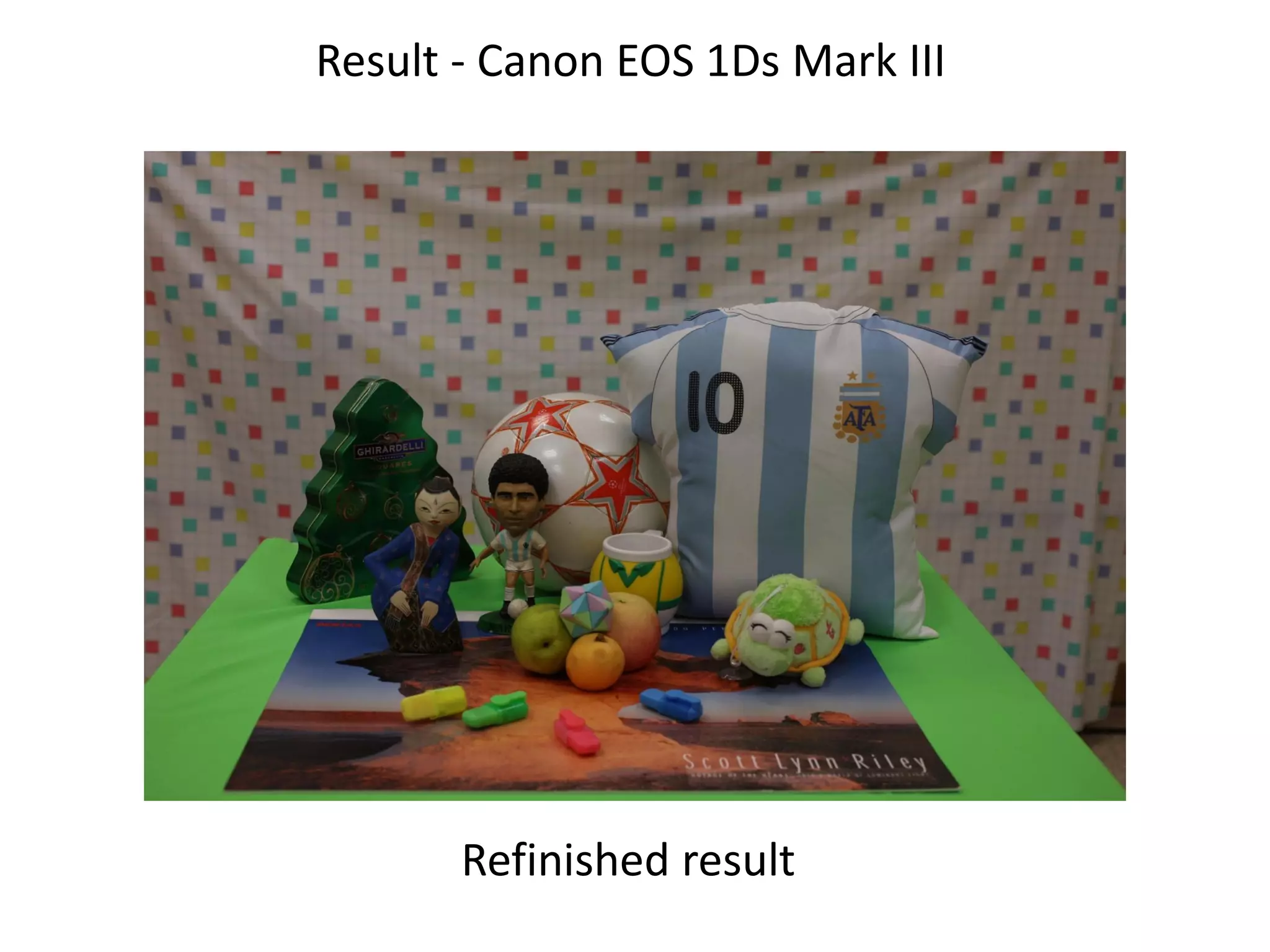
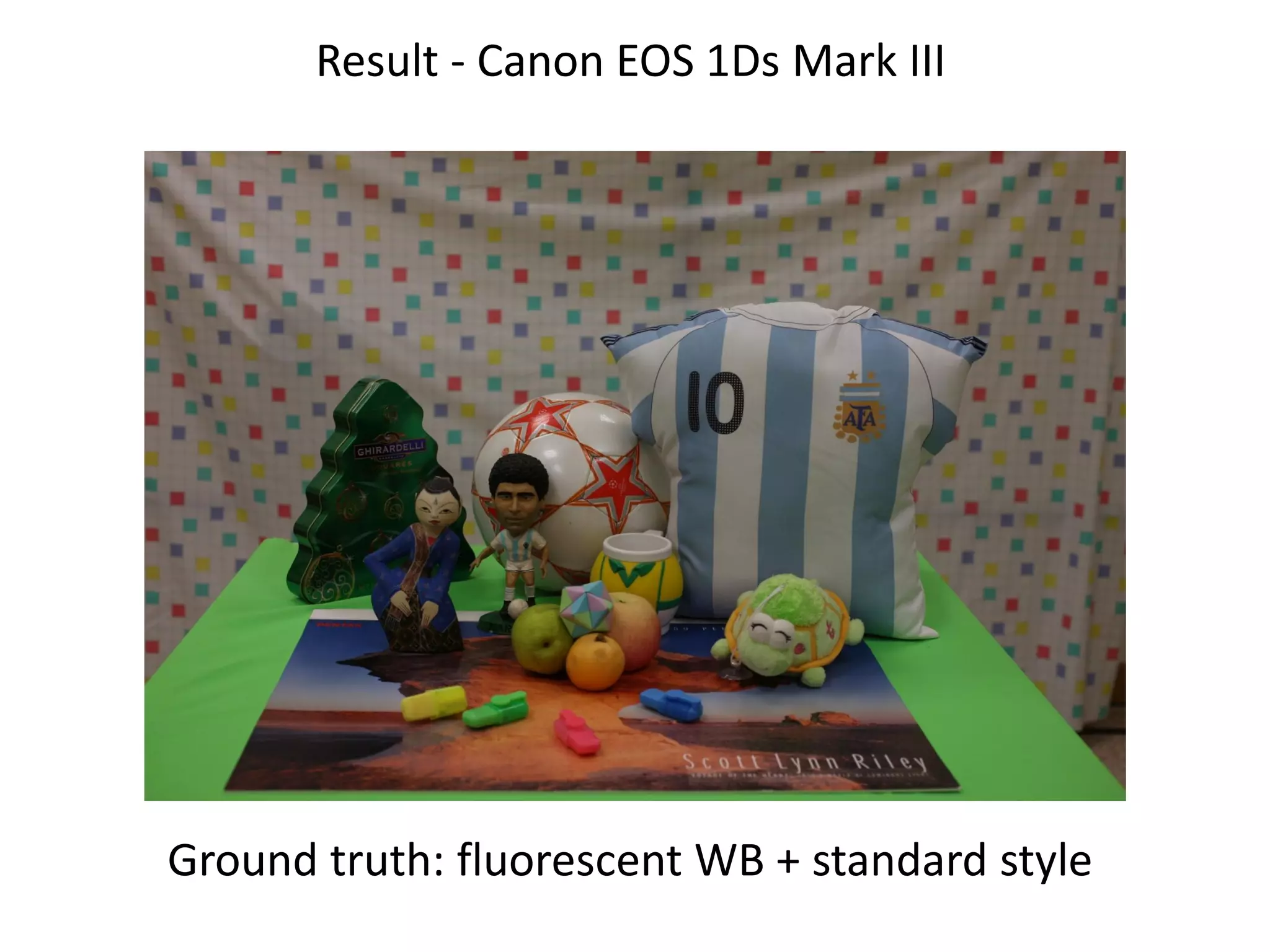
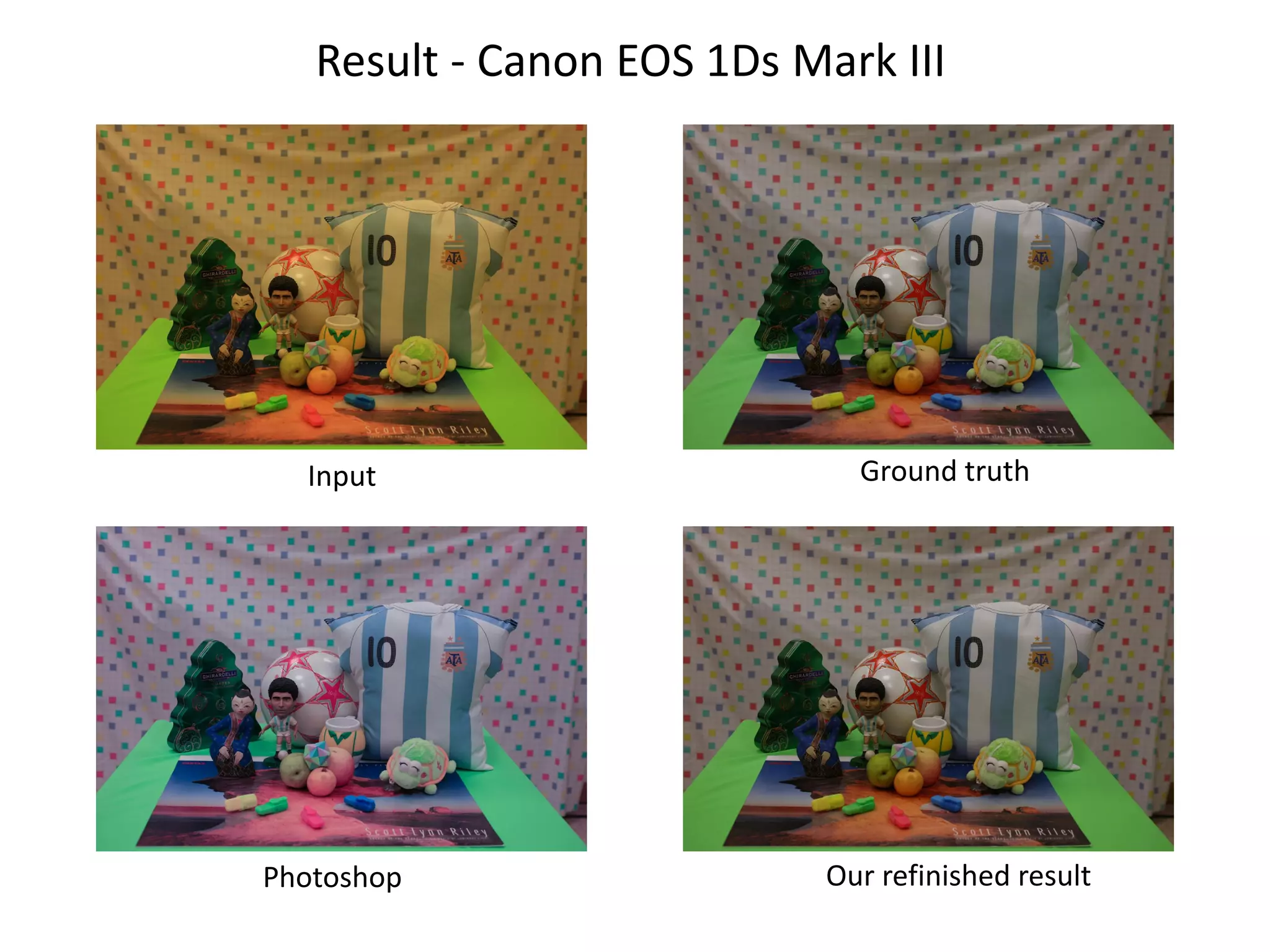
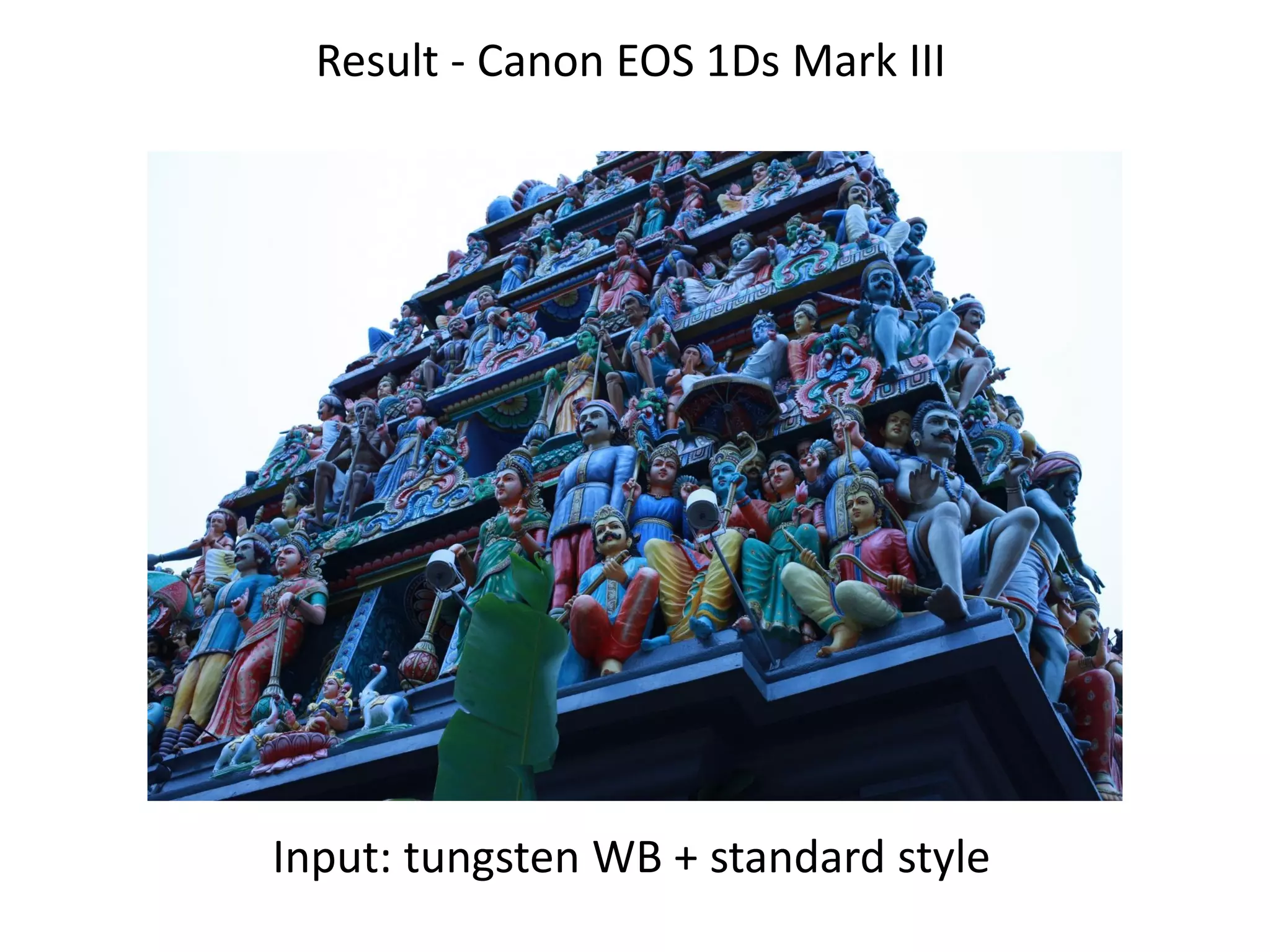
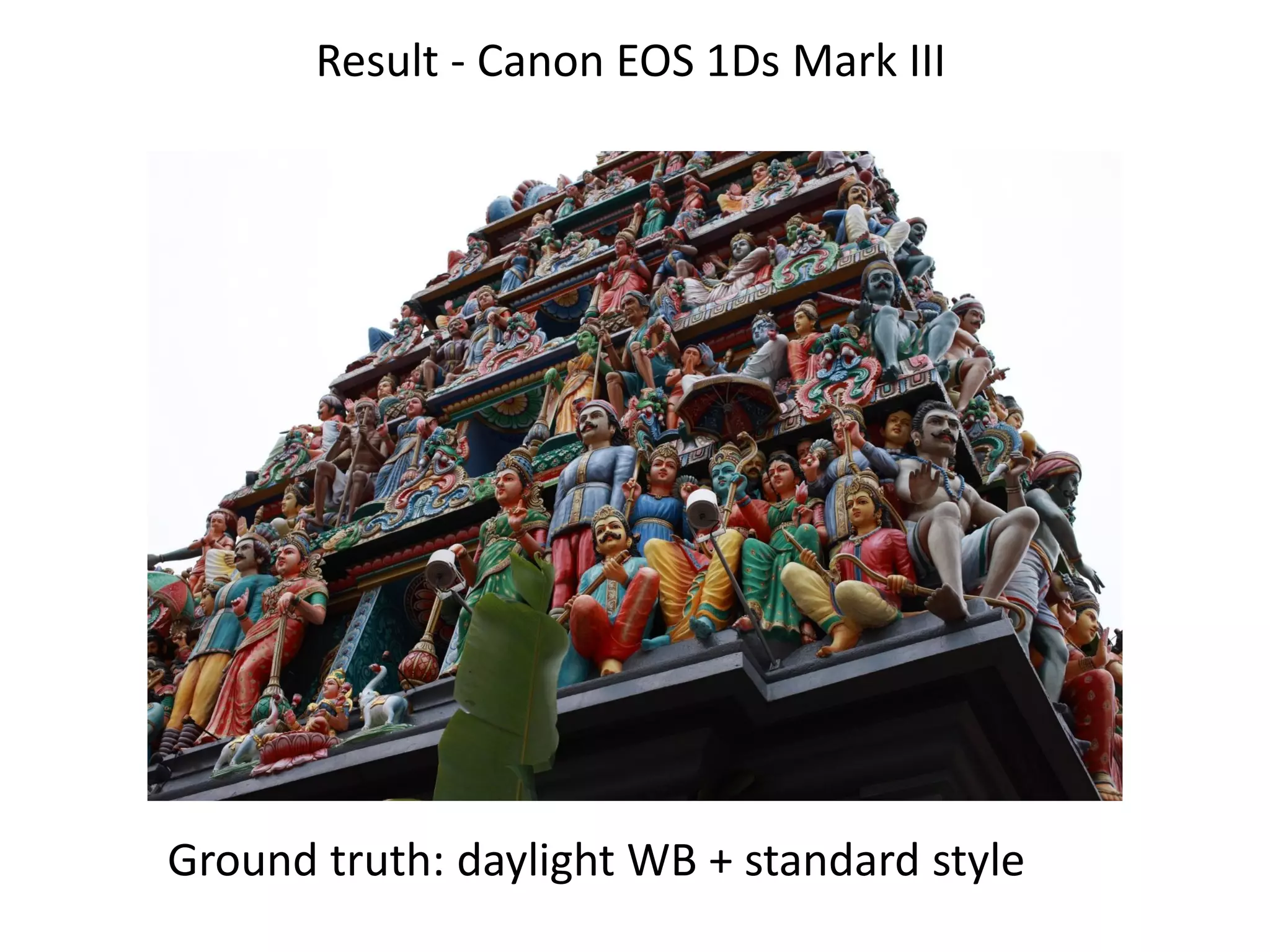
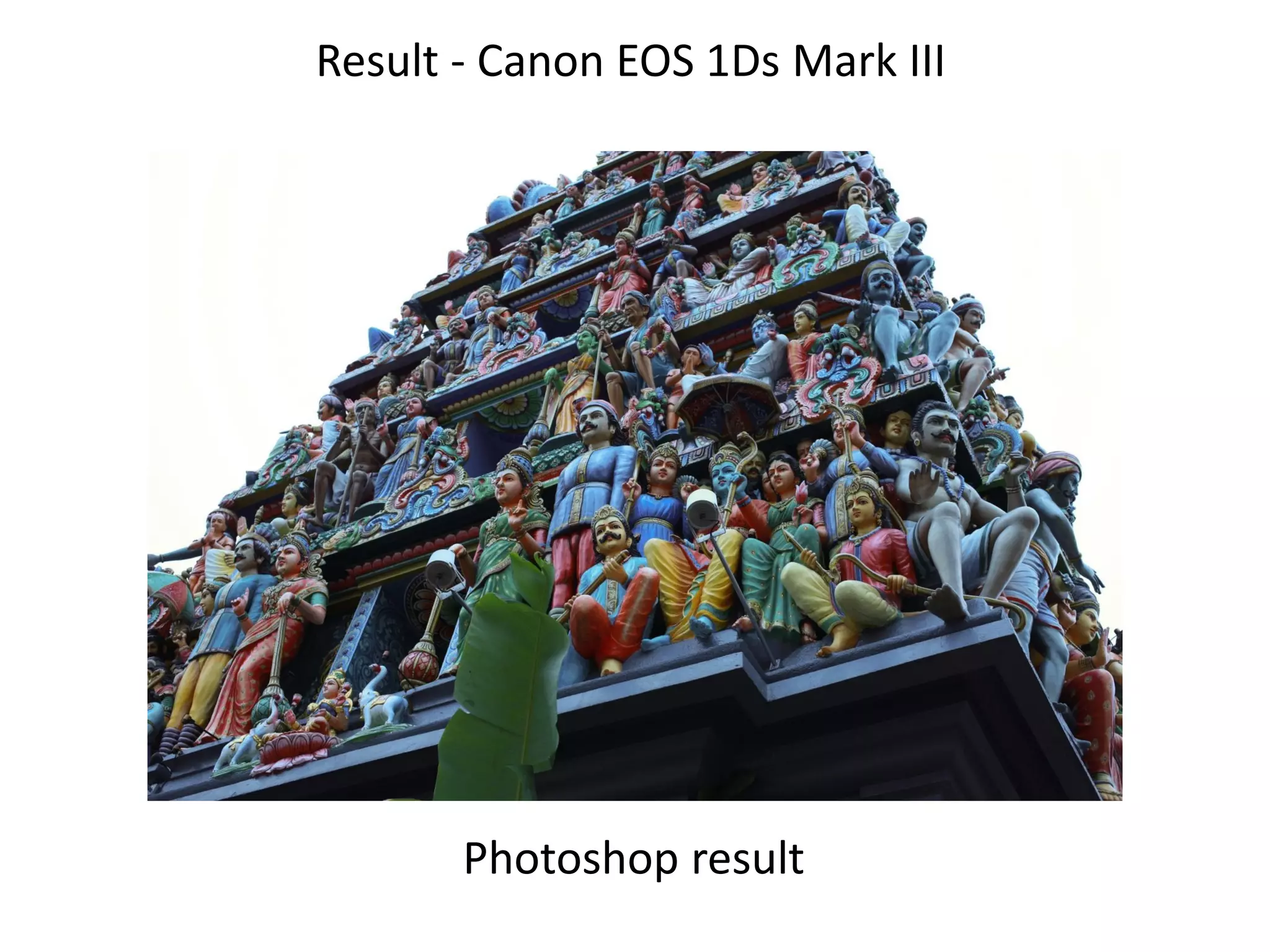
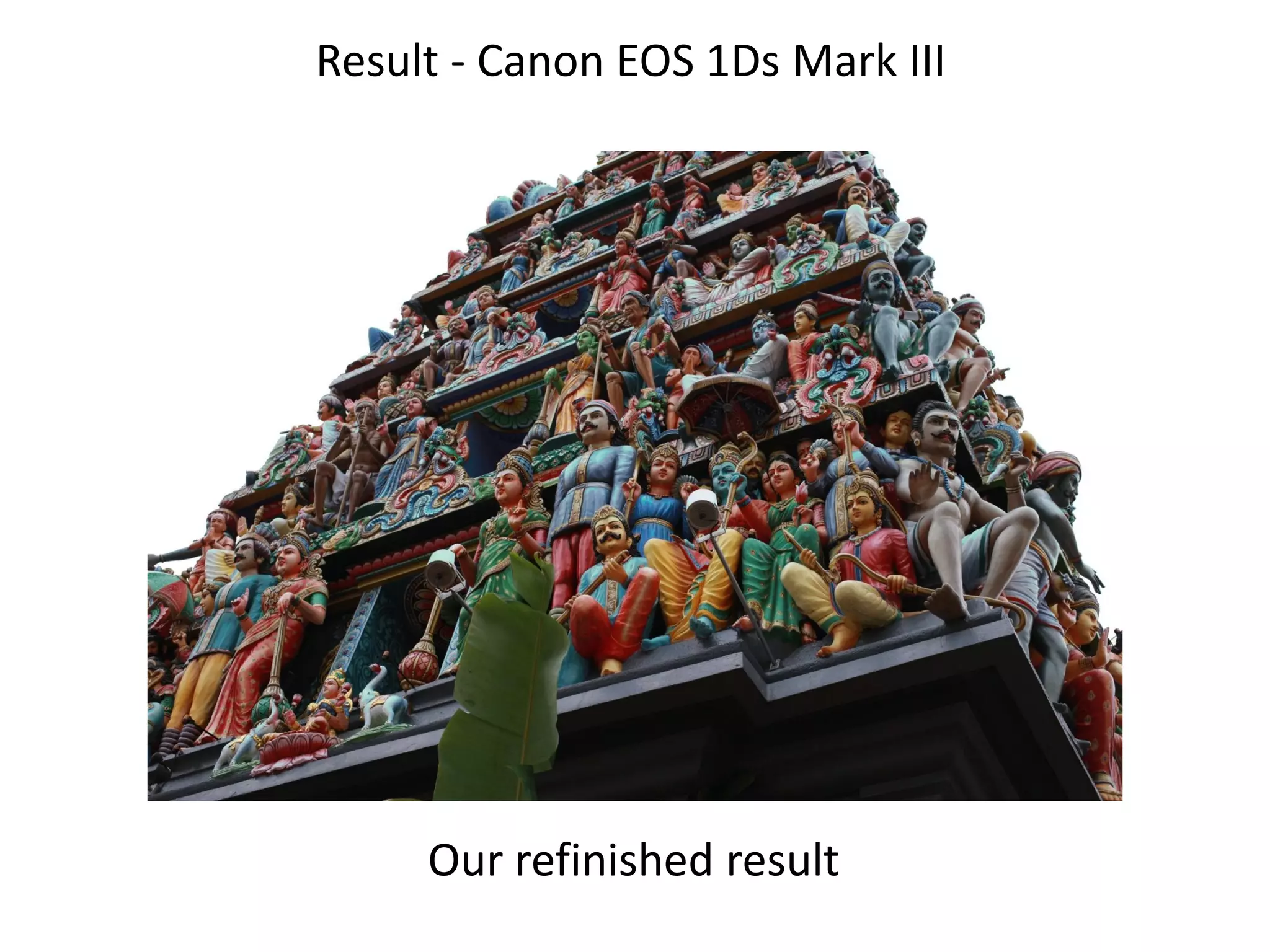
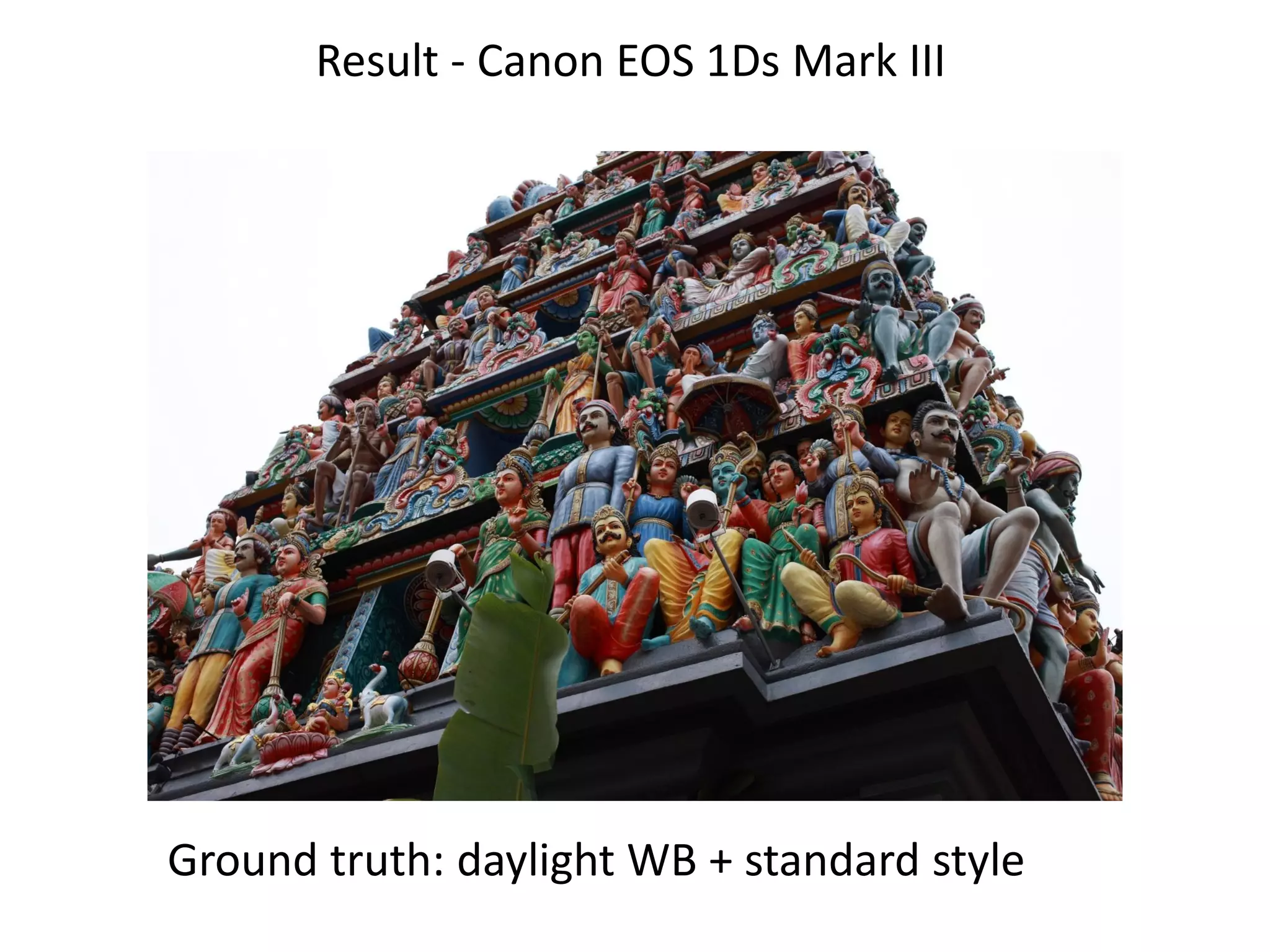
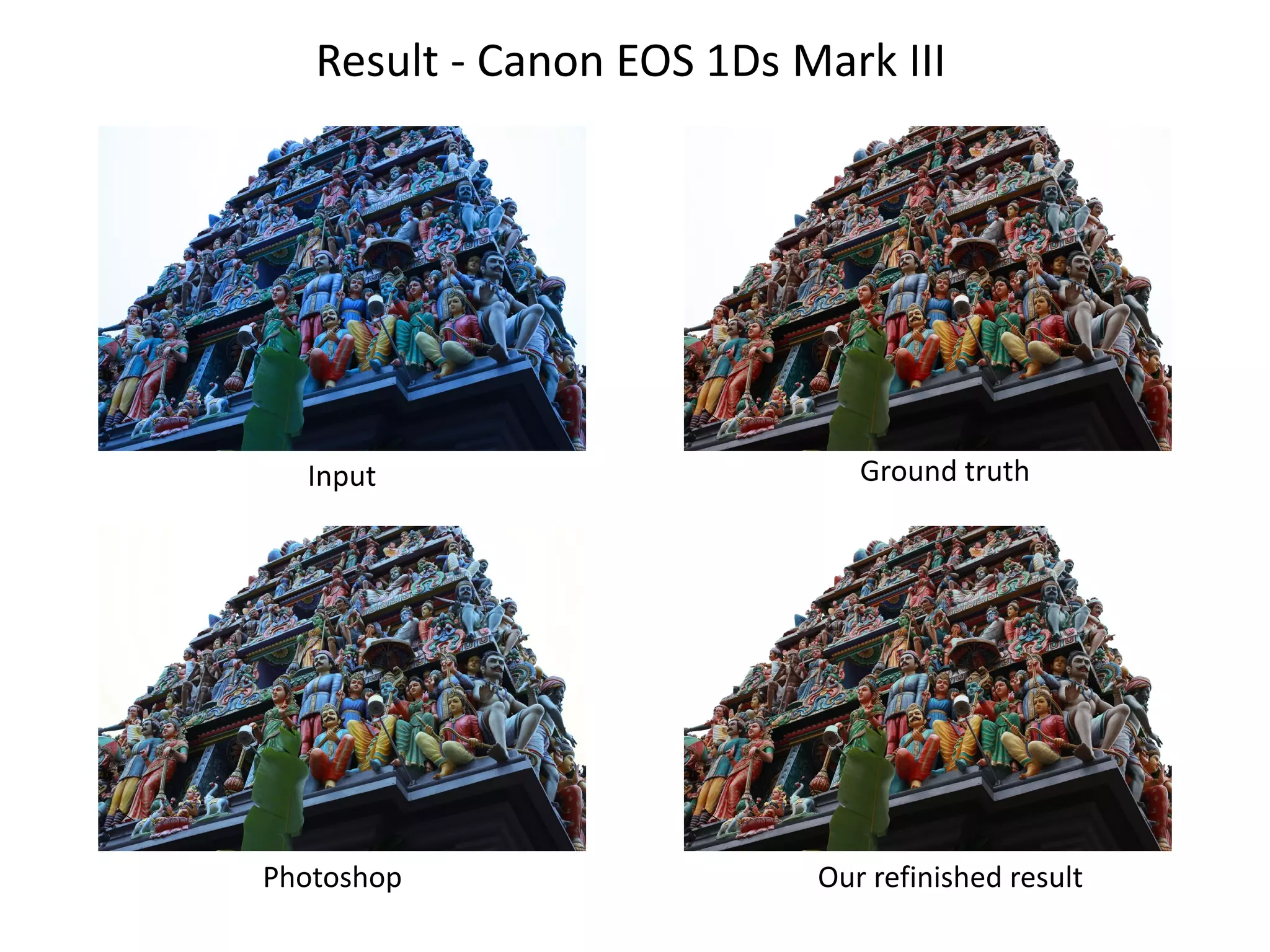
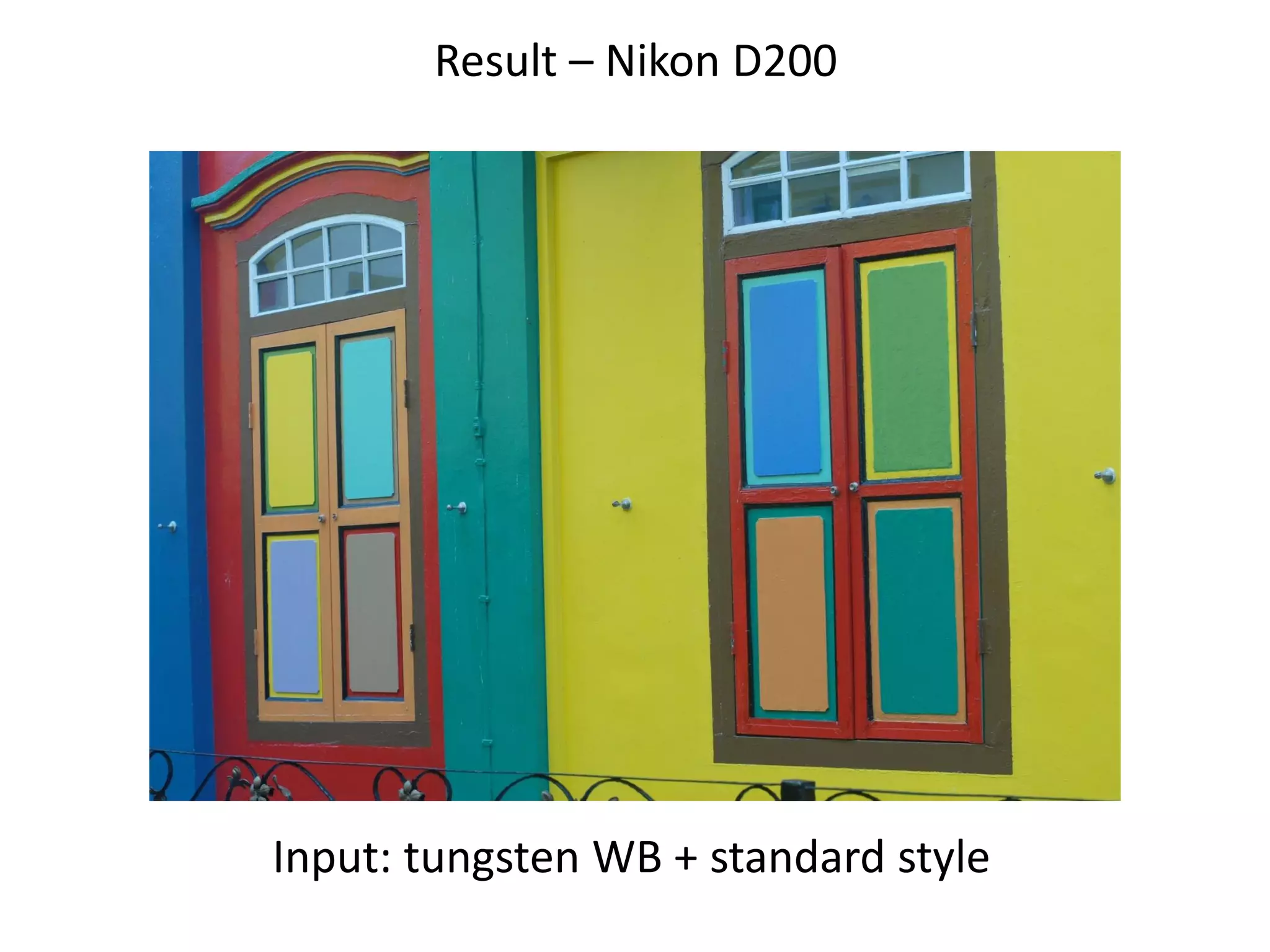
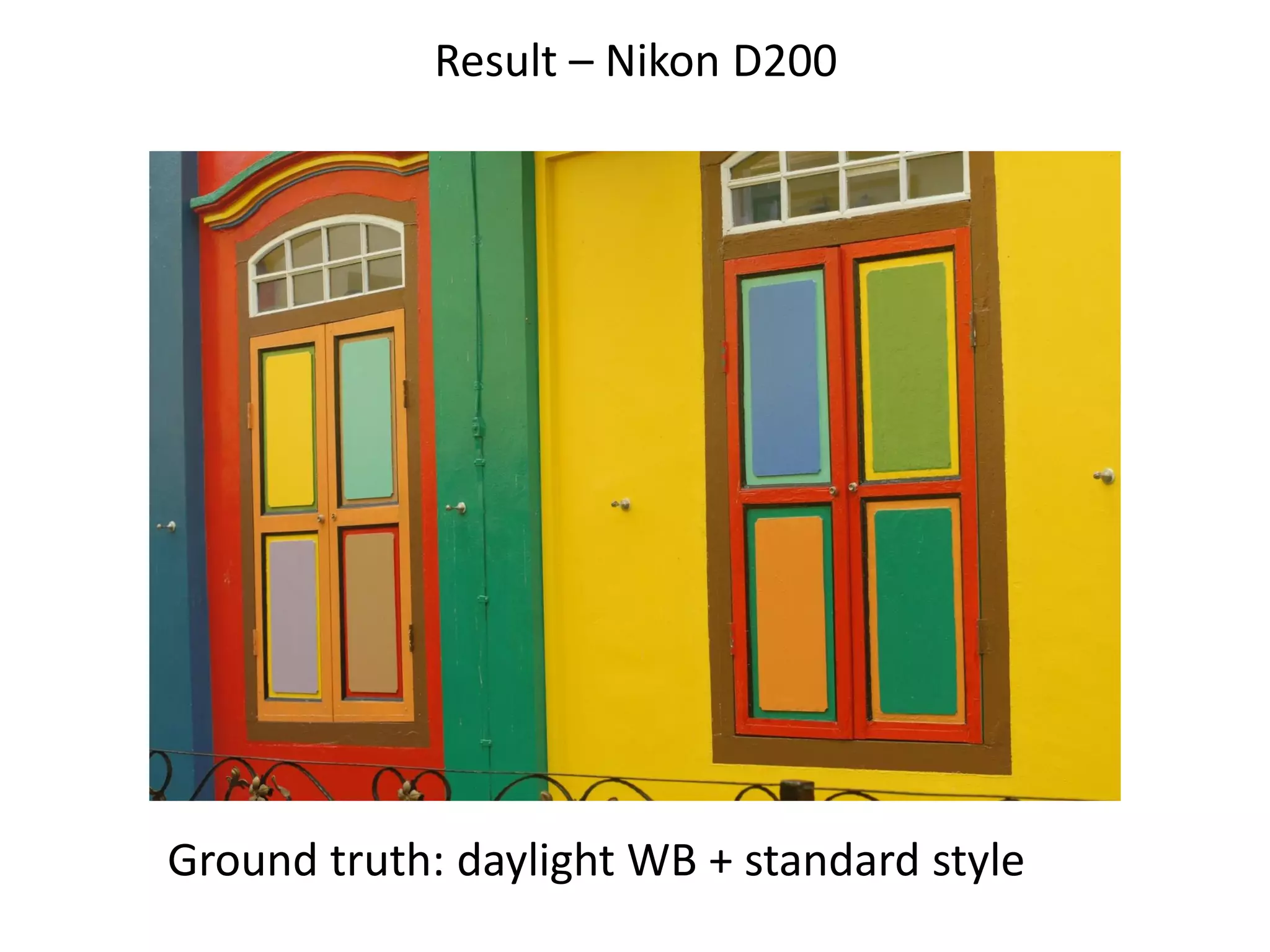
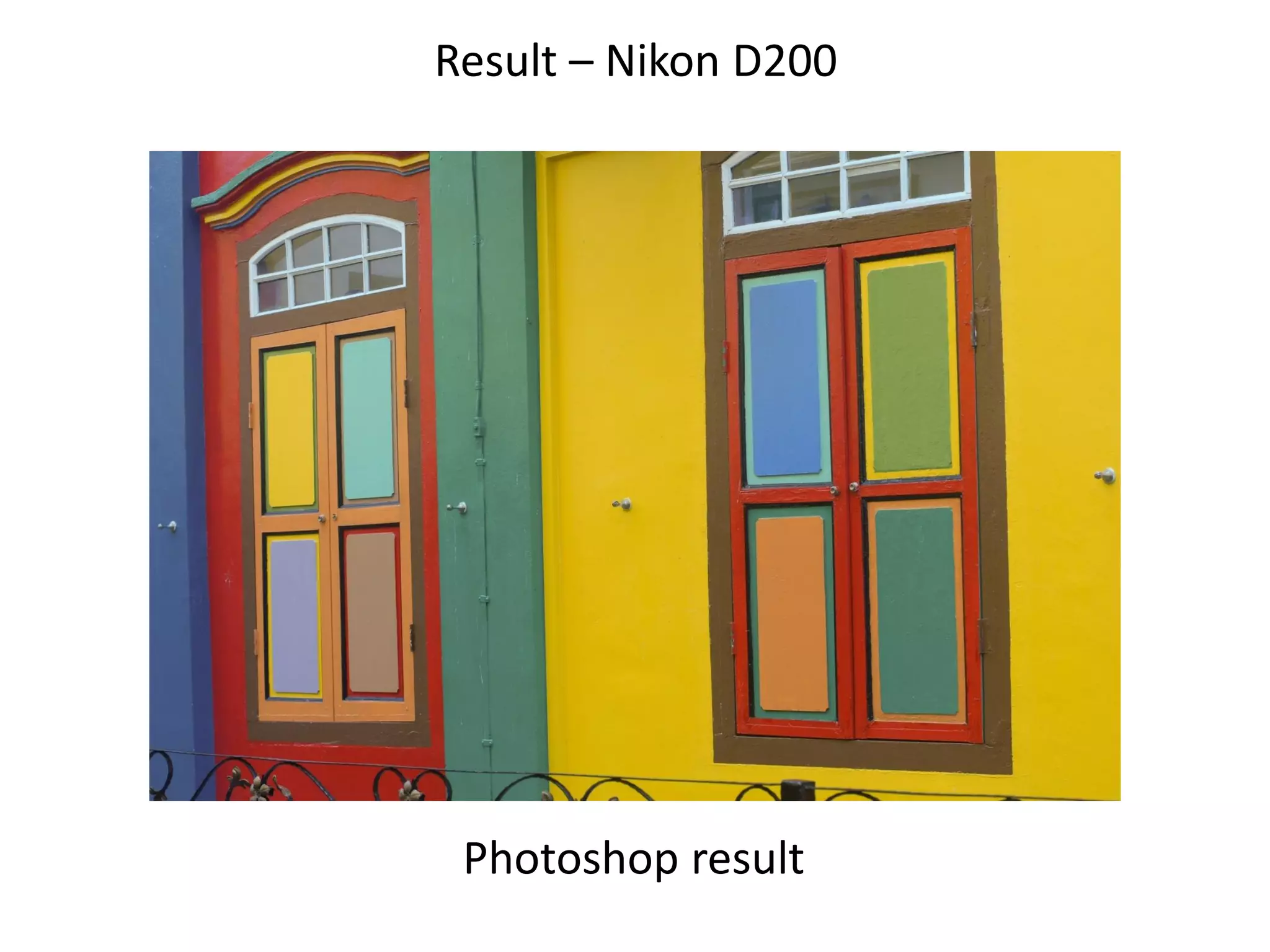
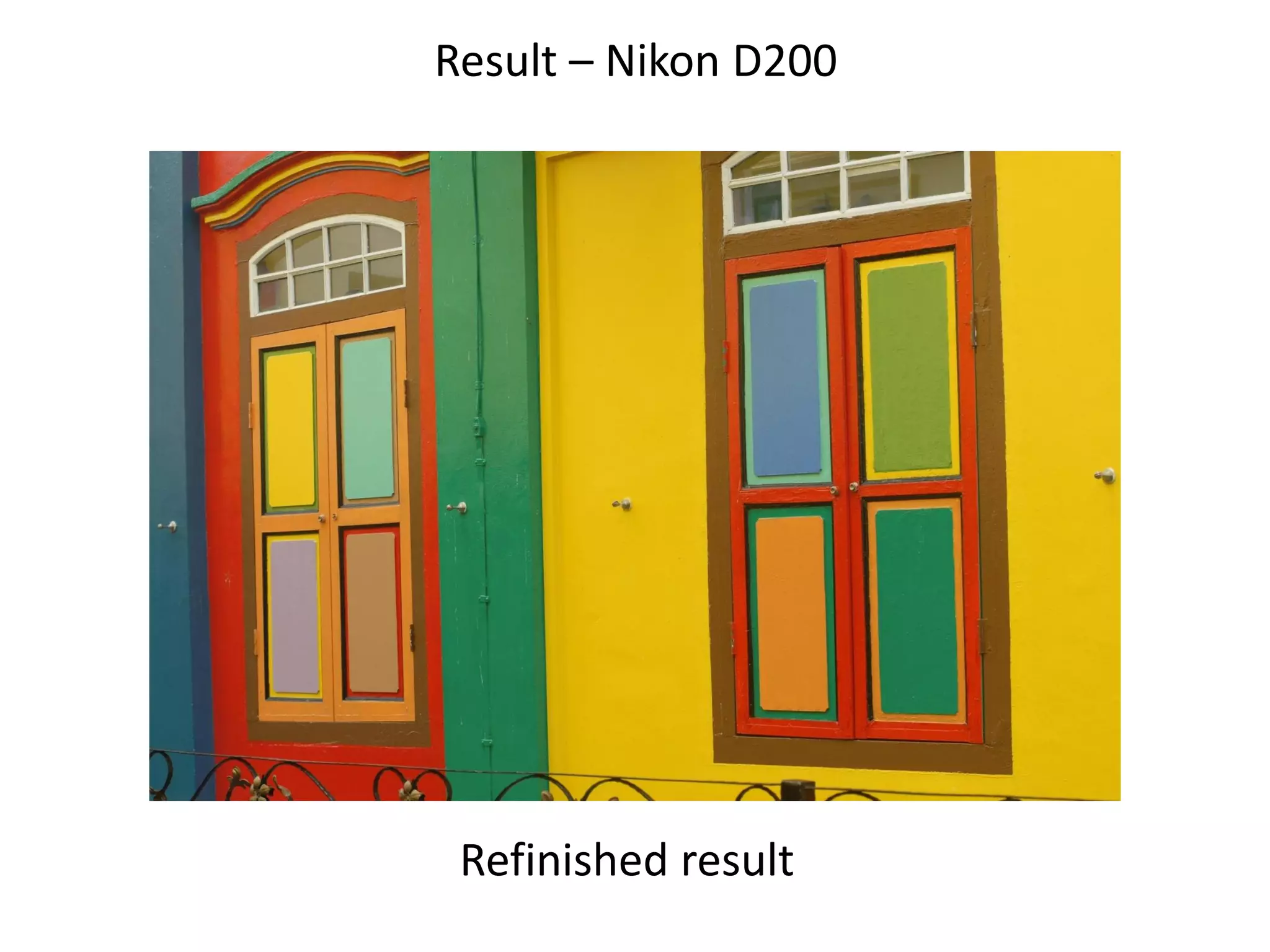
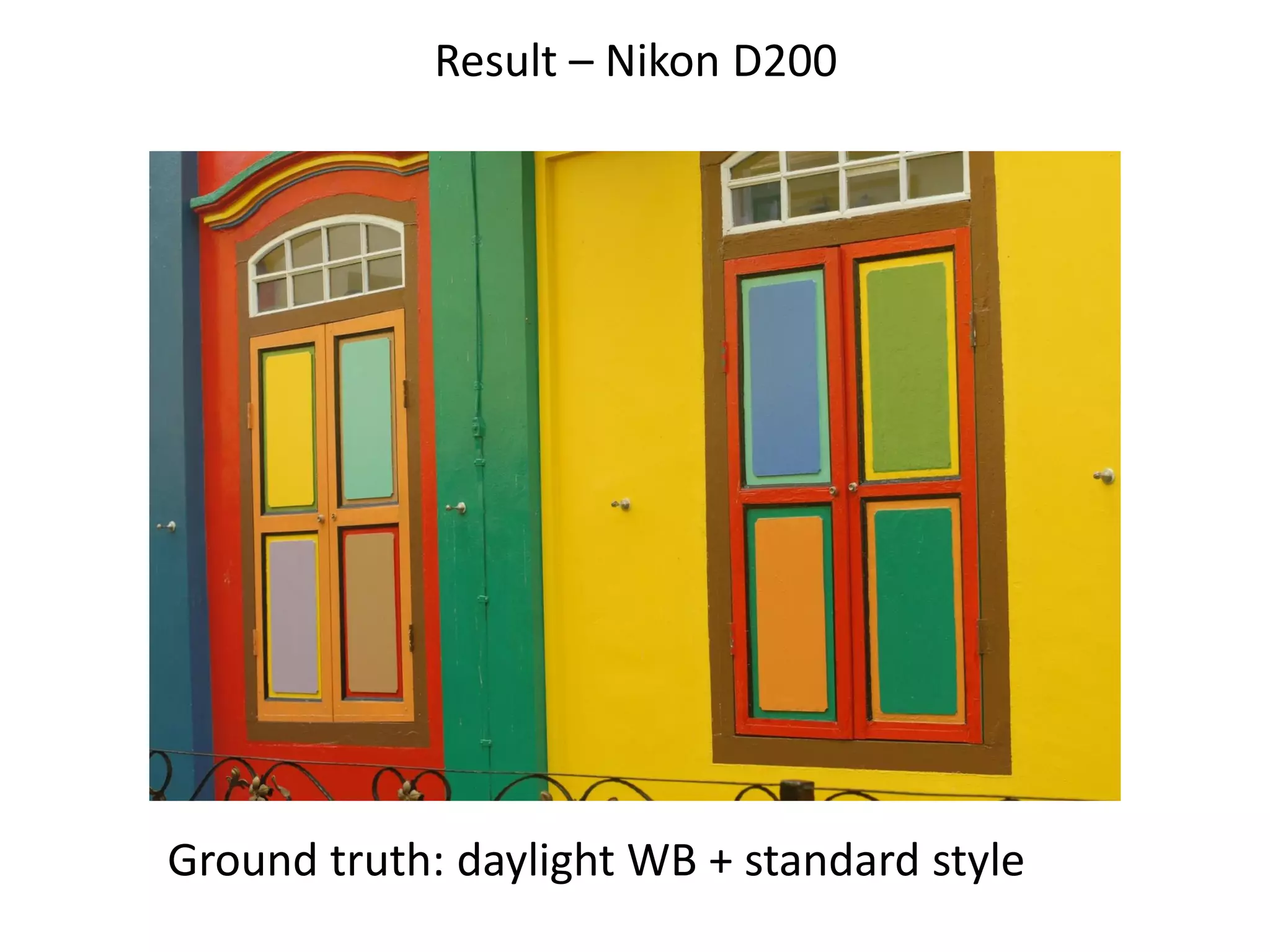
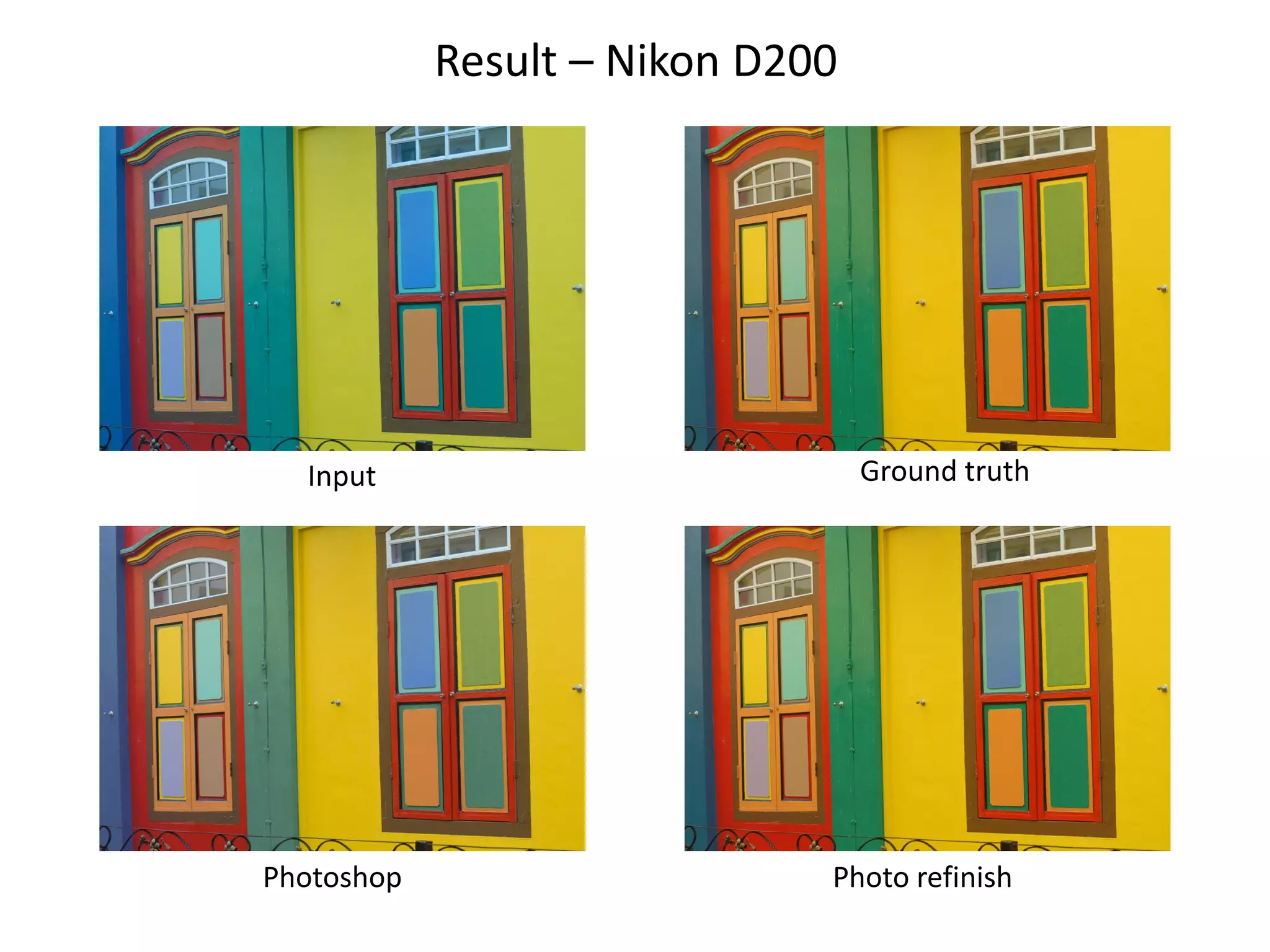





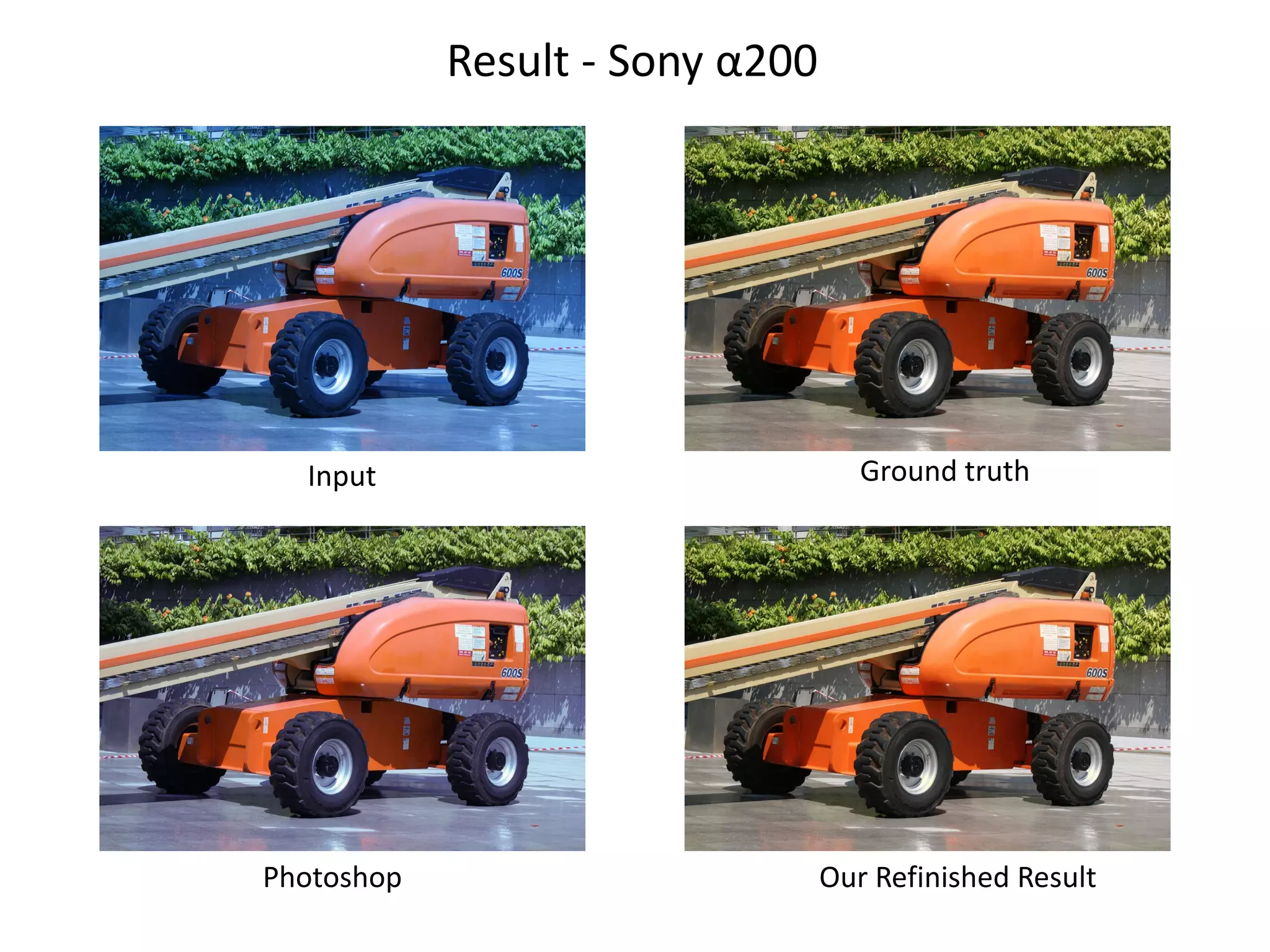


This document presents a new in-camera imaging model for color computer vision, developed by Hai Ting Lin under the supervision of Professor Brown at the National University of Singapore. It details an innovative imaging pipeline that enables the transformation of images from sRGB back to raw formats and discusses applications in photo refinishing, particularly for various camera settings and styles. The research highlights the importance of gamut mapping to improve image calibration and remapping capabilities.








































































