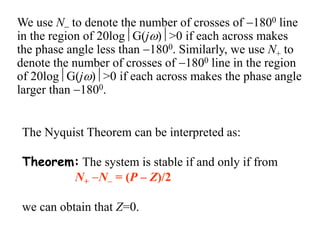
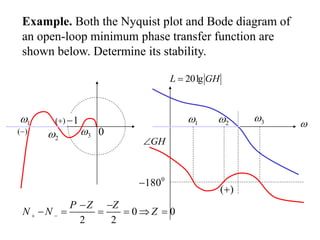
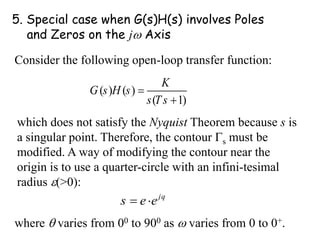
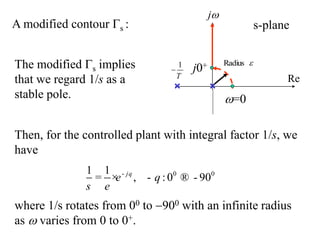
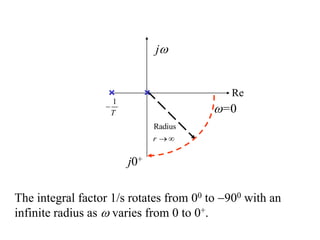
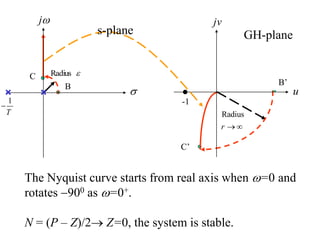
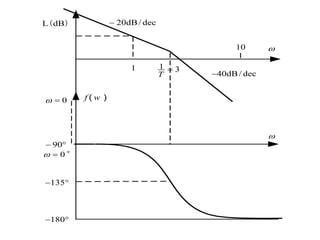
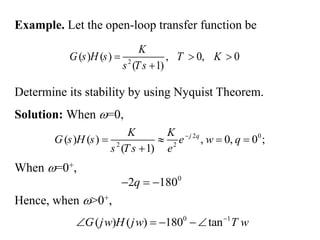
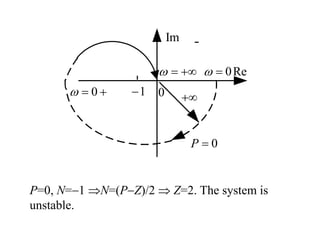
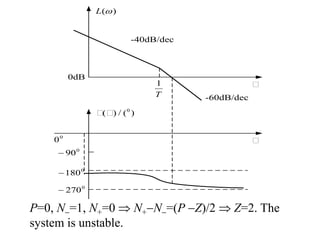
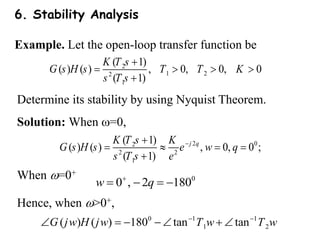
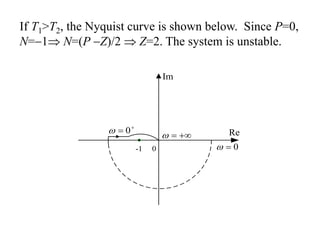
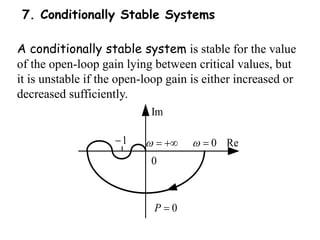
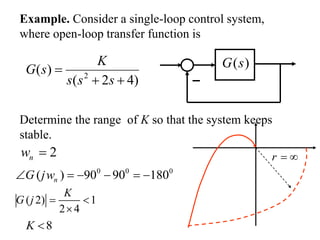
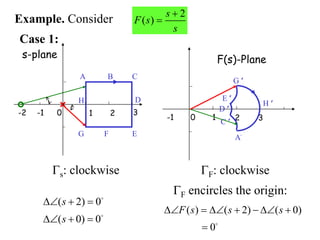
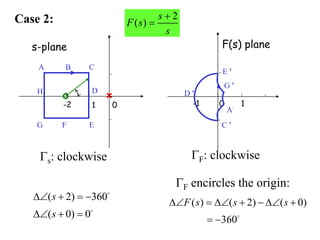
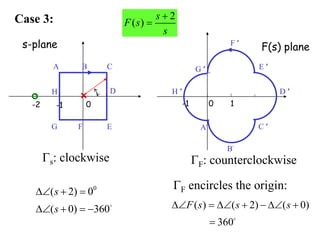
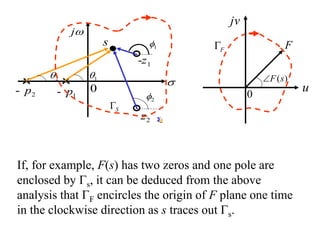
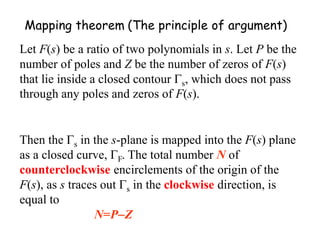
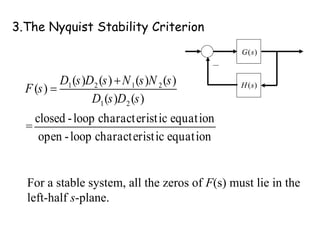
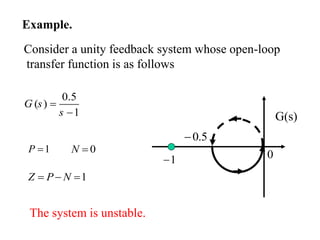
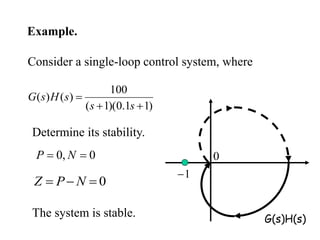
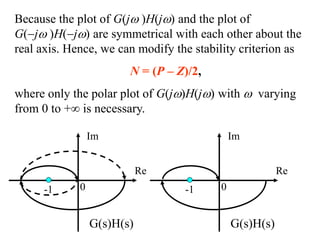
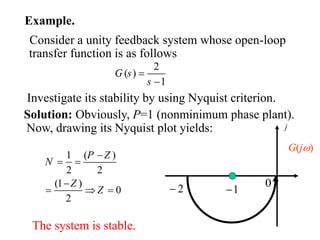
The document discusses the Nyquist stability criterion, which determines the stability of a closed-loop system from its open-loop frequency response and poles. It does not require determining the closed-loop poles. The criterion uses the open-loop transfer function G(s)H(s) and investigates how it maps the Nyquist contour in the s-plane to the F(s)-plane. If the number of encirclements of the origin is equal to the number of open-loop poles, the system is stable. The document provides examples of applying the criterion to various open-loop transfer functions. It also describes interpreting the criterion using the Bode diagram by examining where the phase crosses -180 degrees.
![Conformal mapping: For any given continuous closed
path in the s plane that does not go through any singular
points, there corresponds a closed curve in the F(s) plane.
s-plane F(s) plane
j
s
[ ]
0
s
1
s
2
s
3
s
F s
[ ( )]
Im
Re
0
F
1
F s
( )
2
F s
( )
3
F s
( )](https://image.slidesharecdn.com/7-2-230627163927-578af77c/85/7-2-Nyquist-Stability-Criterion-ppt-6-320.jpg)
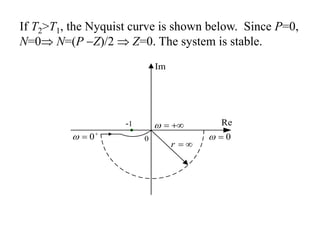
![Nyquist contour
r
0
S
s
jw
s-plane
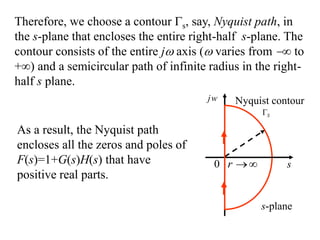
It is clear that when s traverses the semicircle of infinite
radius, F(s) remains a constant. That is, the encirclements
of the origin of F(s) only determines by F(j ) as varies
from to + provided that no zeros or poles lie on the
j axis.
lim ( )
lim [1 ( ) ( )] const.
s
s
F s
G s H s
By assumption,](https://image.slidesharecdn.com/7-2-230627163927-578af77c/85/7-2-Nyquist-Stability-Criterion-ppt-16-320.jpg)
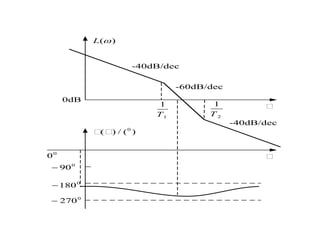
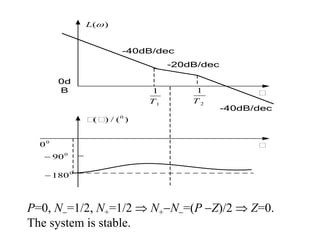
![The Bode diagram is:
1
1
T
2
1
T 3
1
T
dB
[ 20]
[ 40]
[ 60]
20logK
w
w
0
180
0
270
c
w
0
0
G
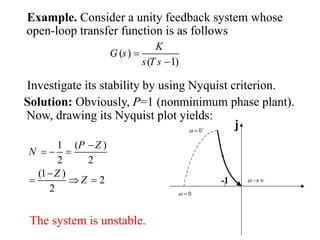
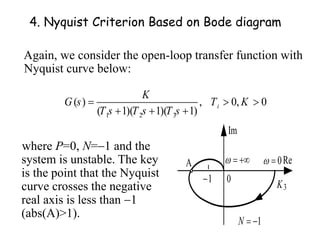
The system is unstable because the phase angle plot
crosses the1800 line in the region of 20logG(j)>0.
N=1](https://image.slidesharecdn.com/7-2-230627163927-578af77c/85/7-2-Nyquist-Stability-Criterion-ppt-27-320.jpg)