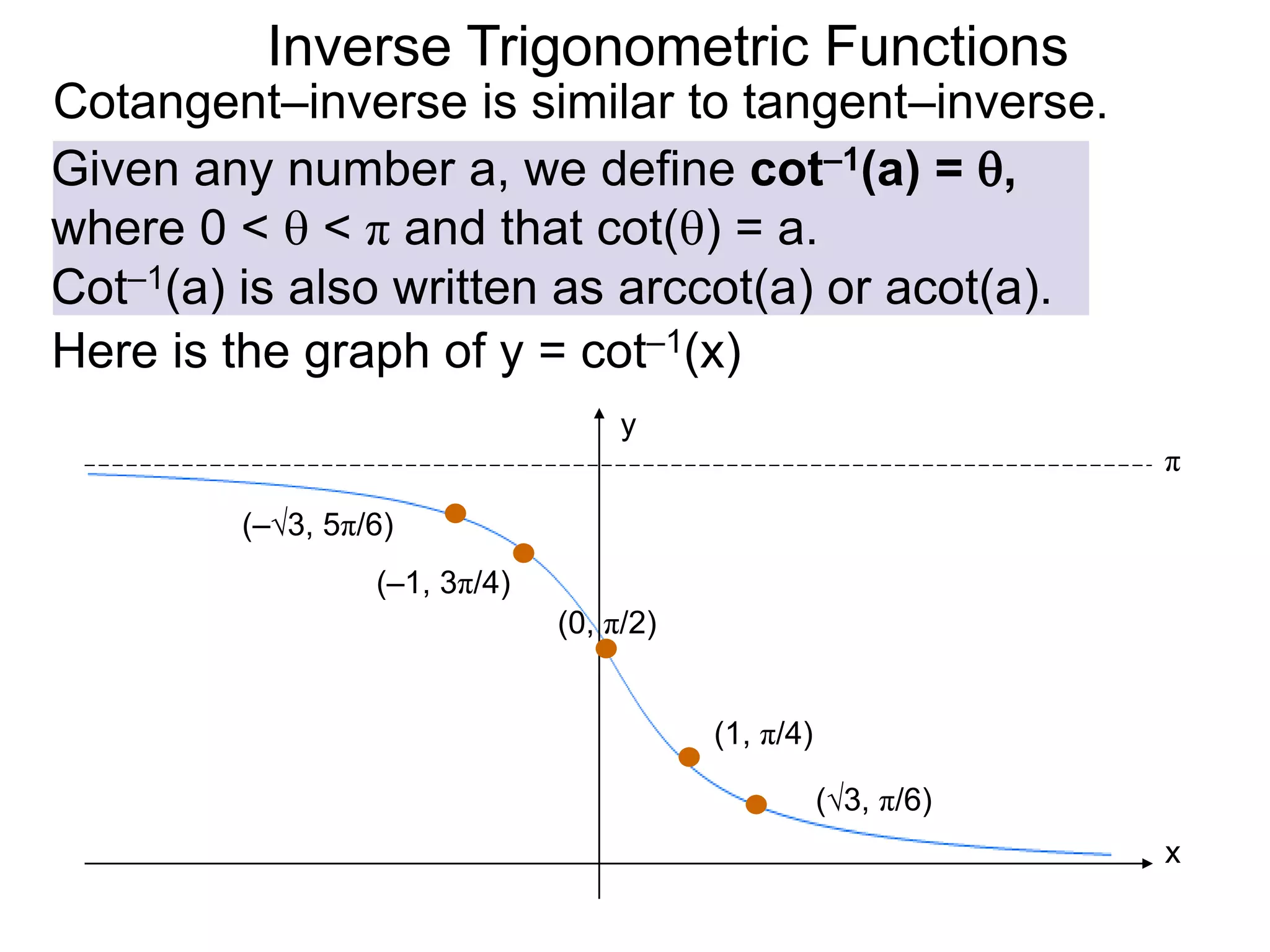
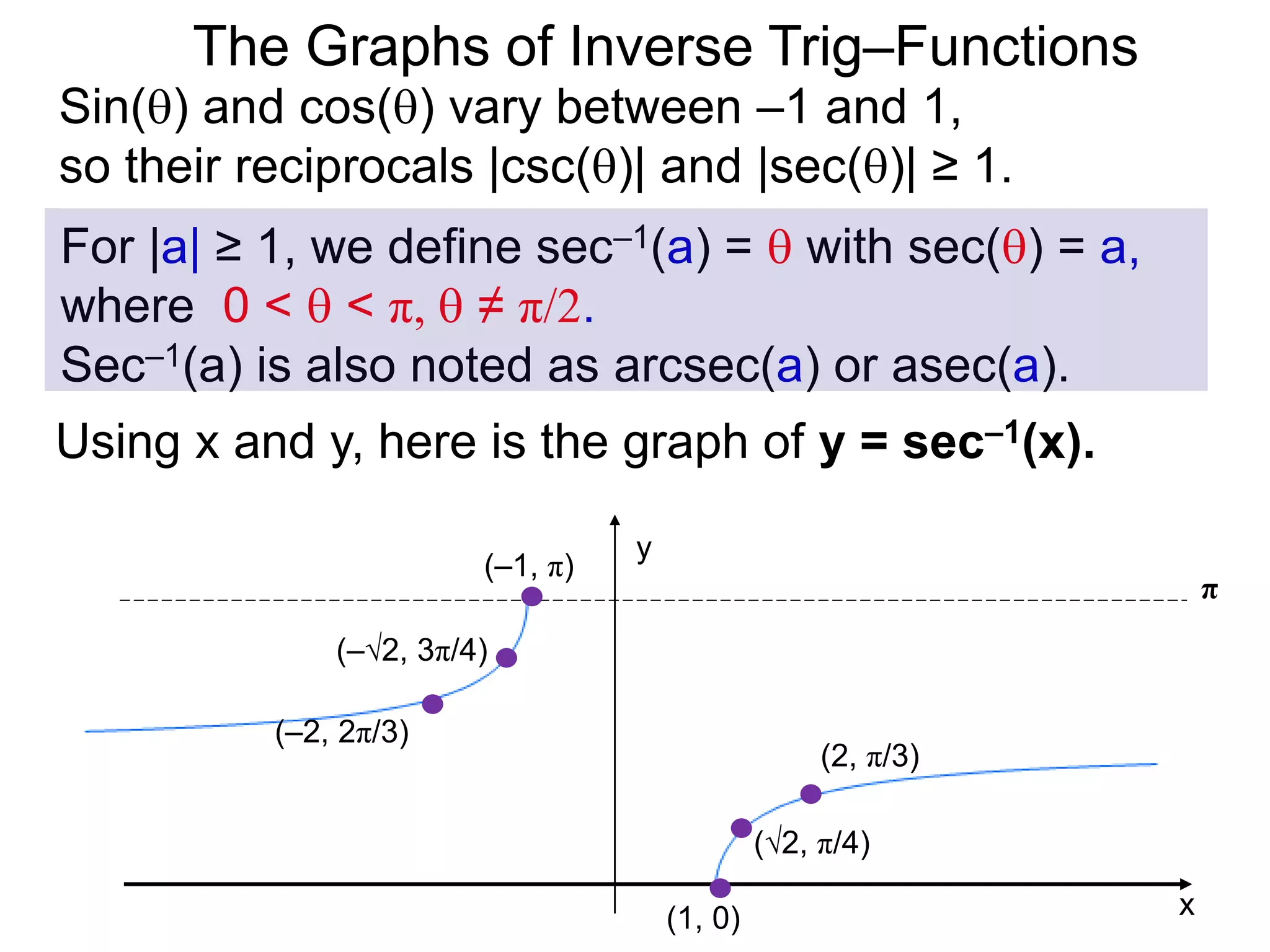
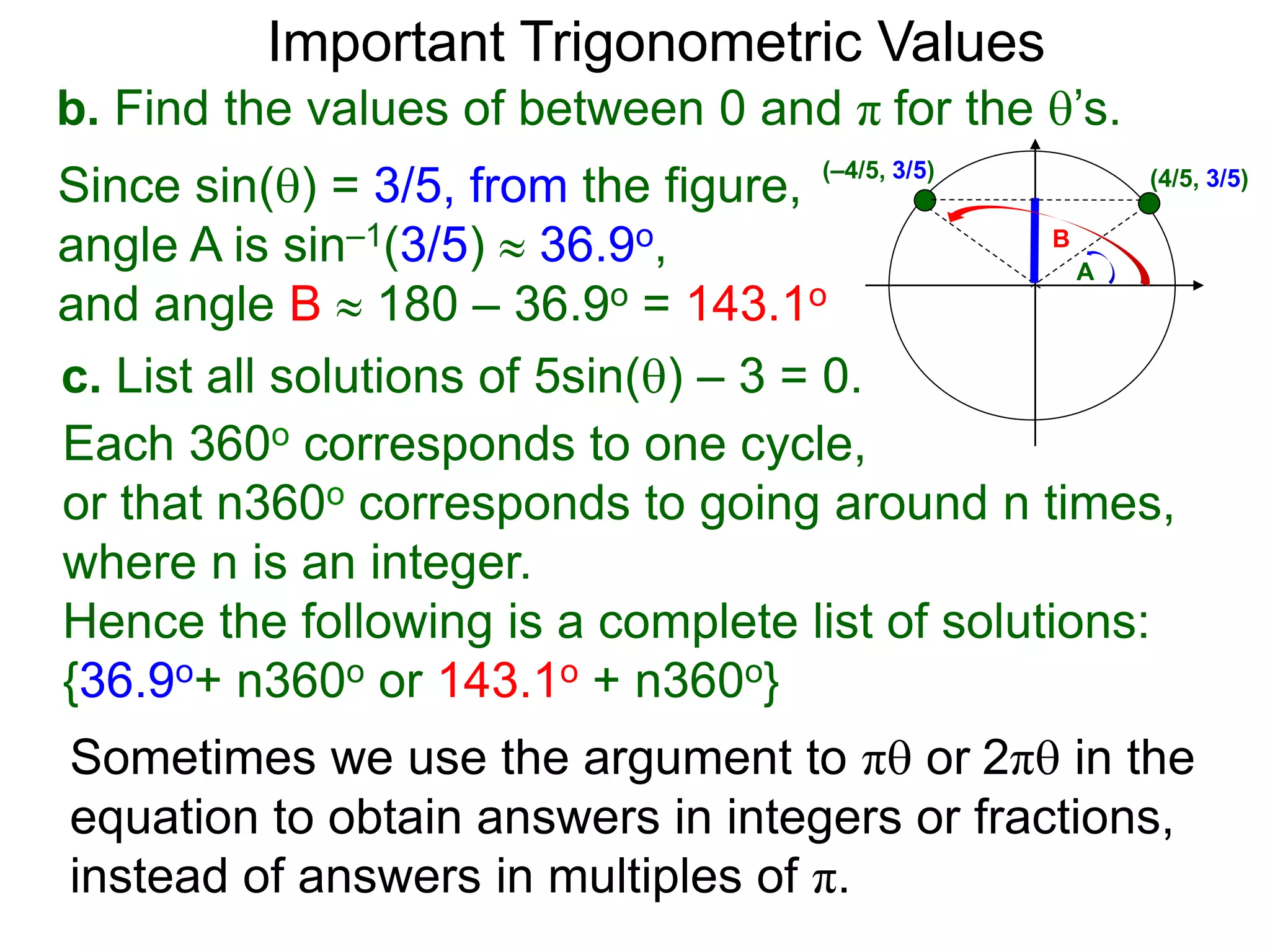
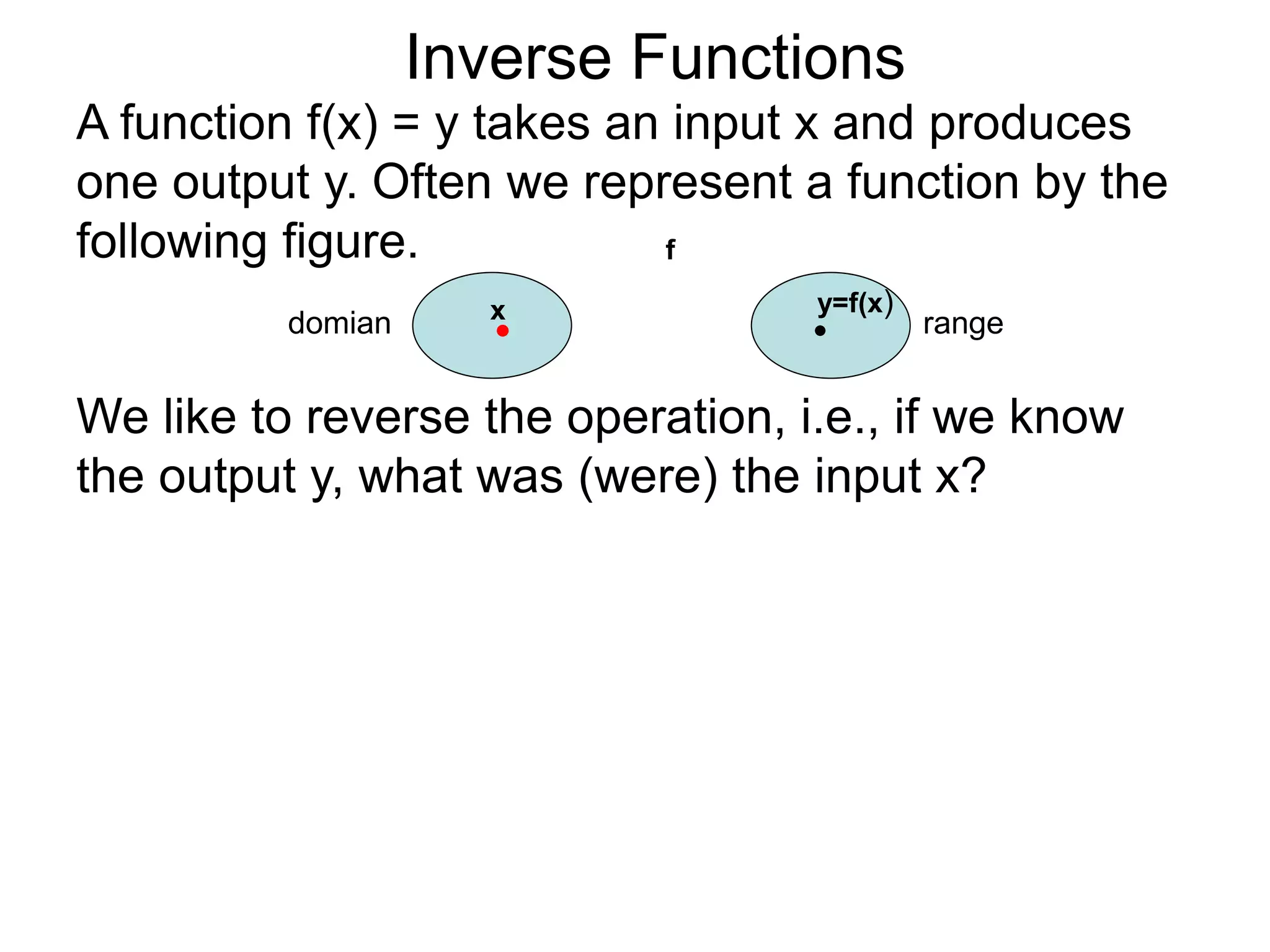
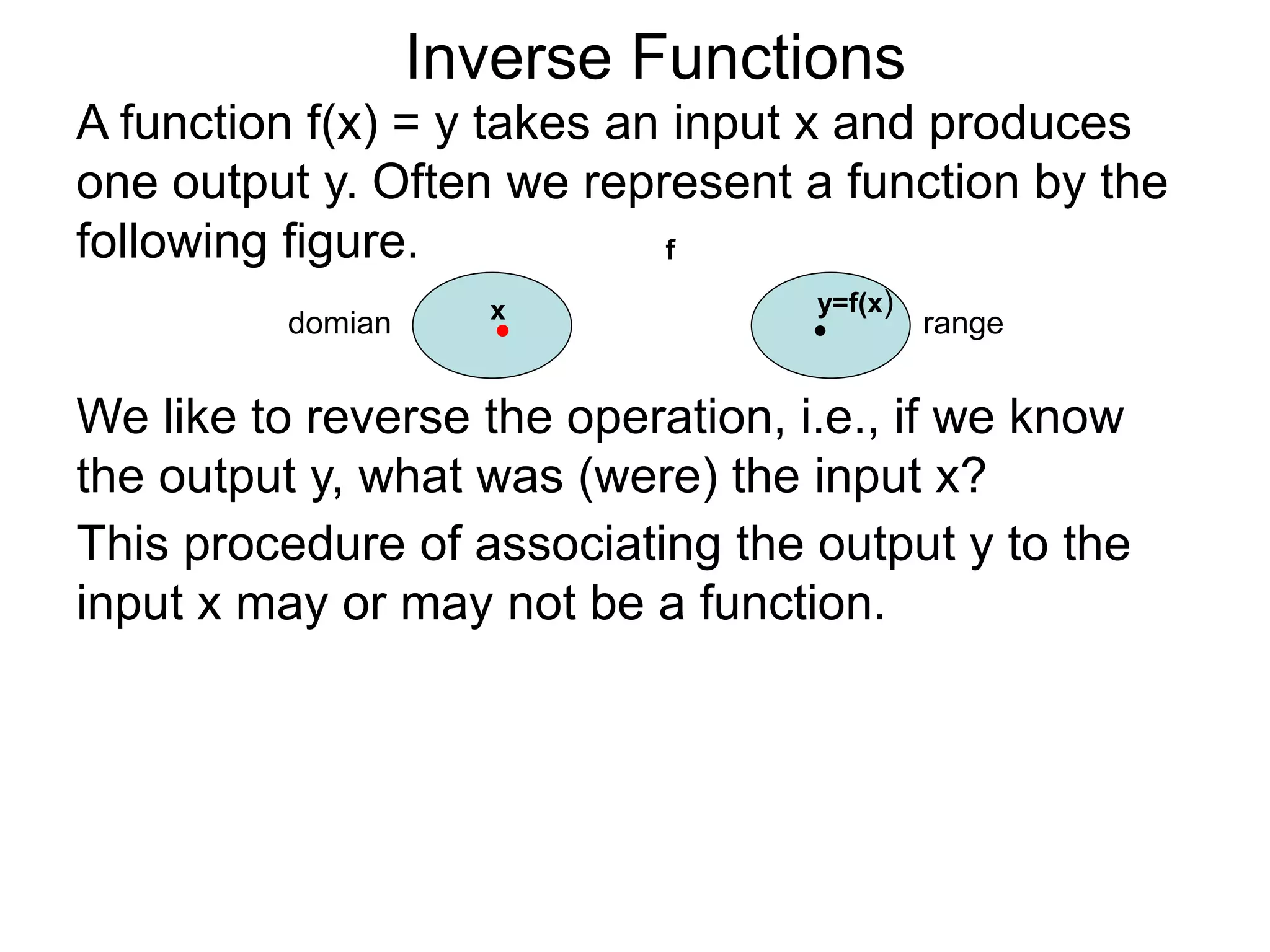
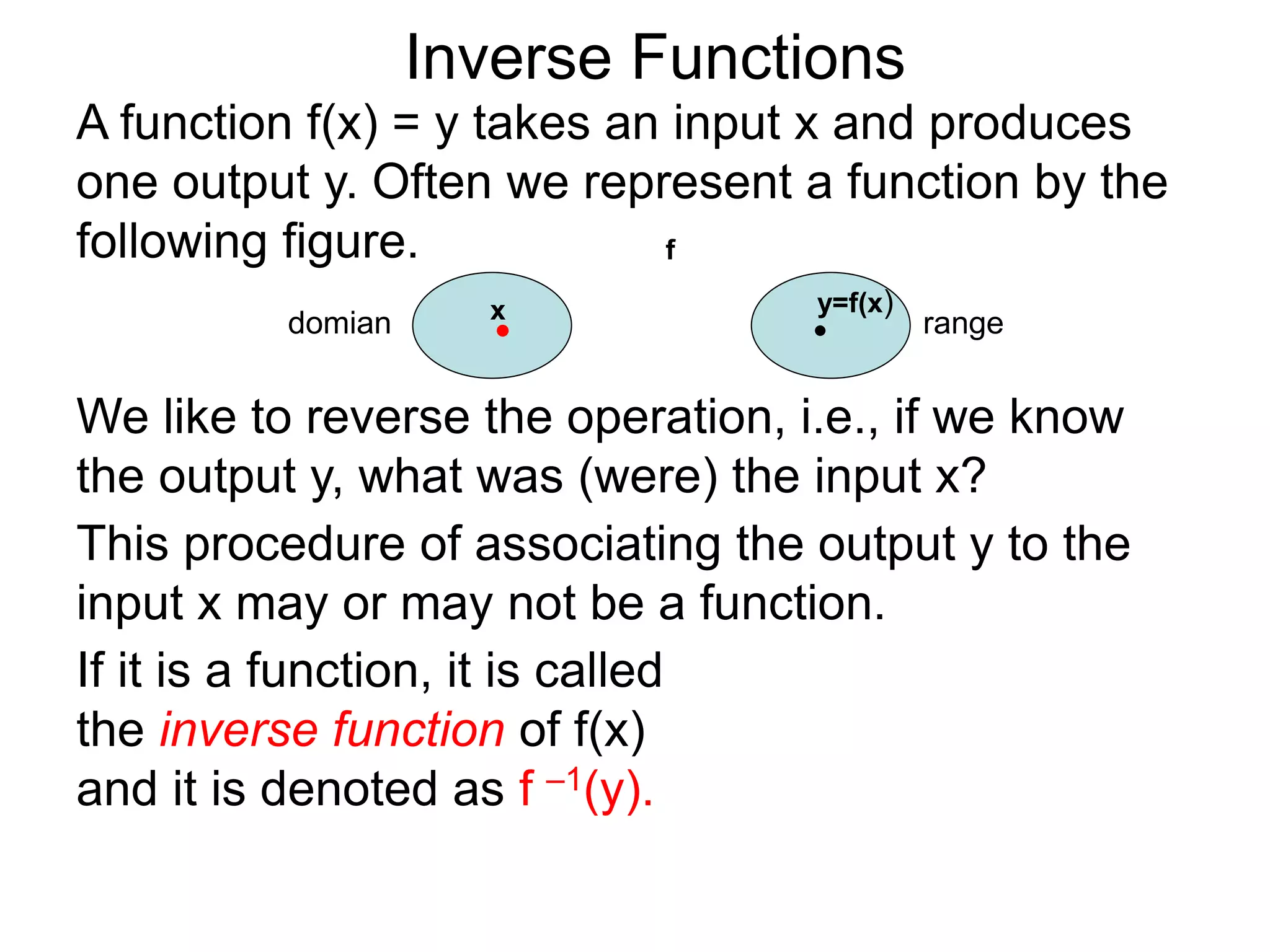
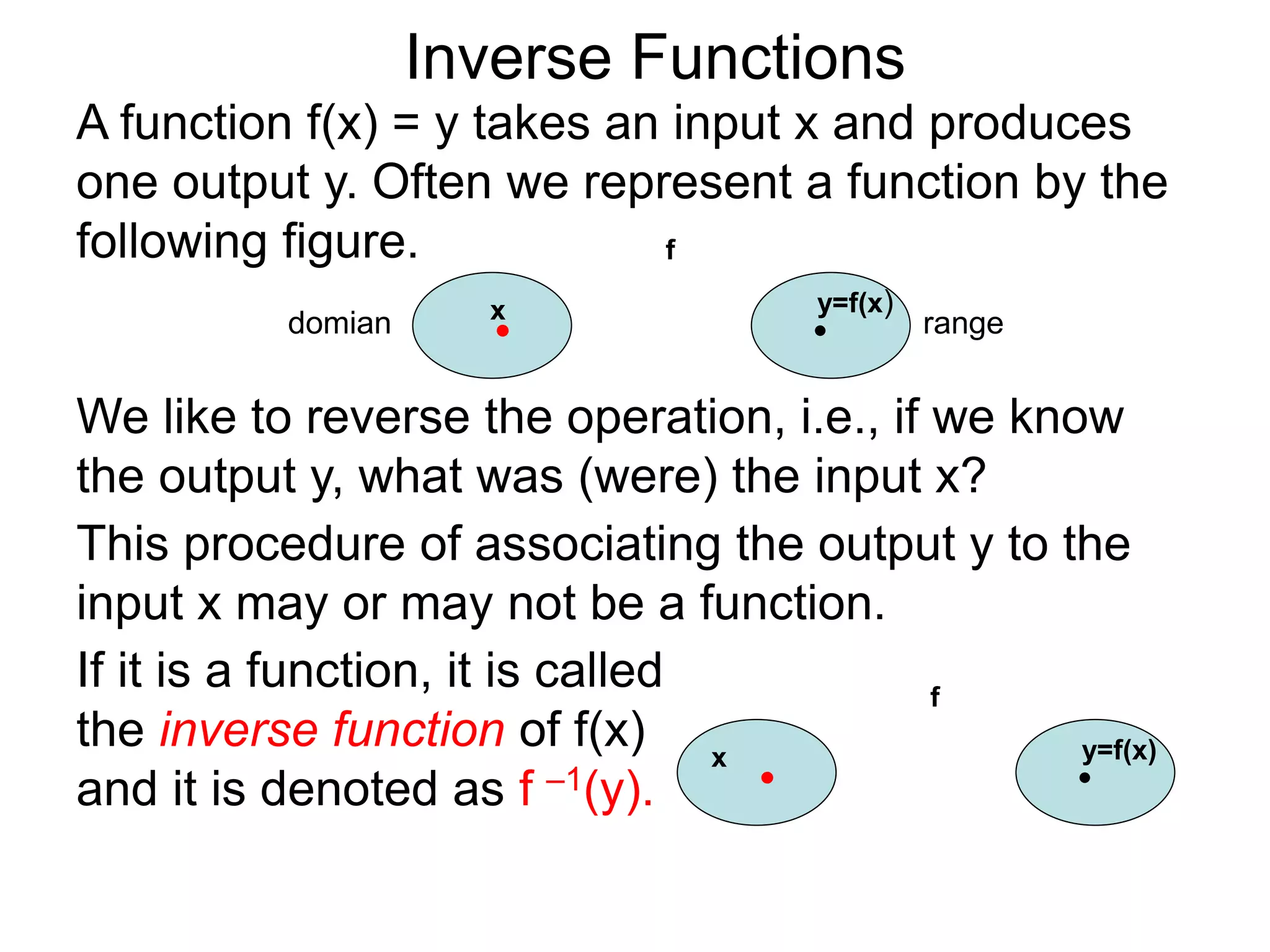
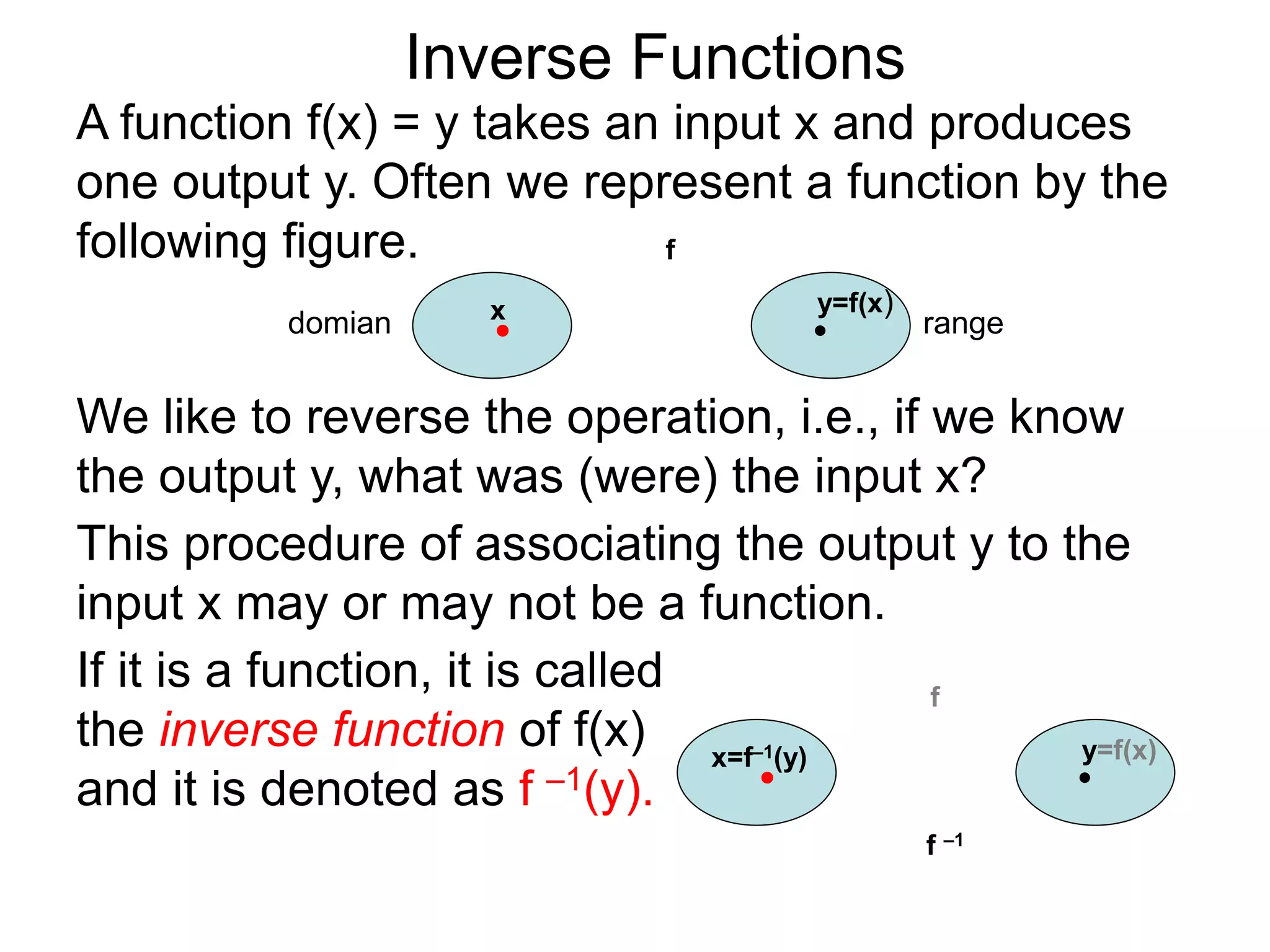
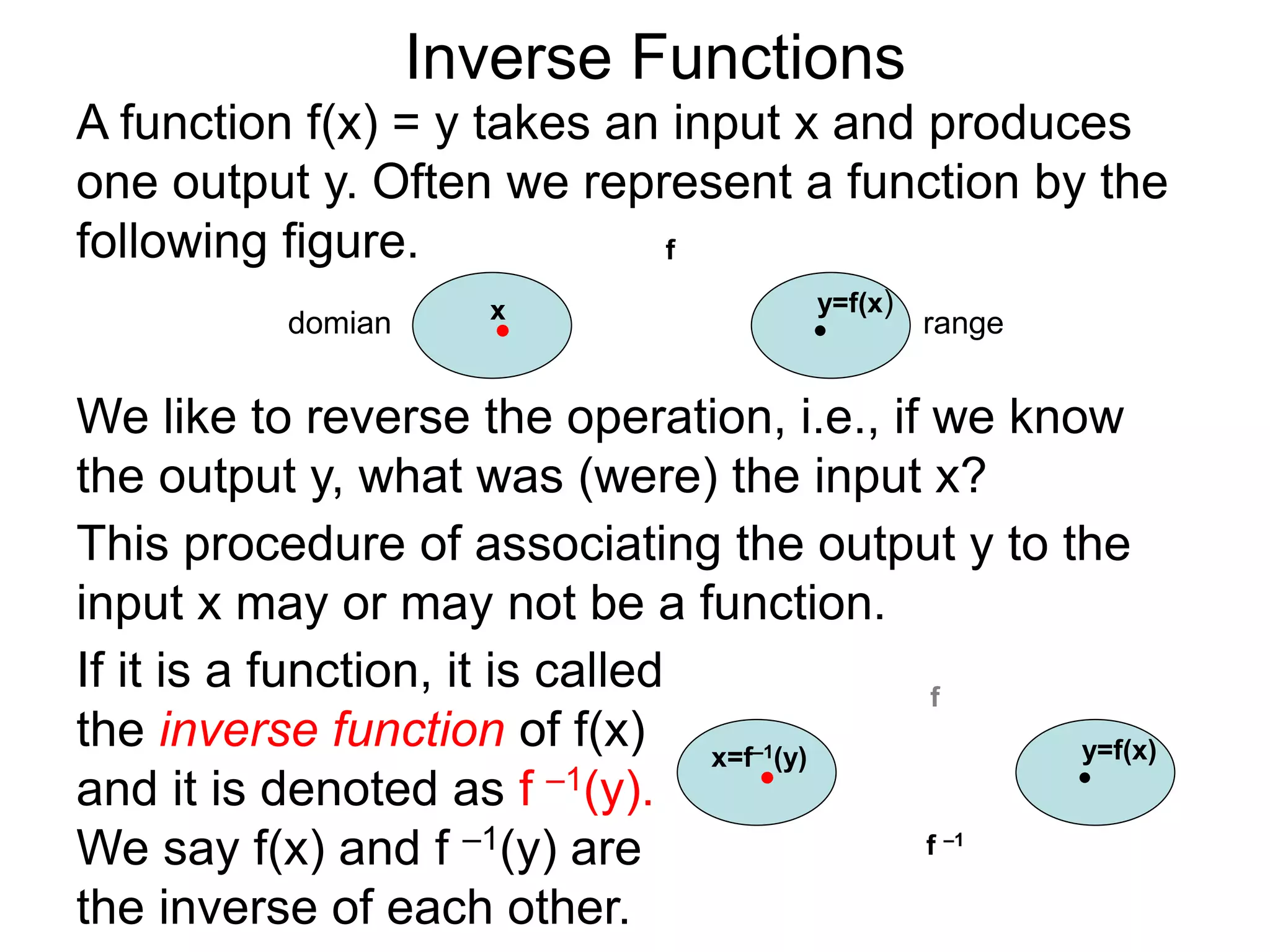
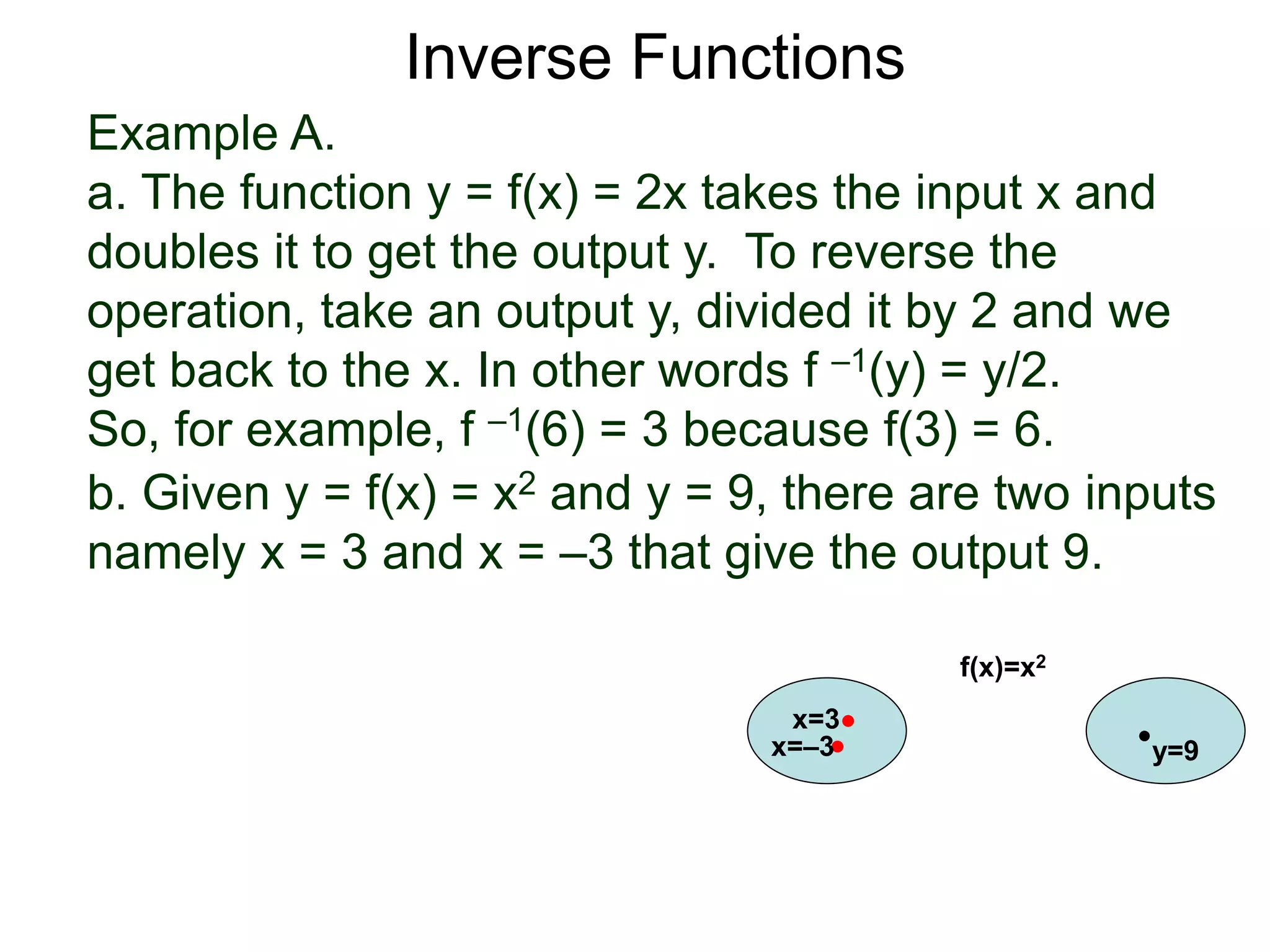
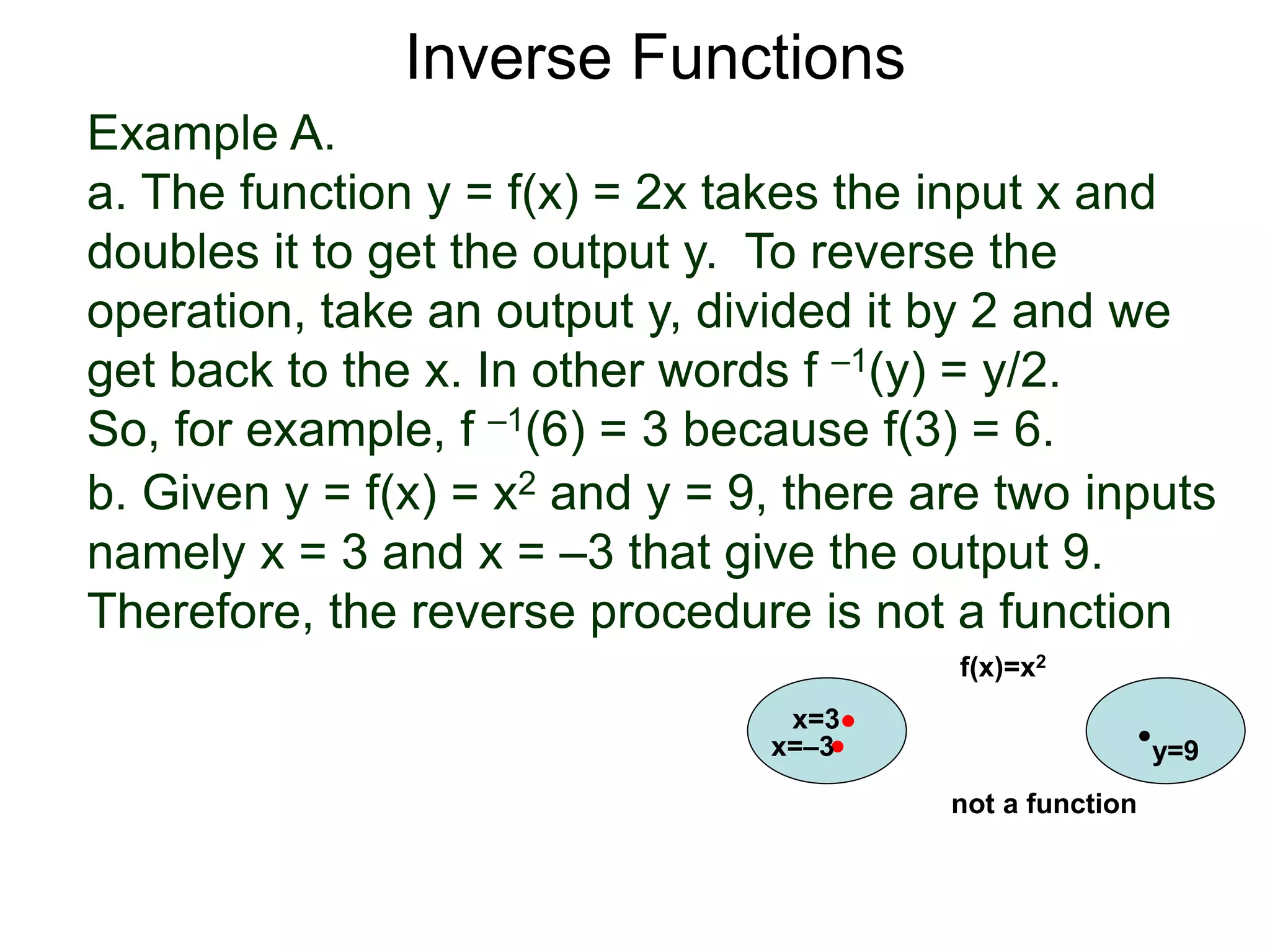
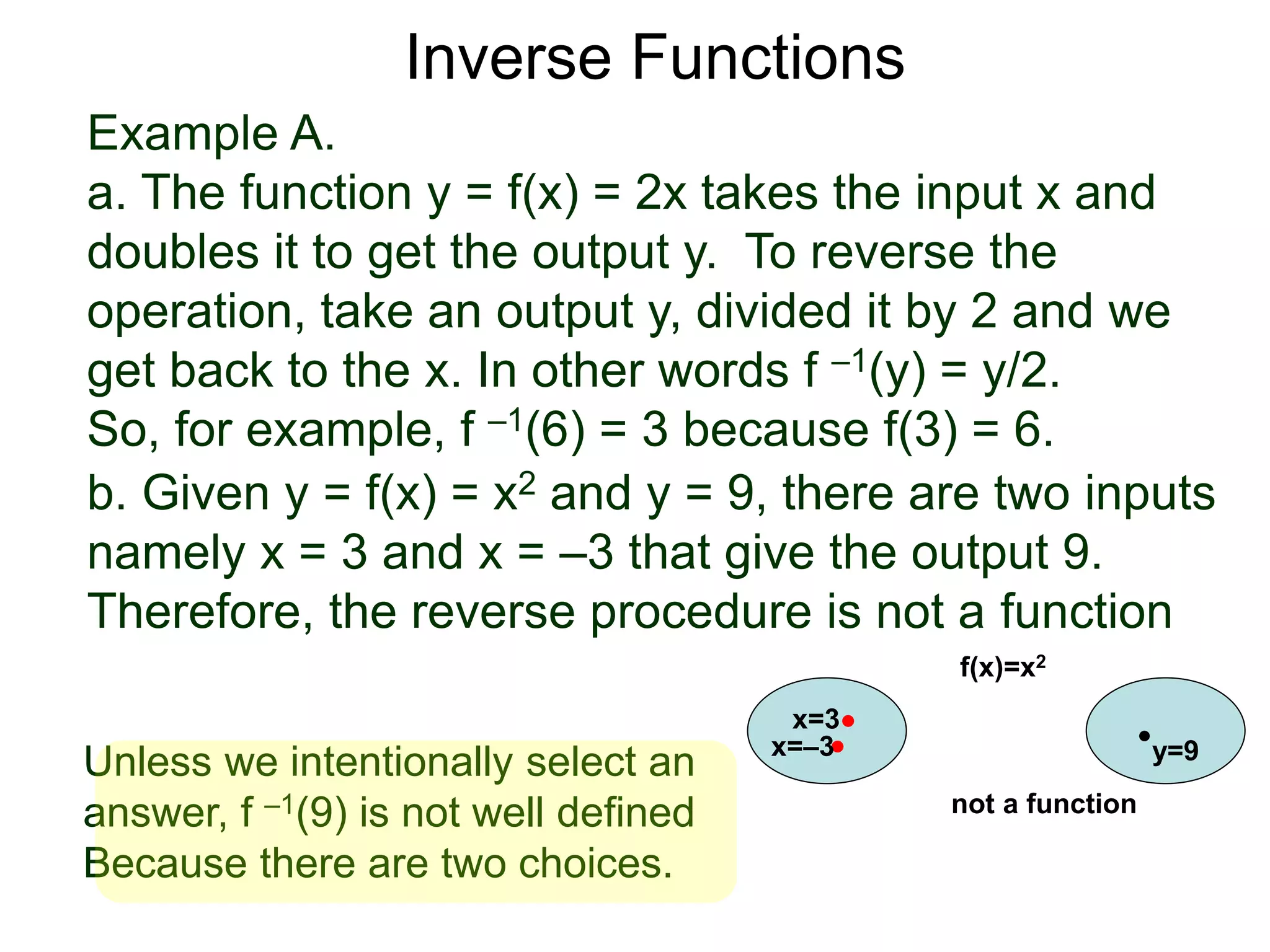
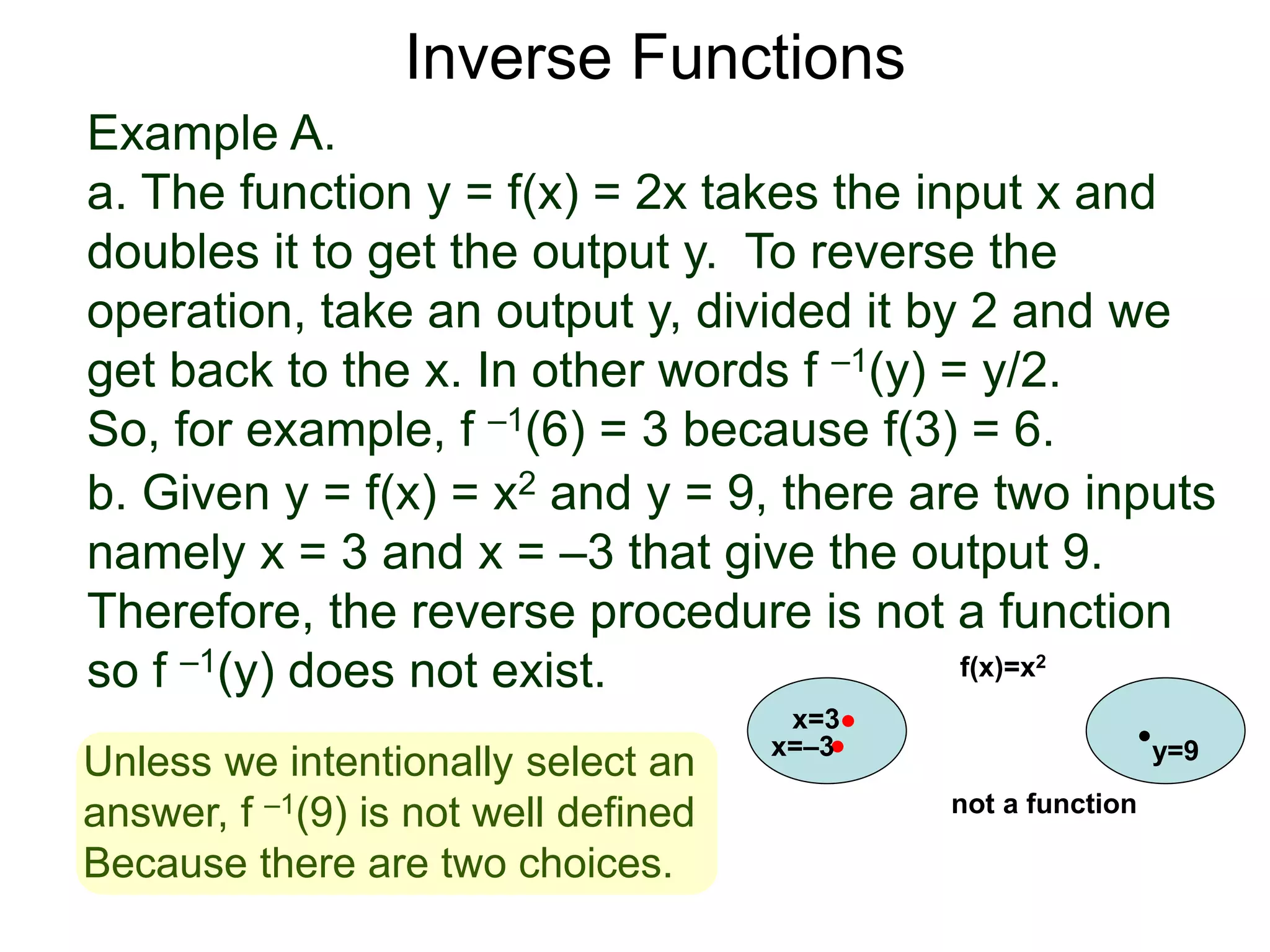
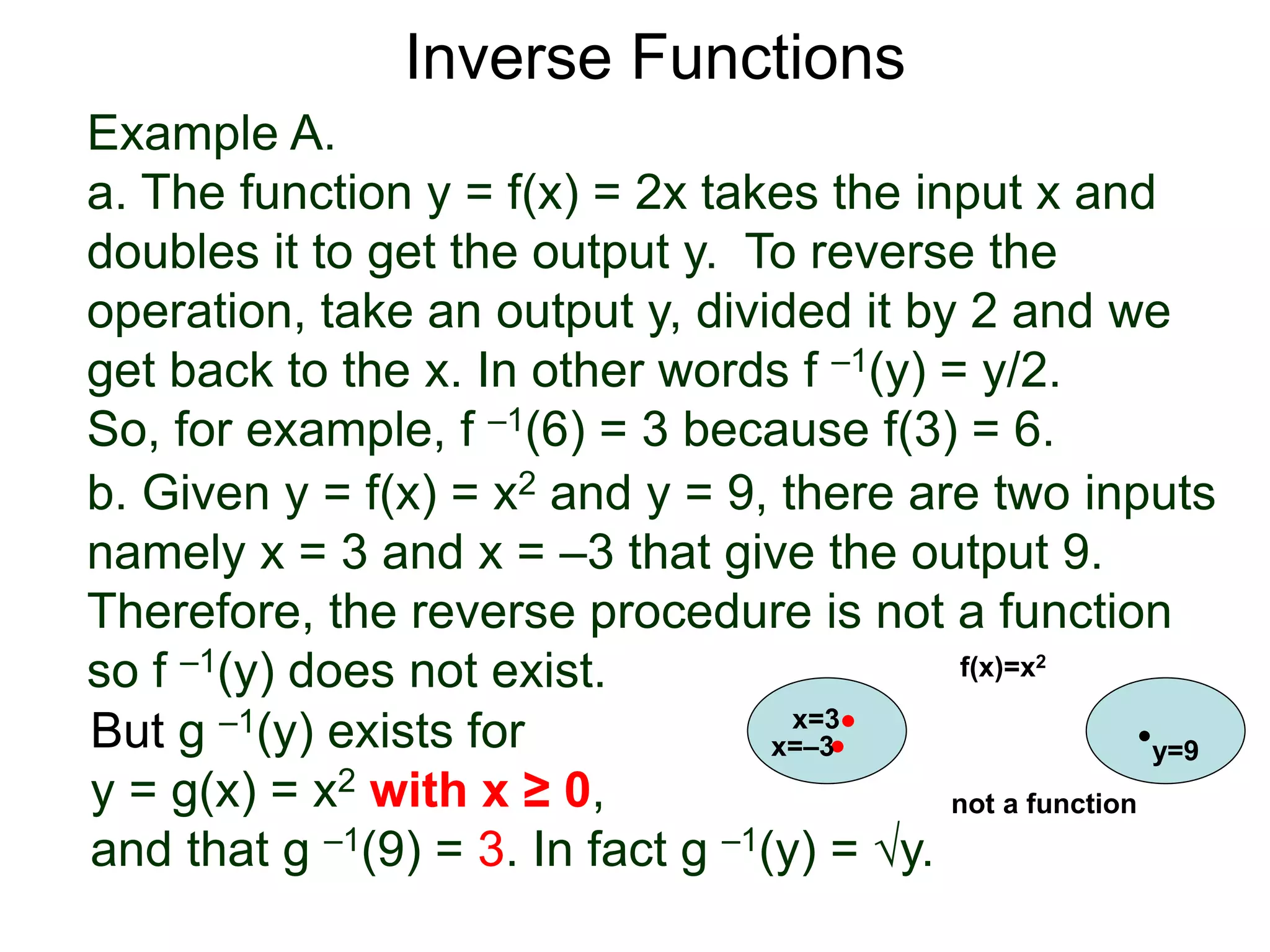
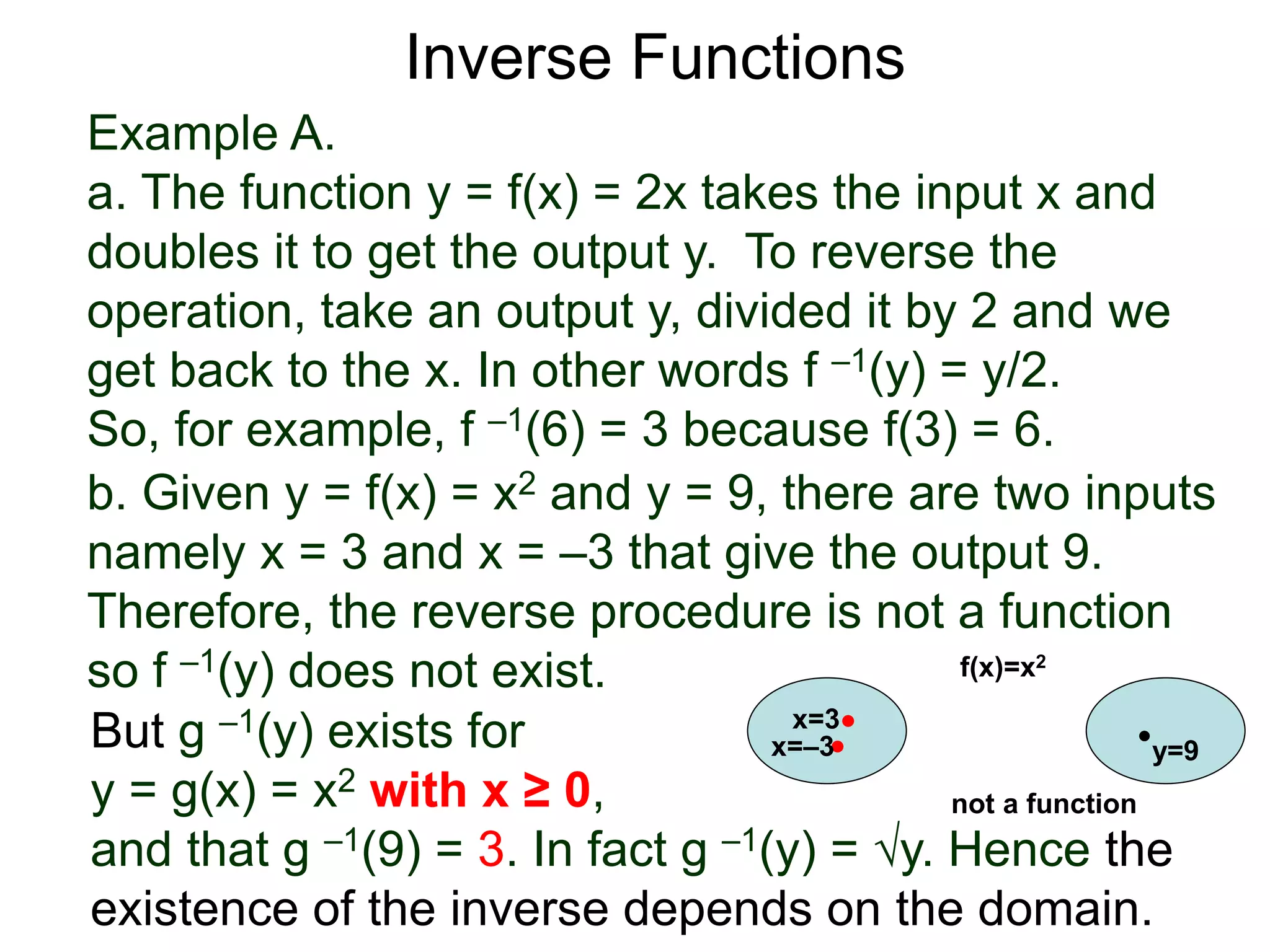
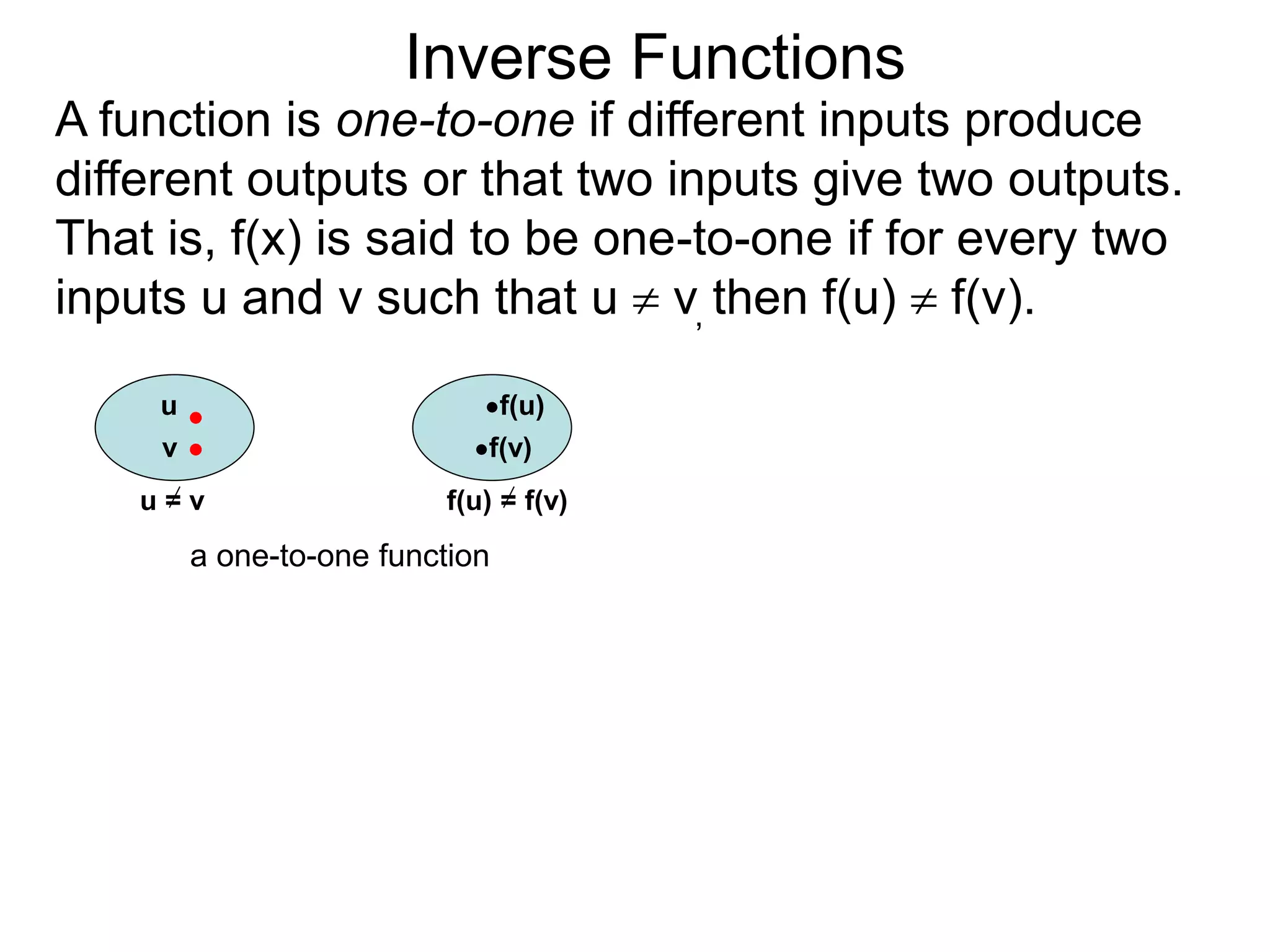
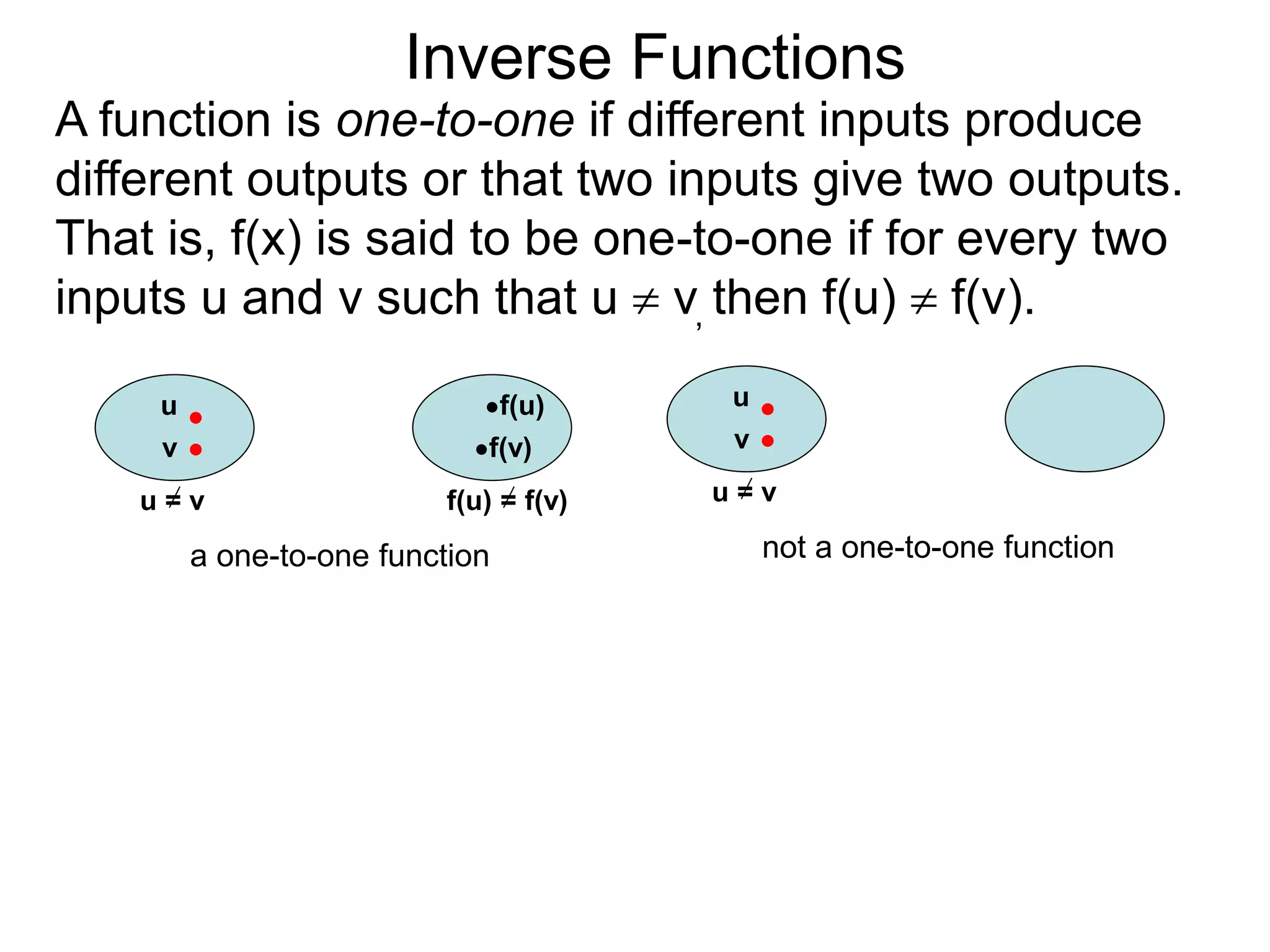
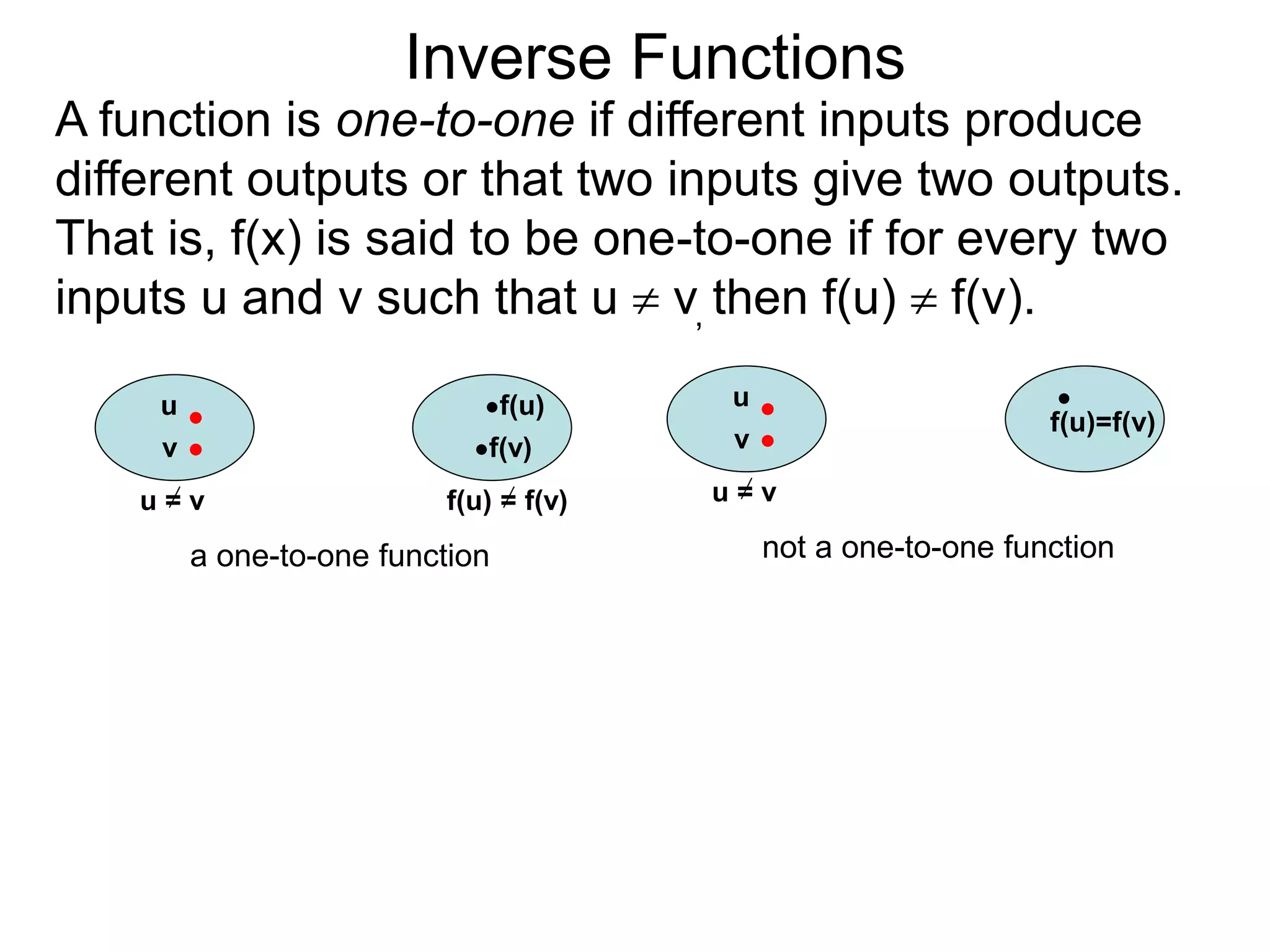
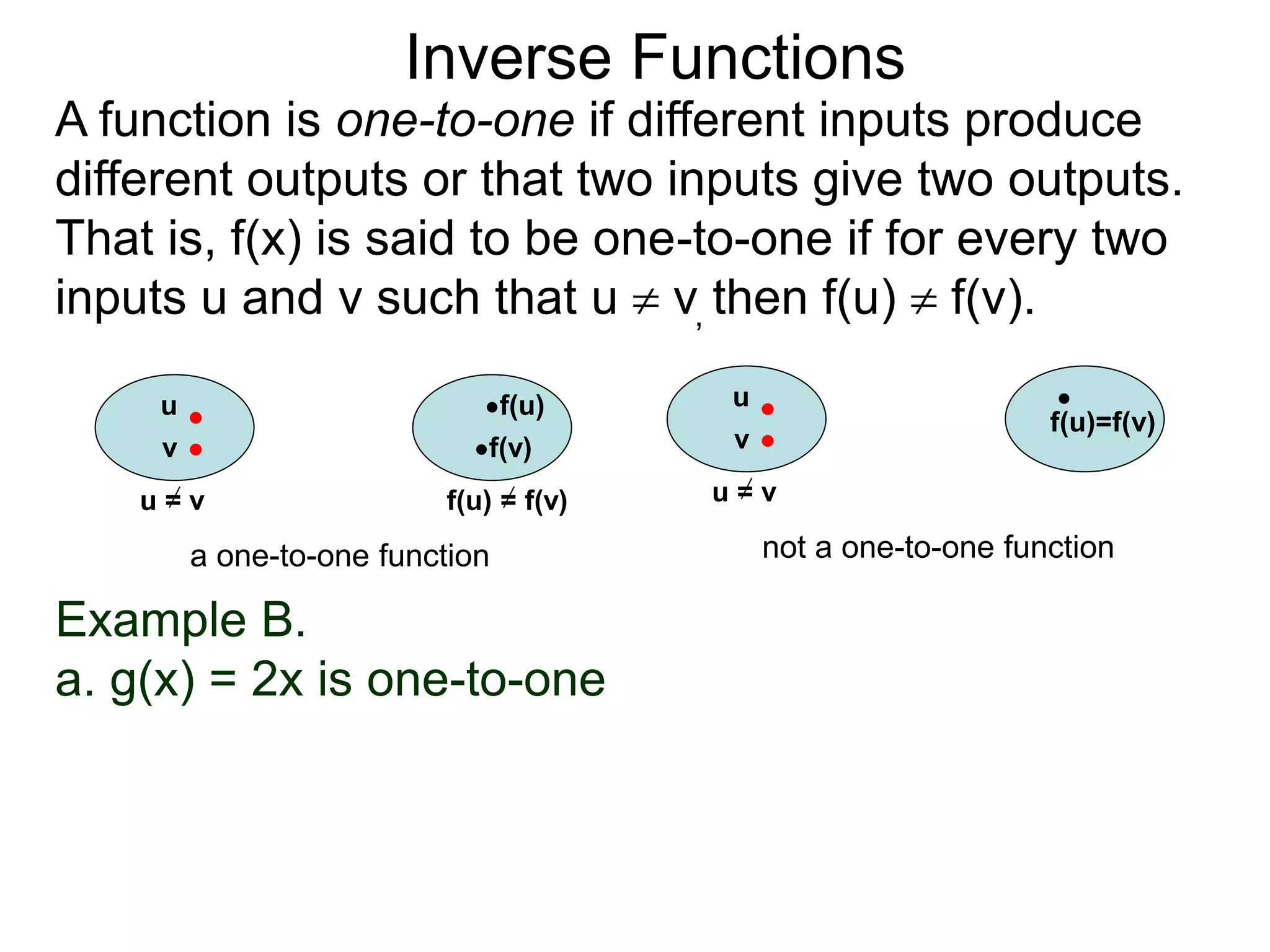
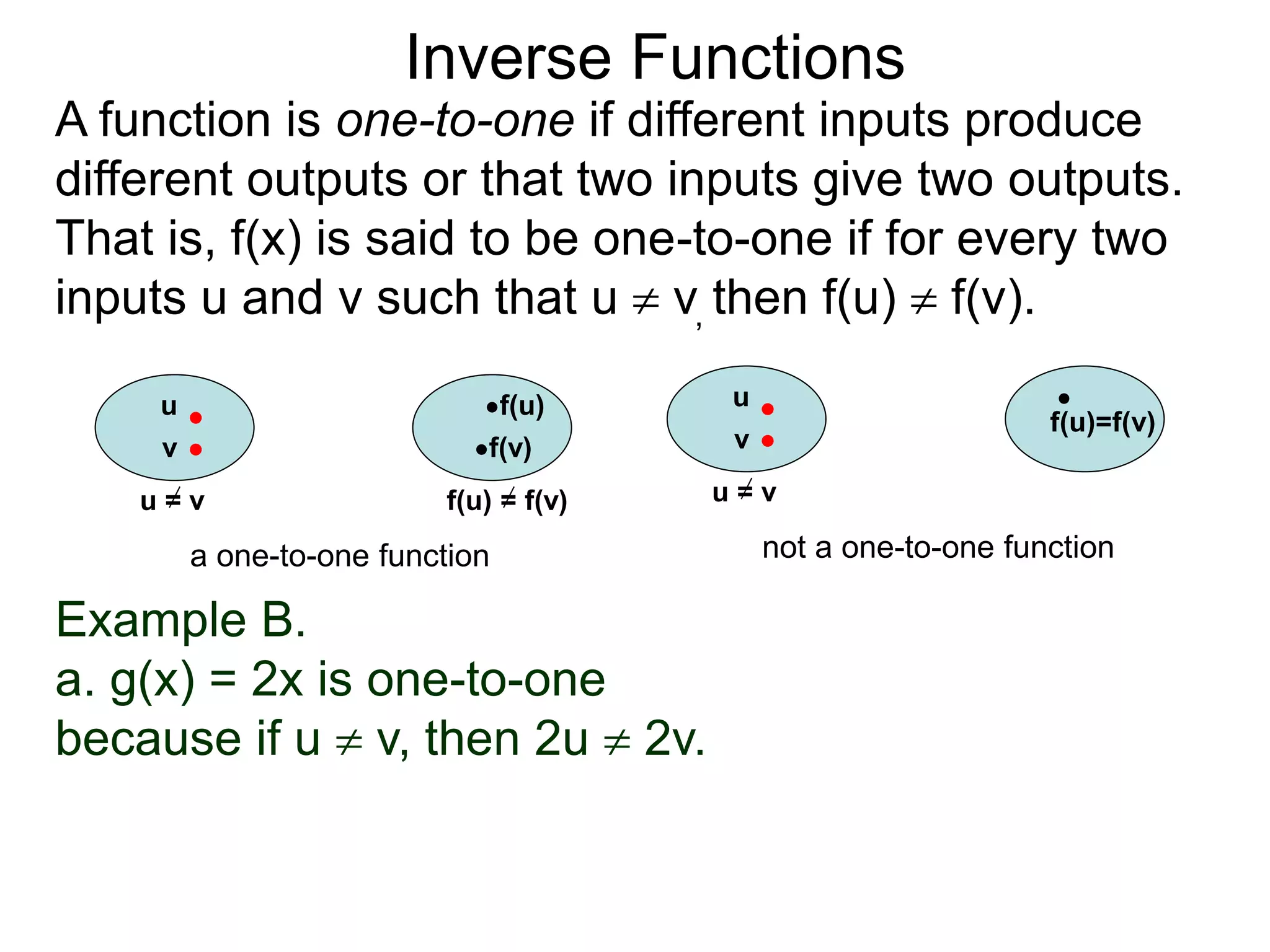
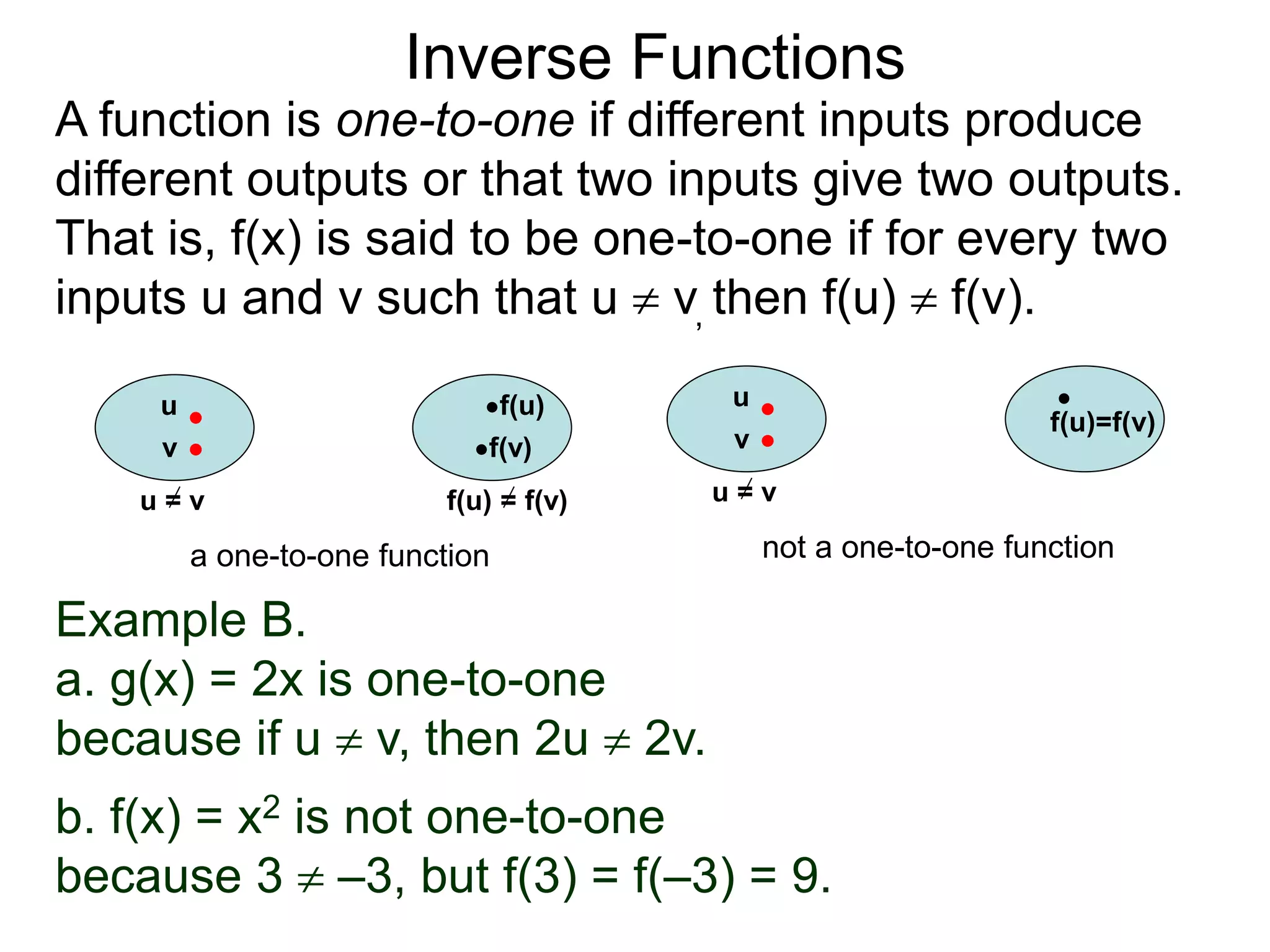
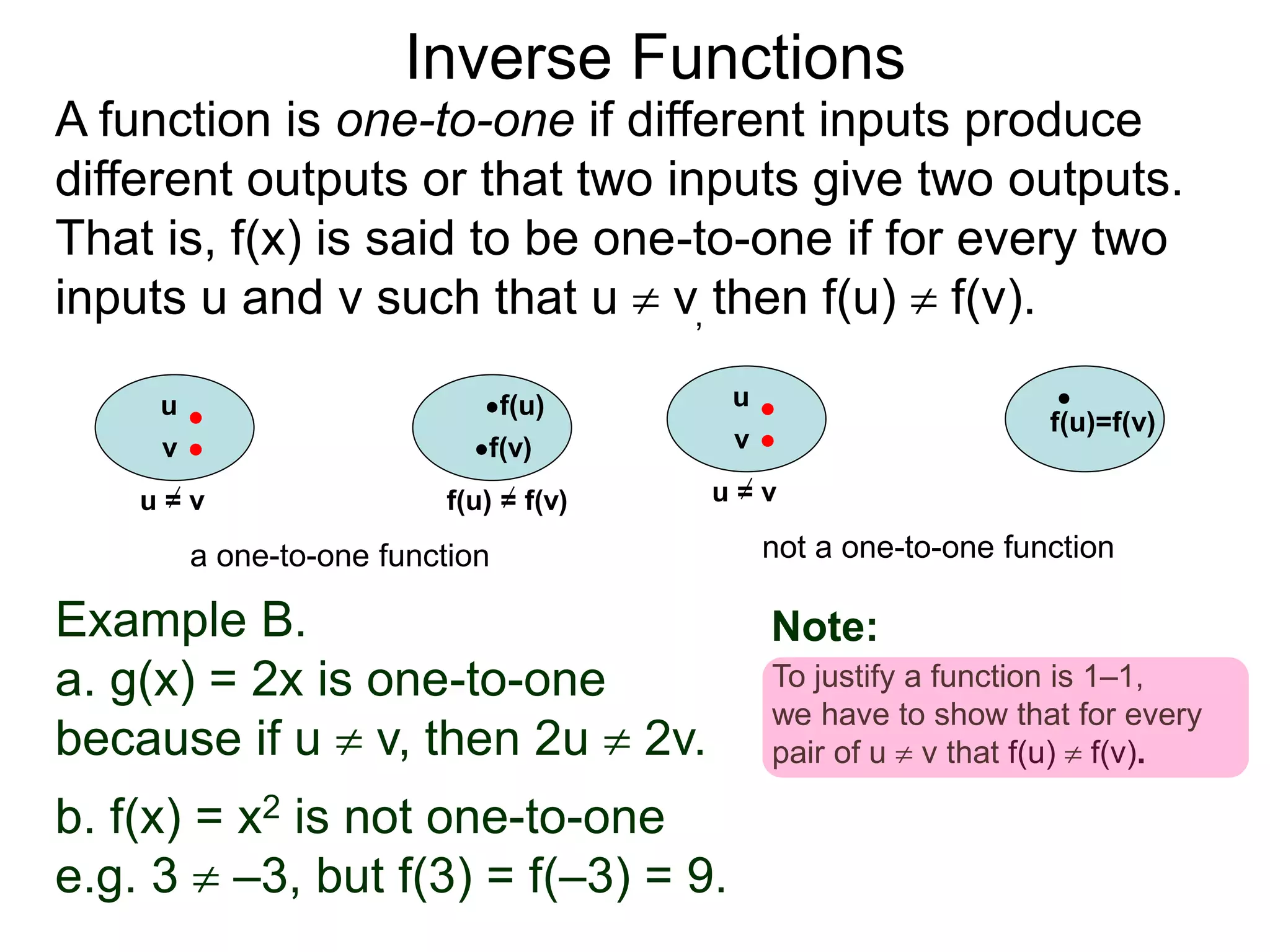
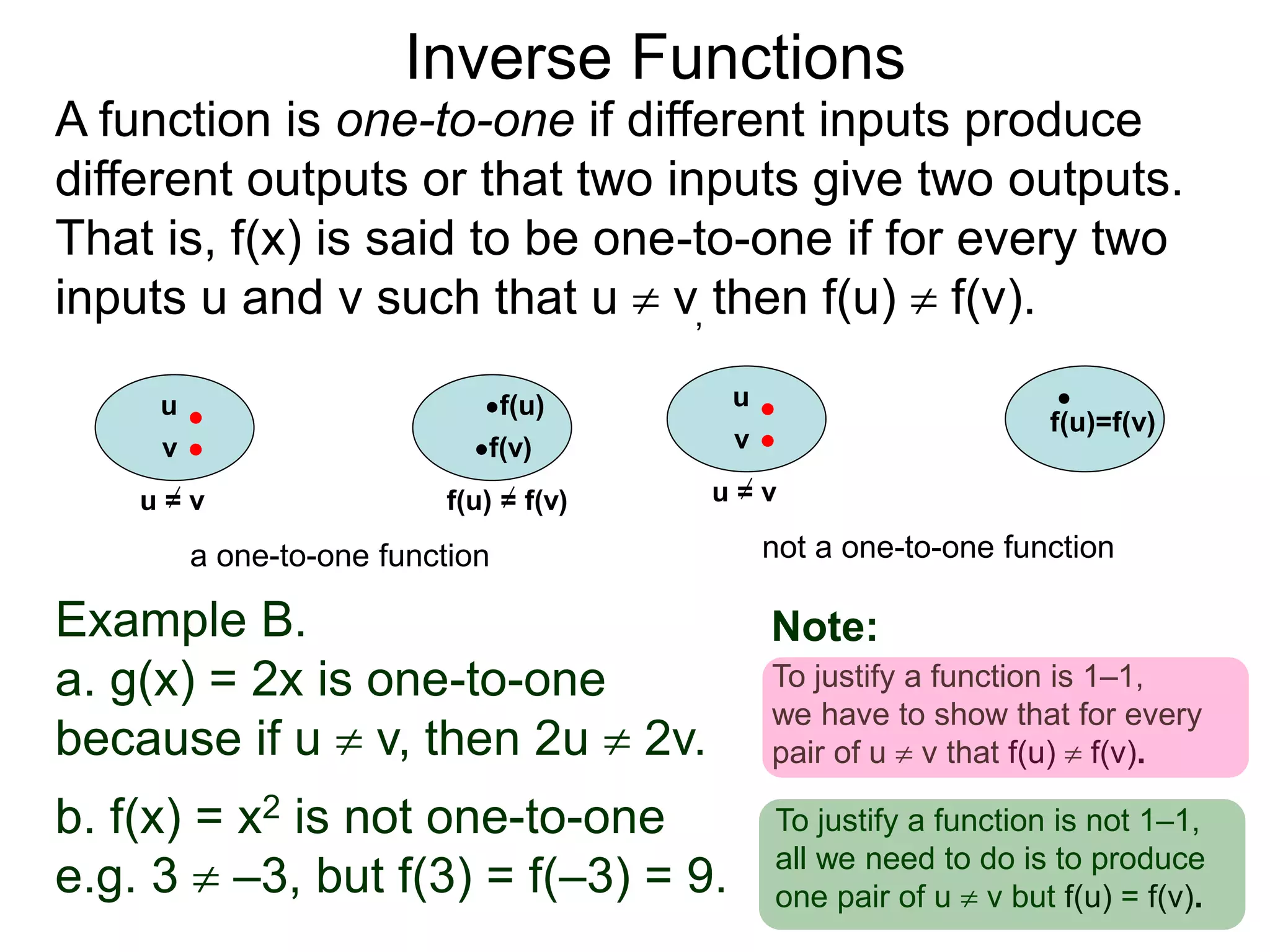
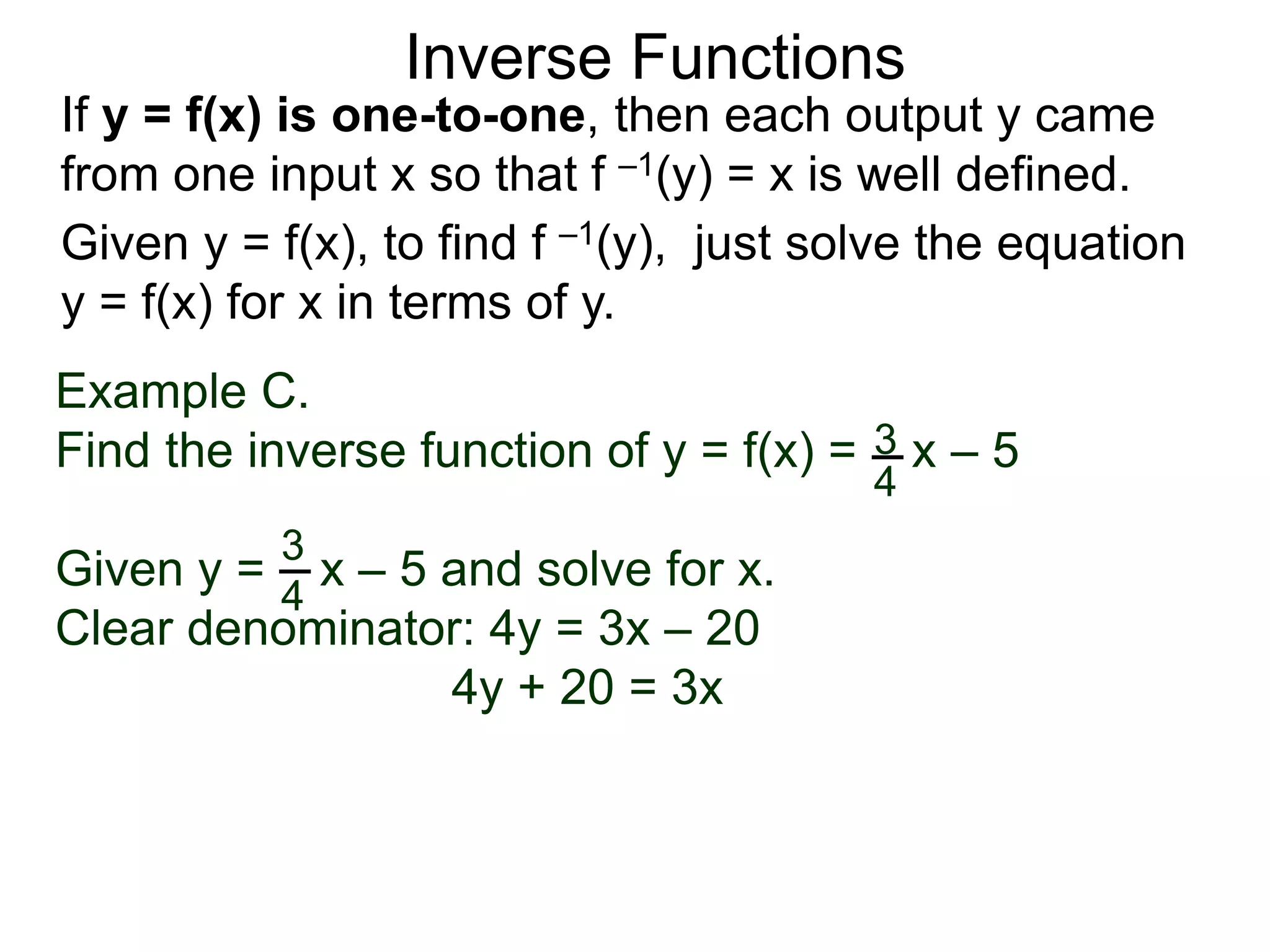
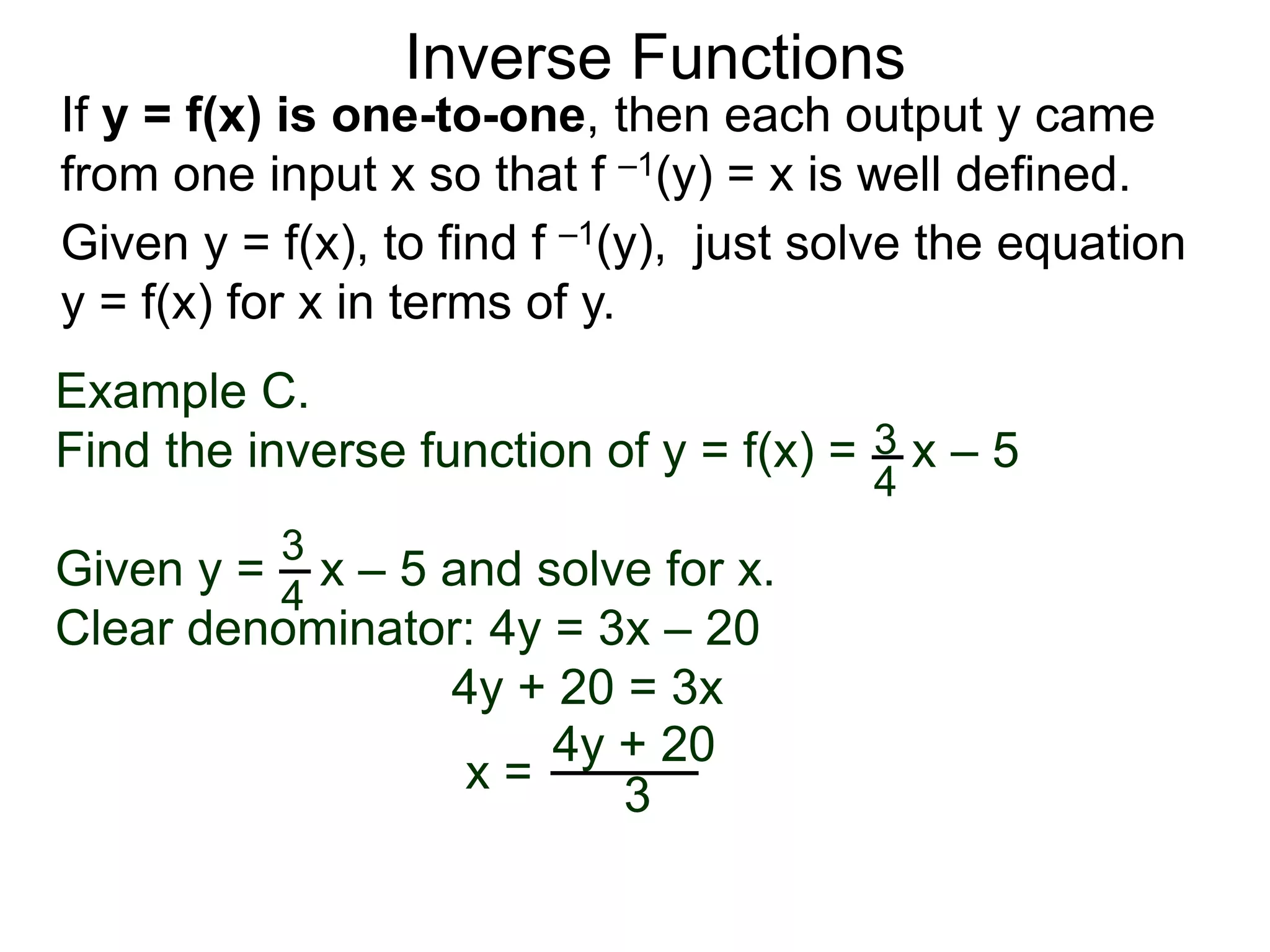
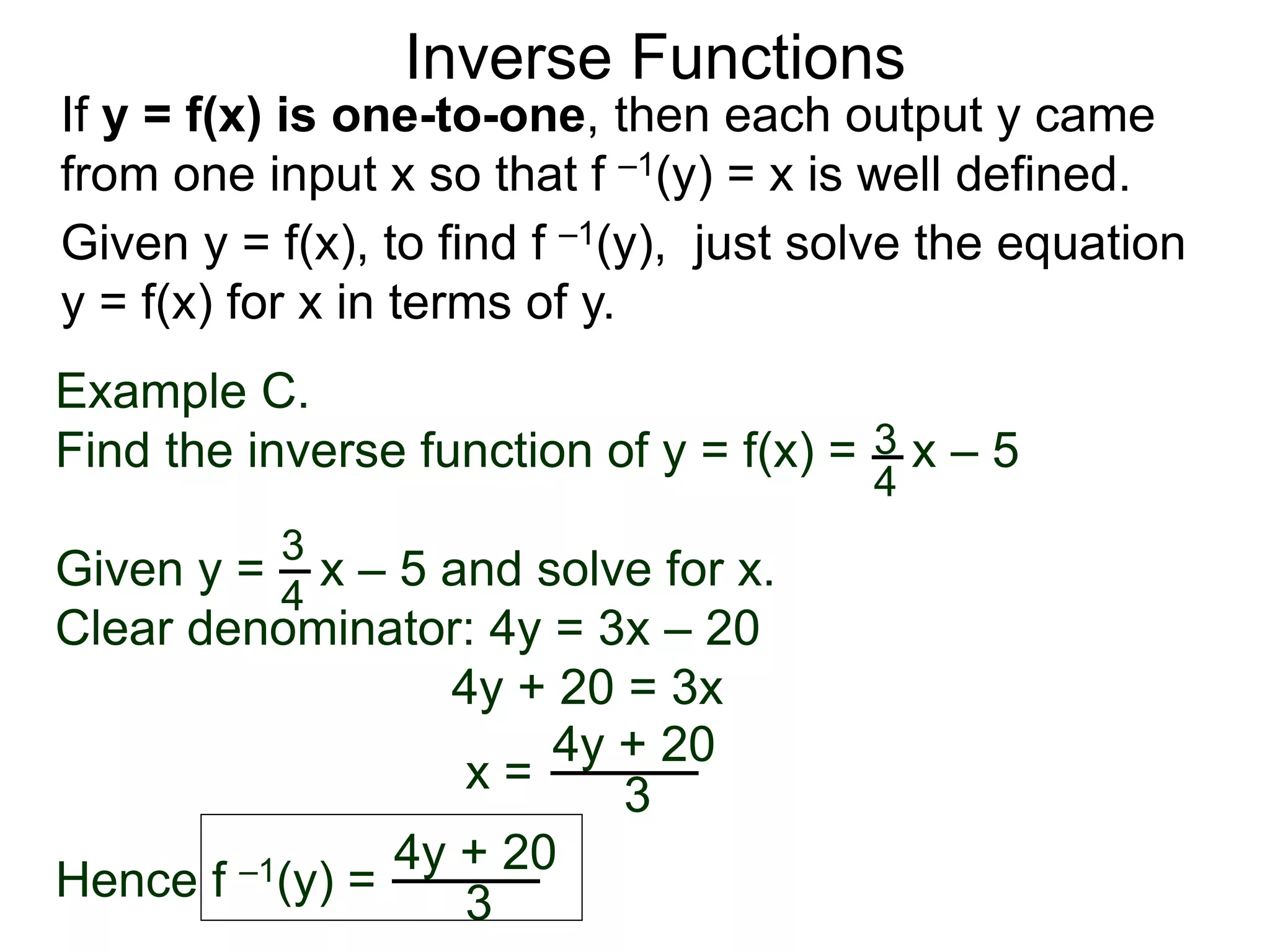
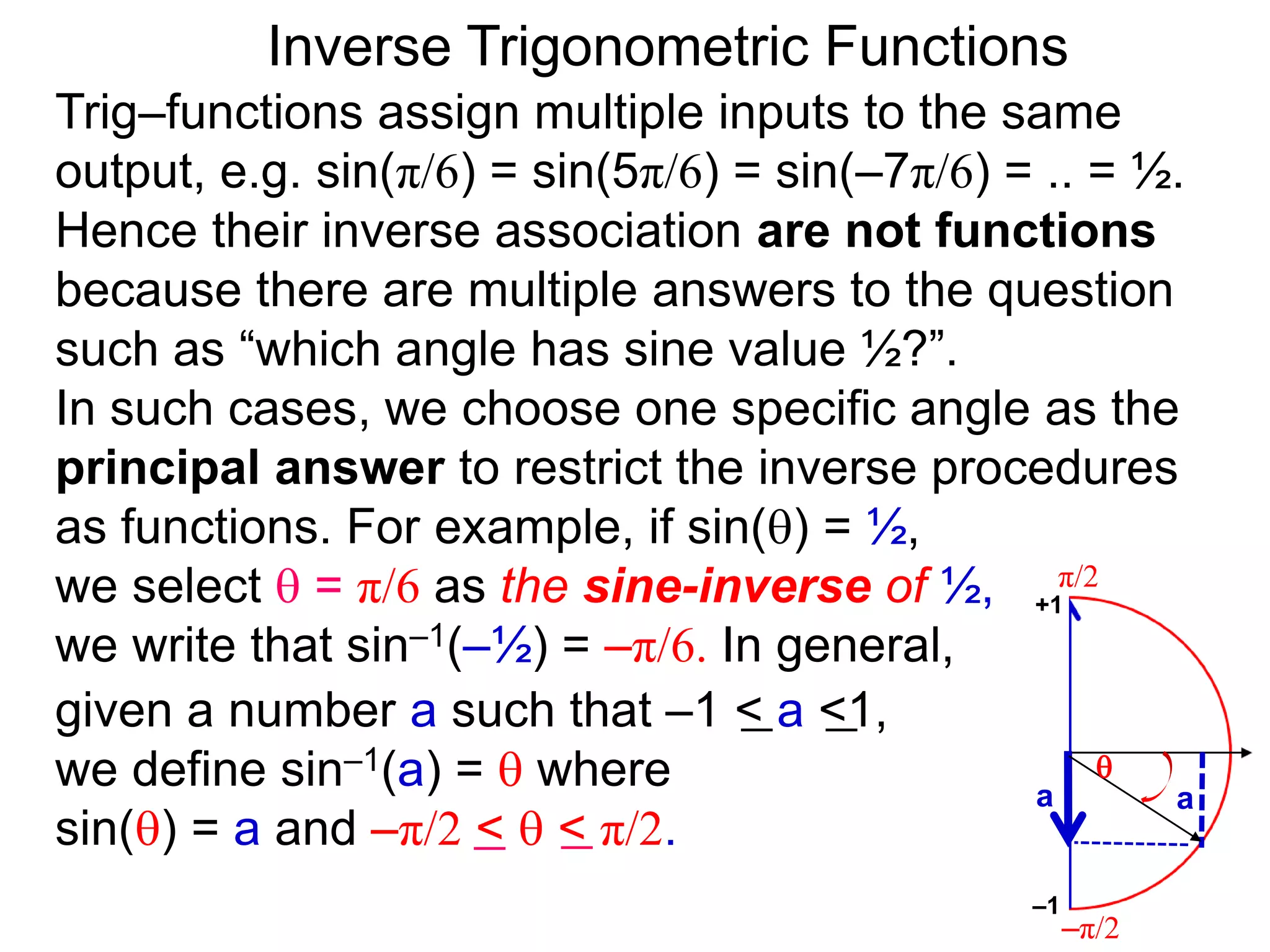
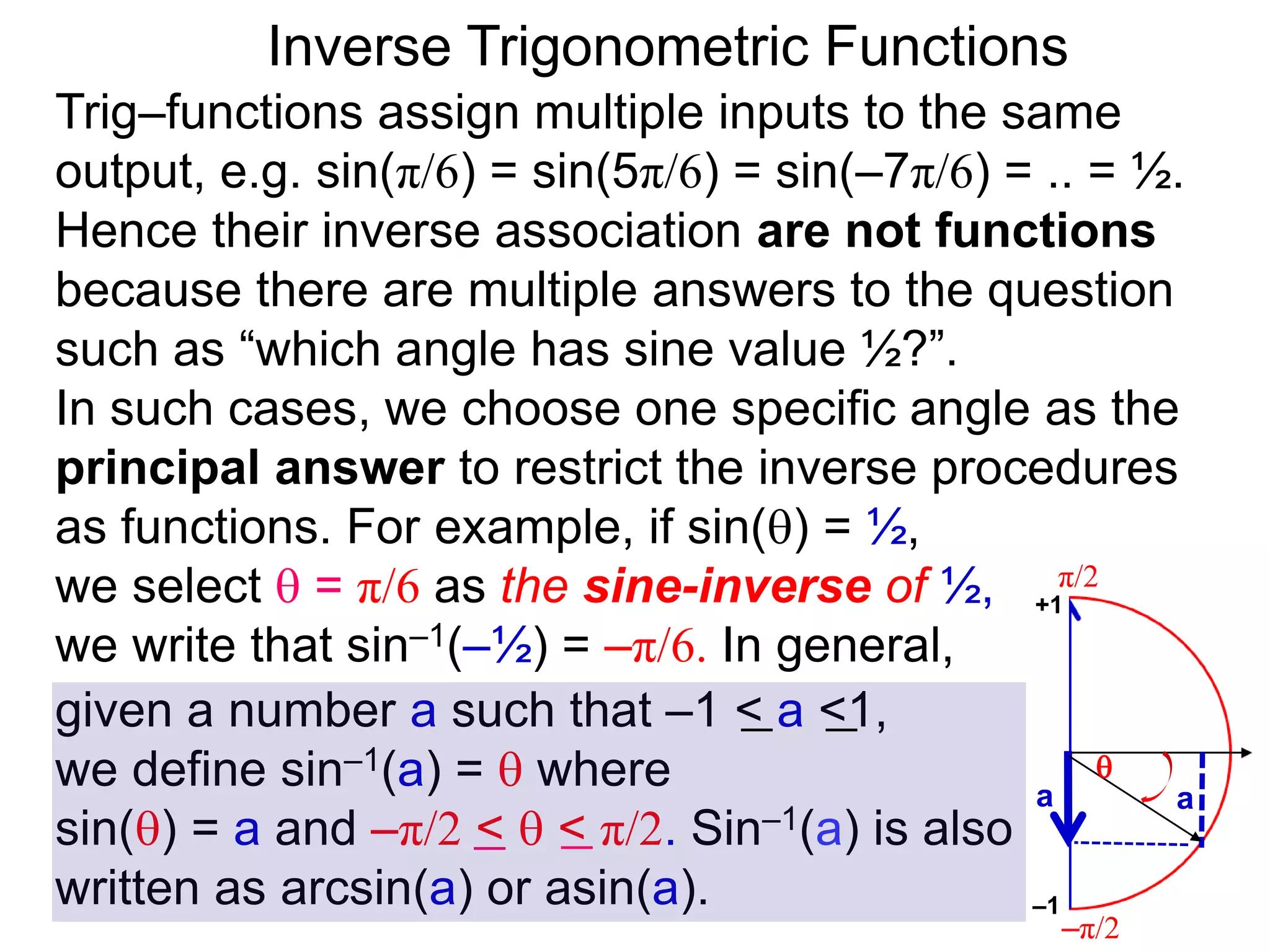
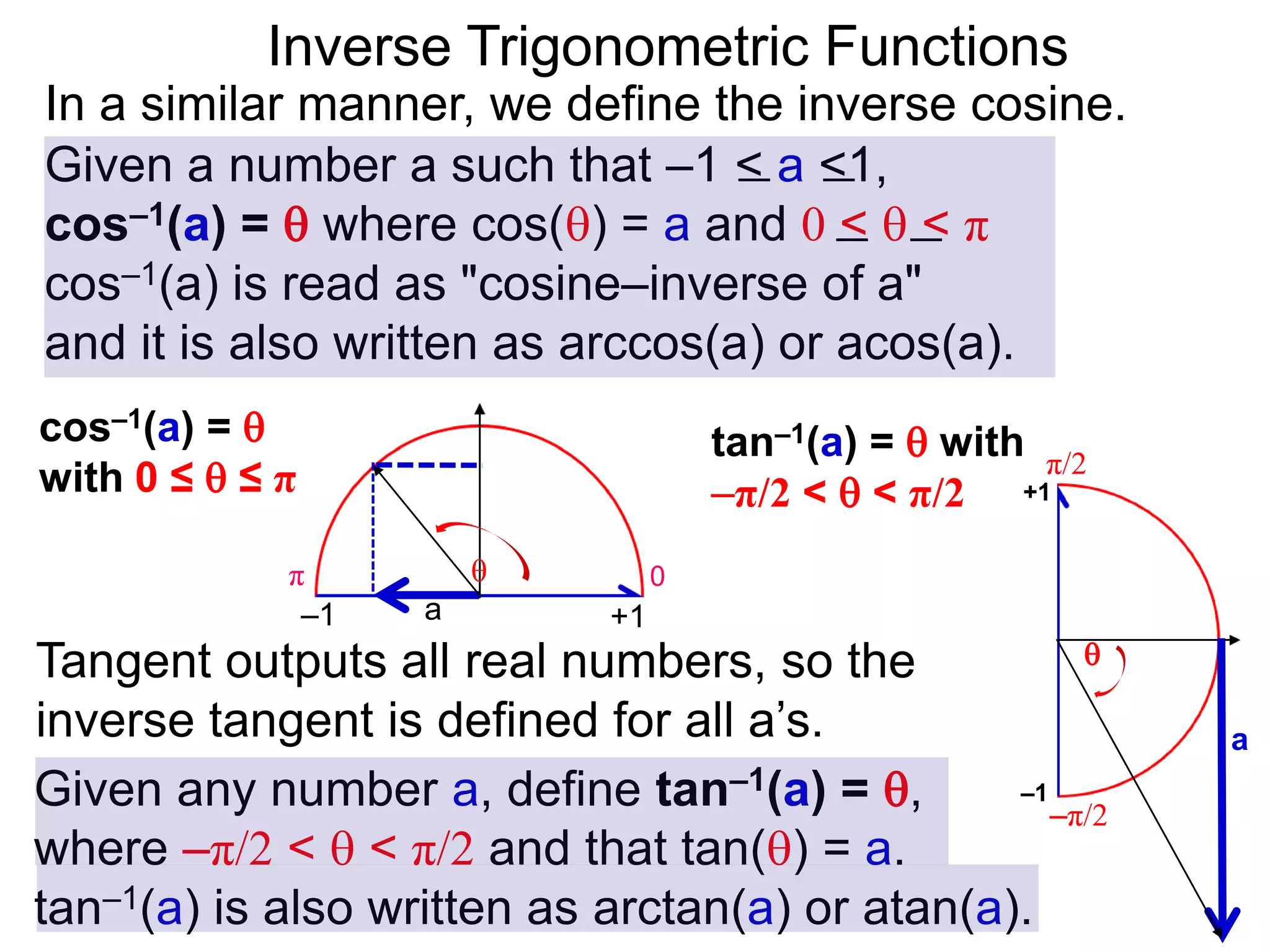
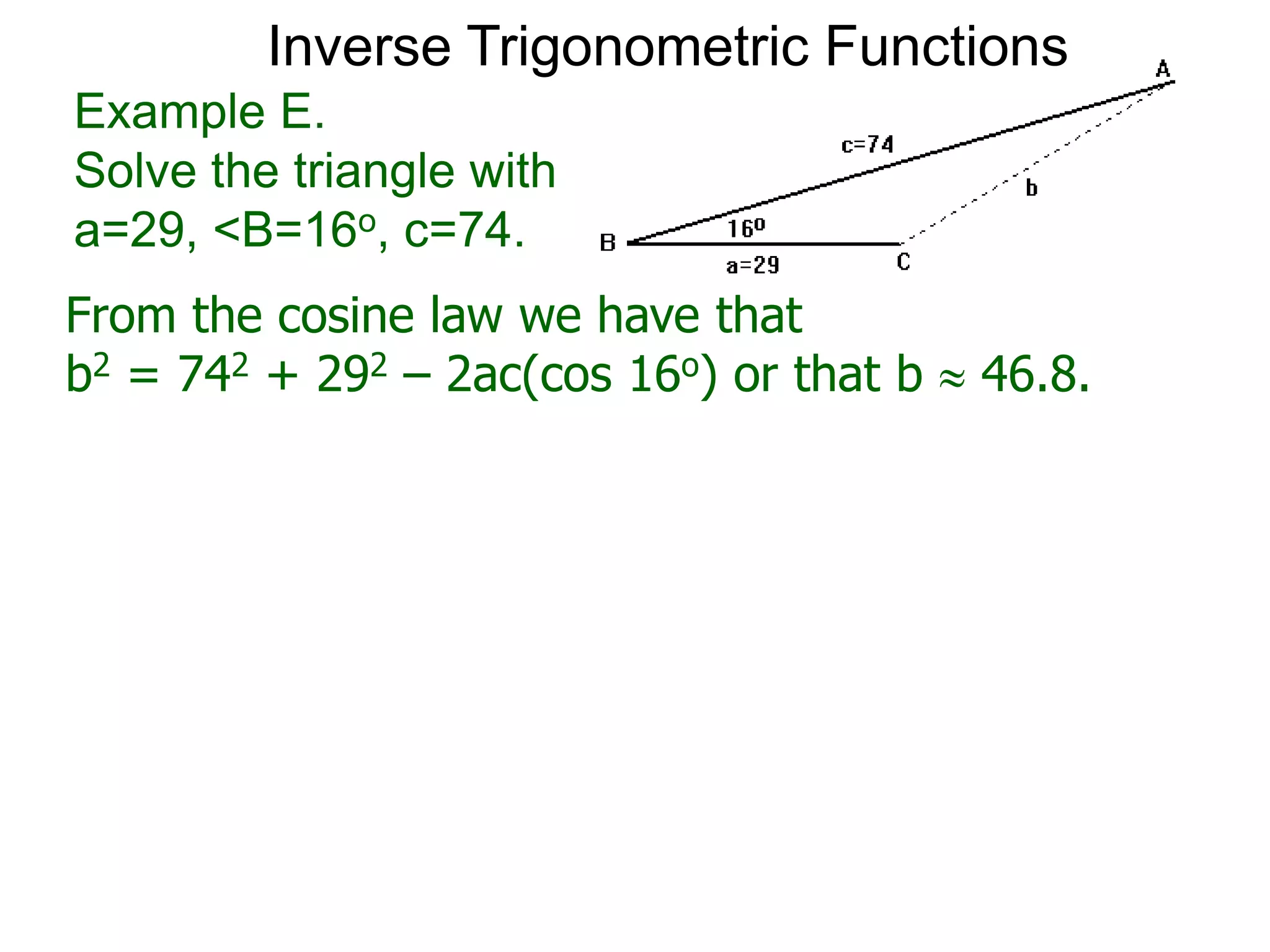
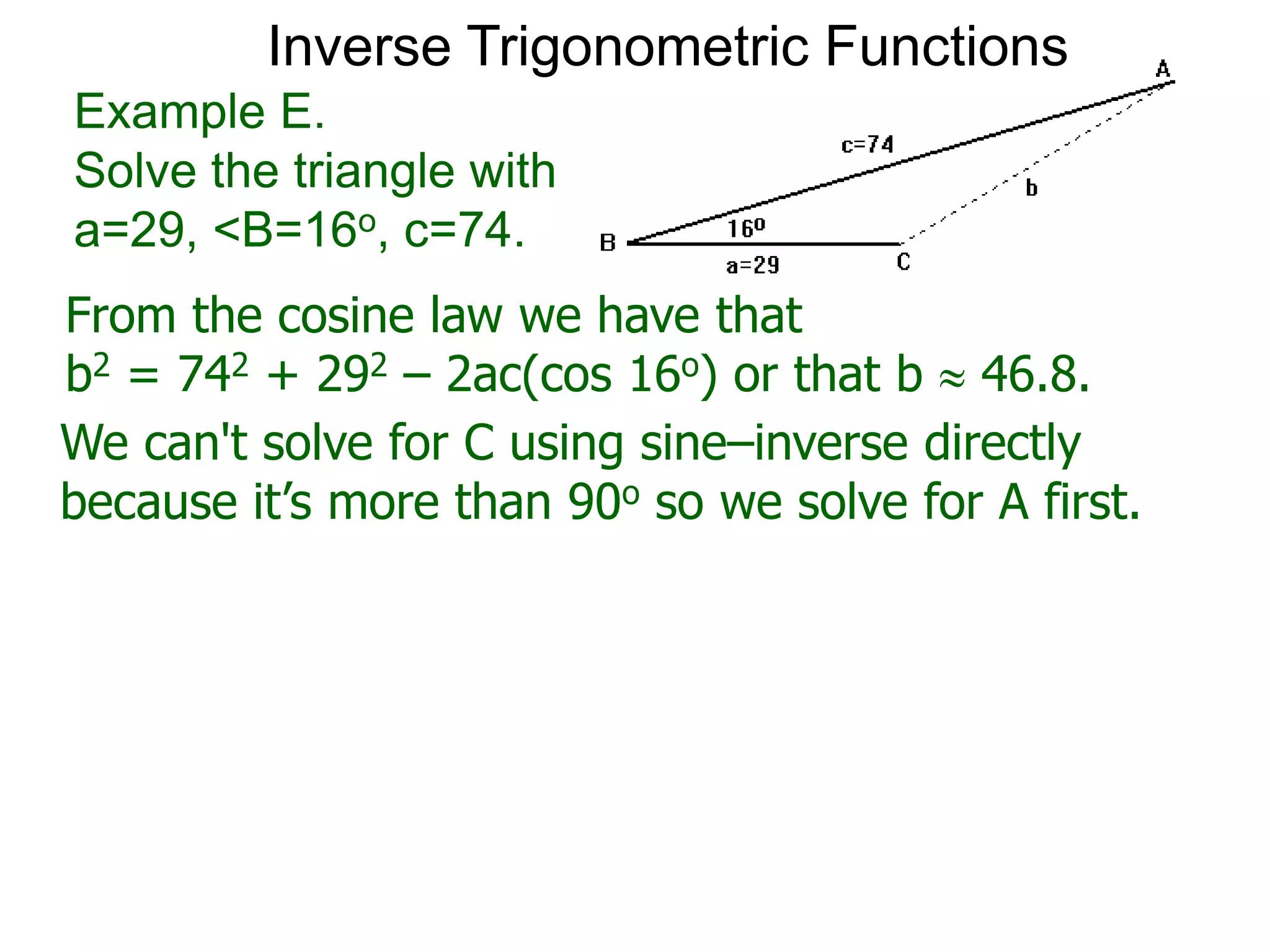
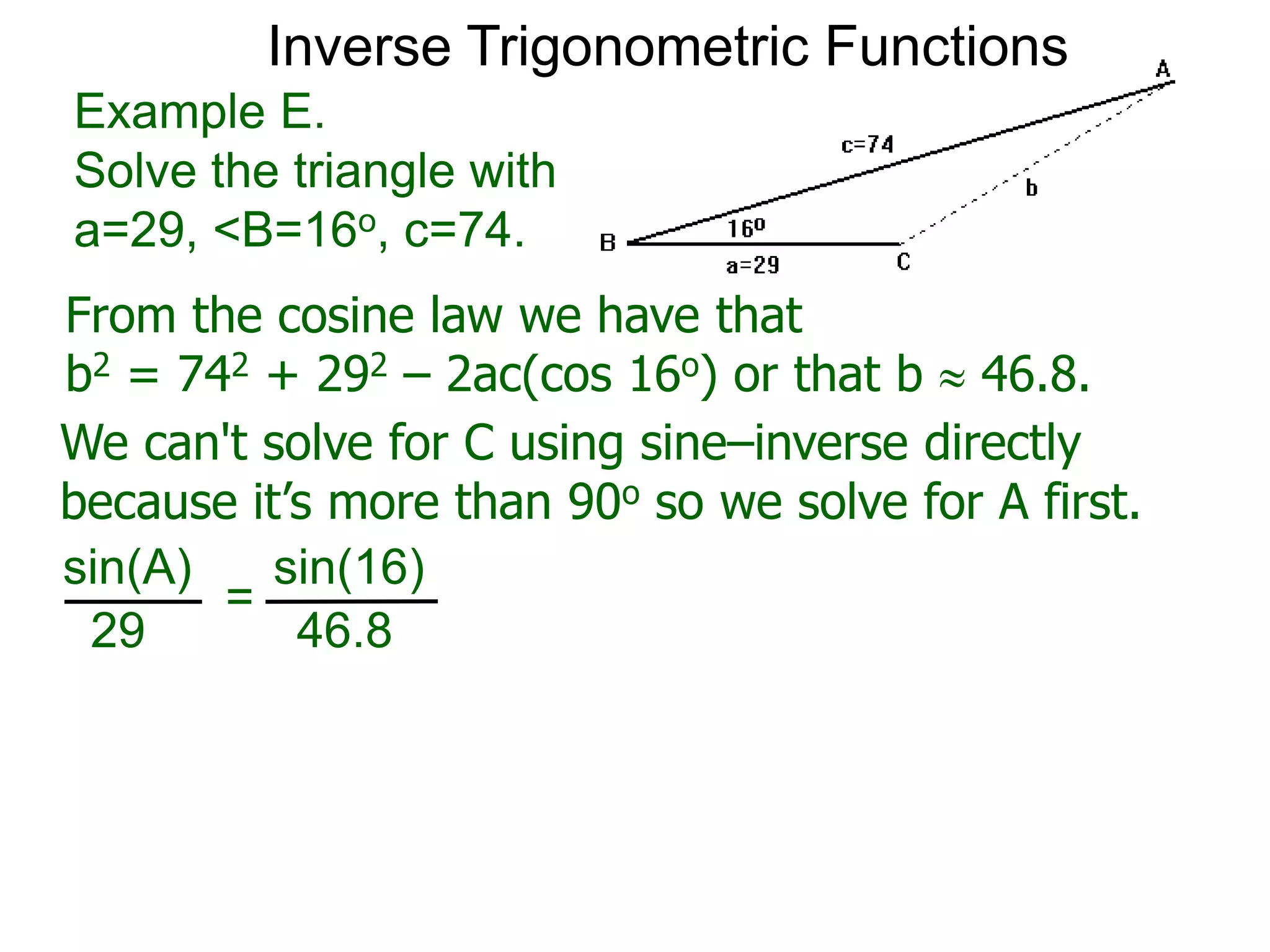
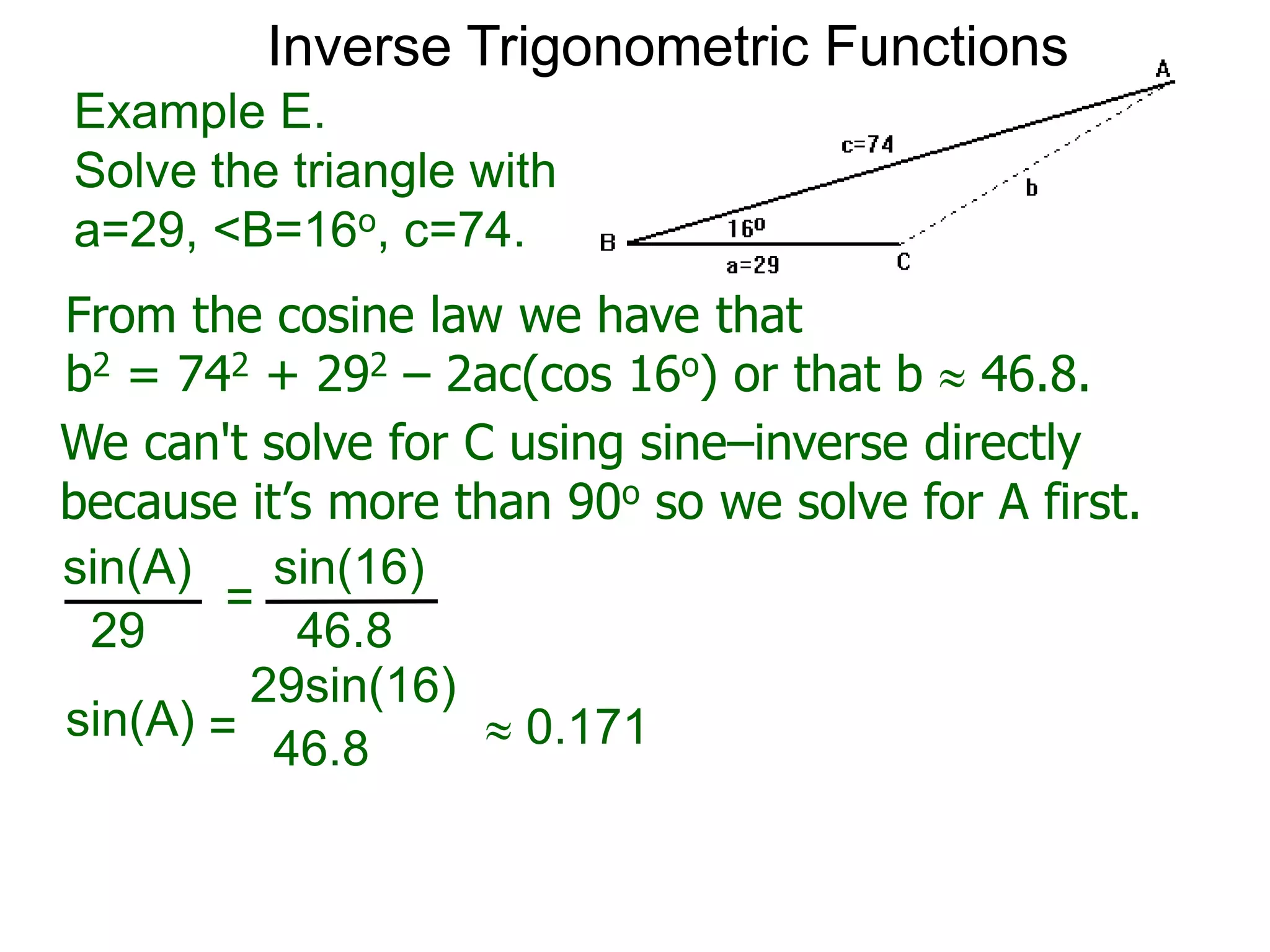
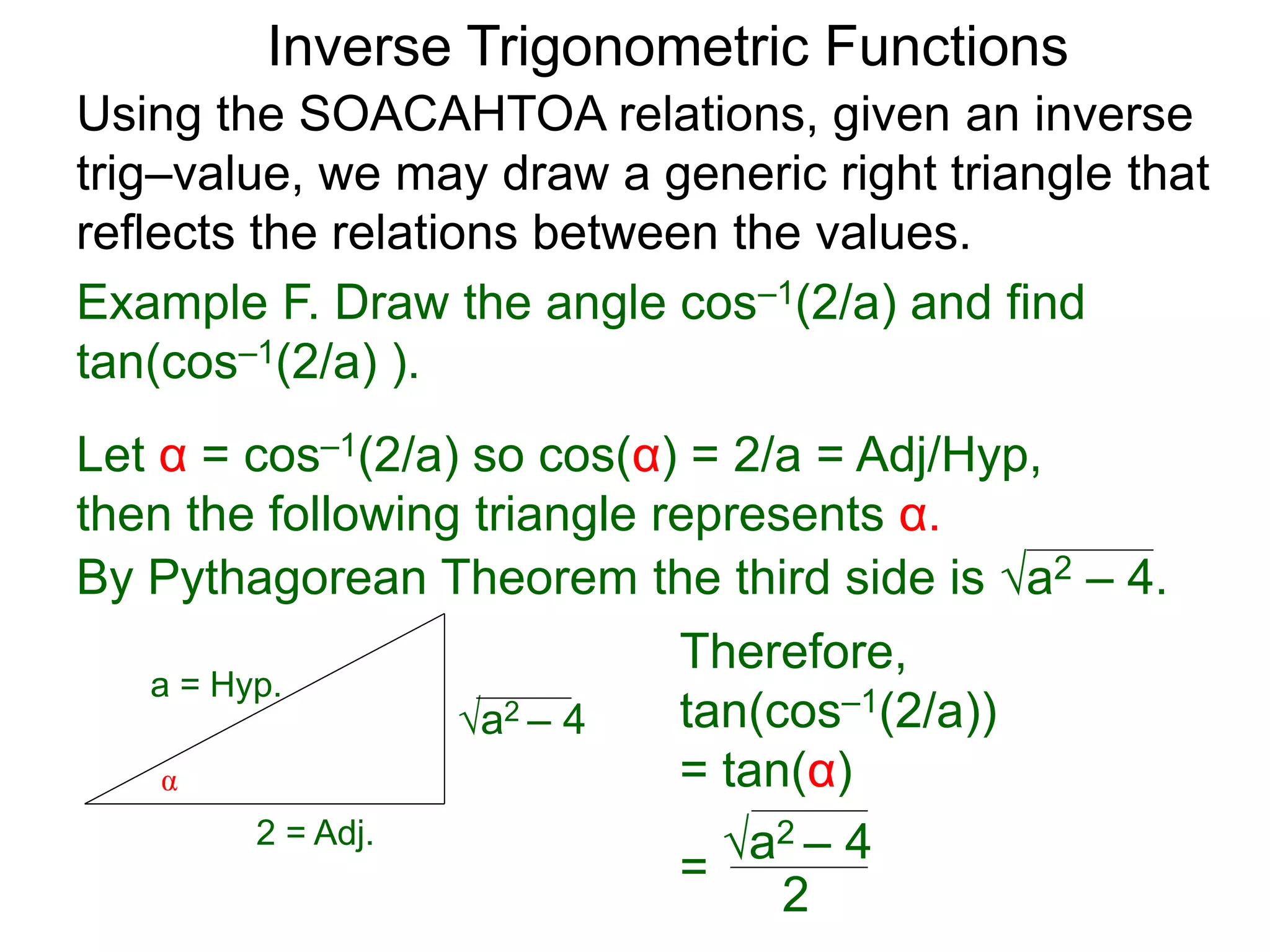
- The document discusses inverse functions, which reverse the input-output relationship of a function.
- For a function f(x) to have an inverse f-1(y), it must be one-to-one, meaning different inputs give different outputs.
- Examples show how to find the inverse of functions like f(x)=2x by taking the output and reversing the operation, and that some functions like f(x)=x2 do not have inverses because they are not one-to-one.
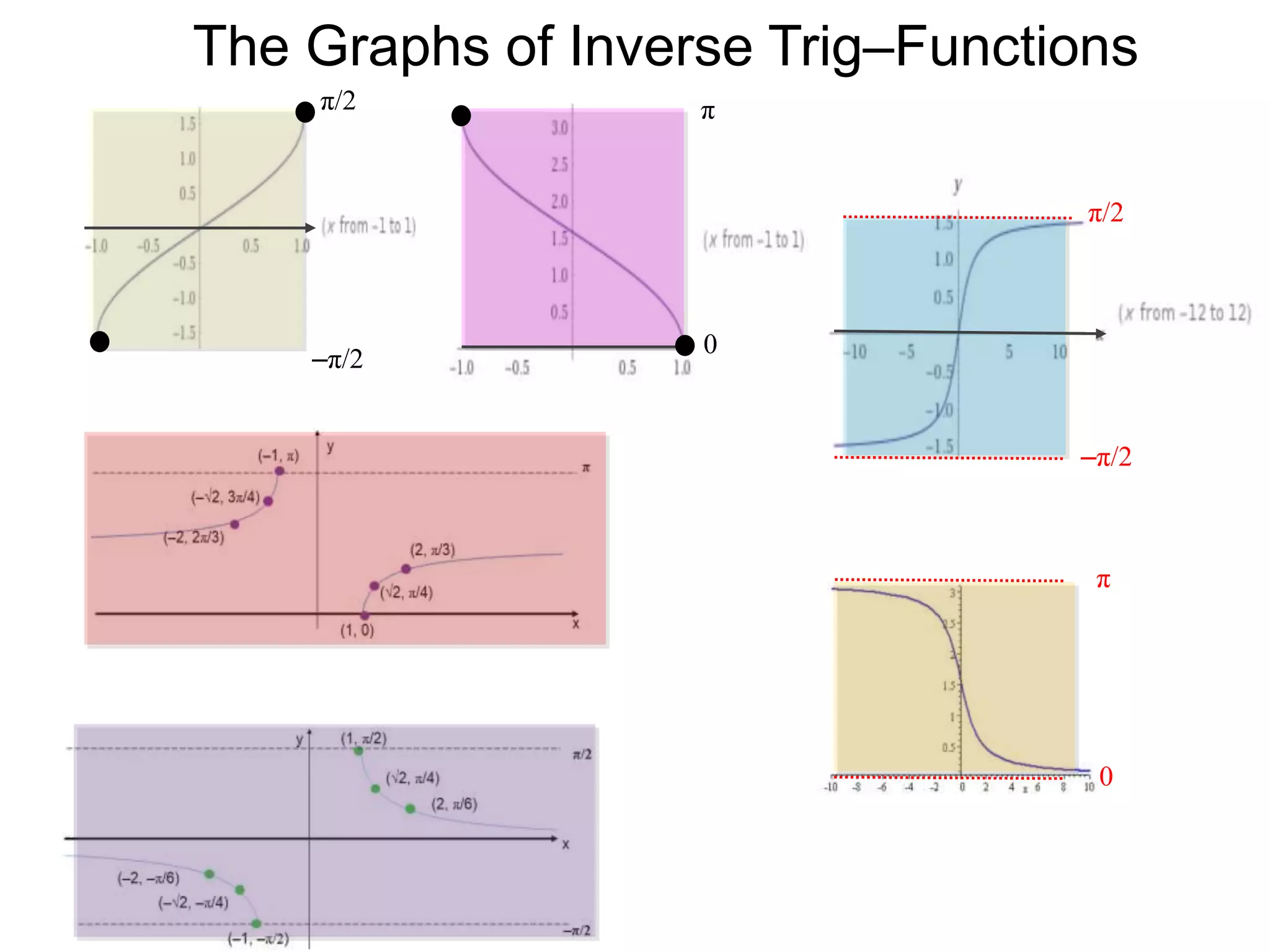

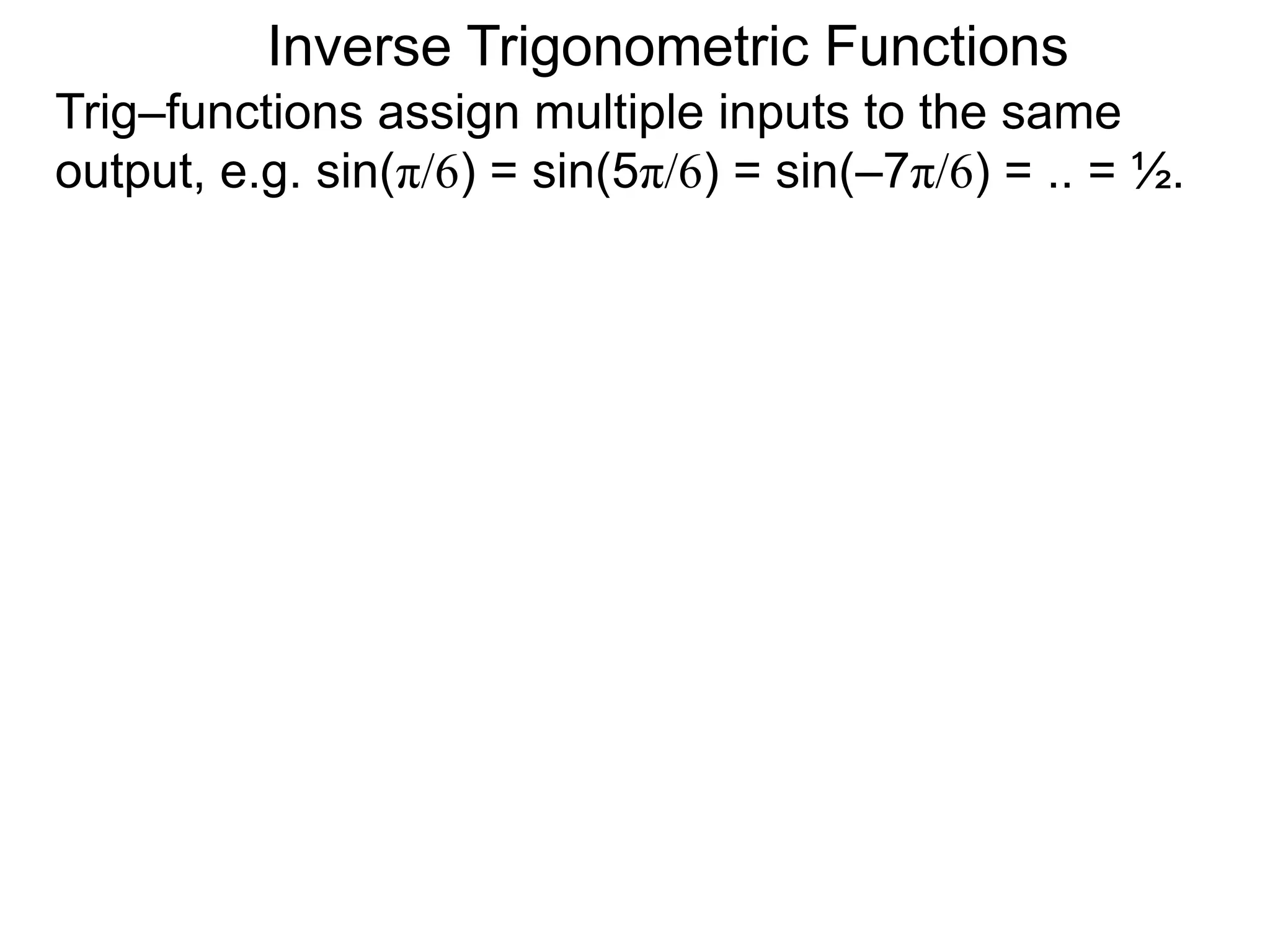
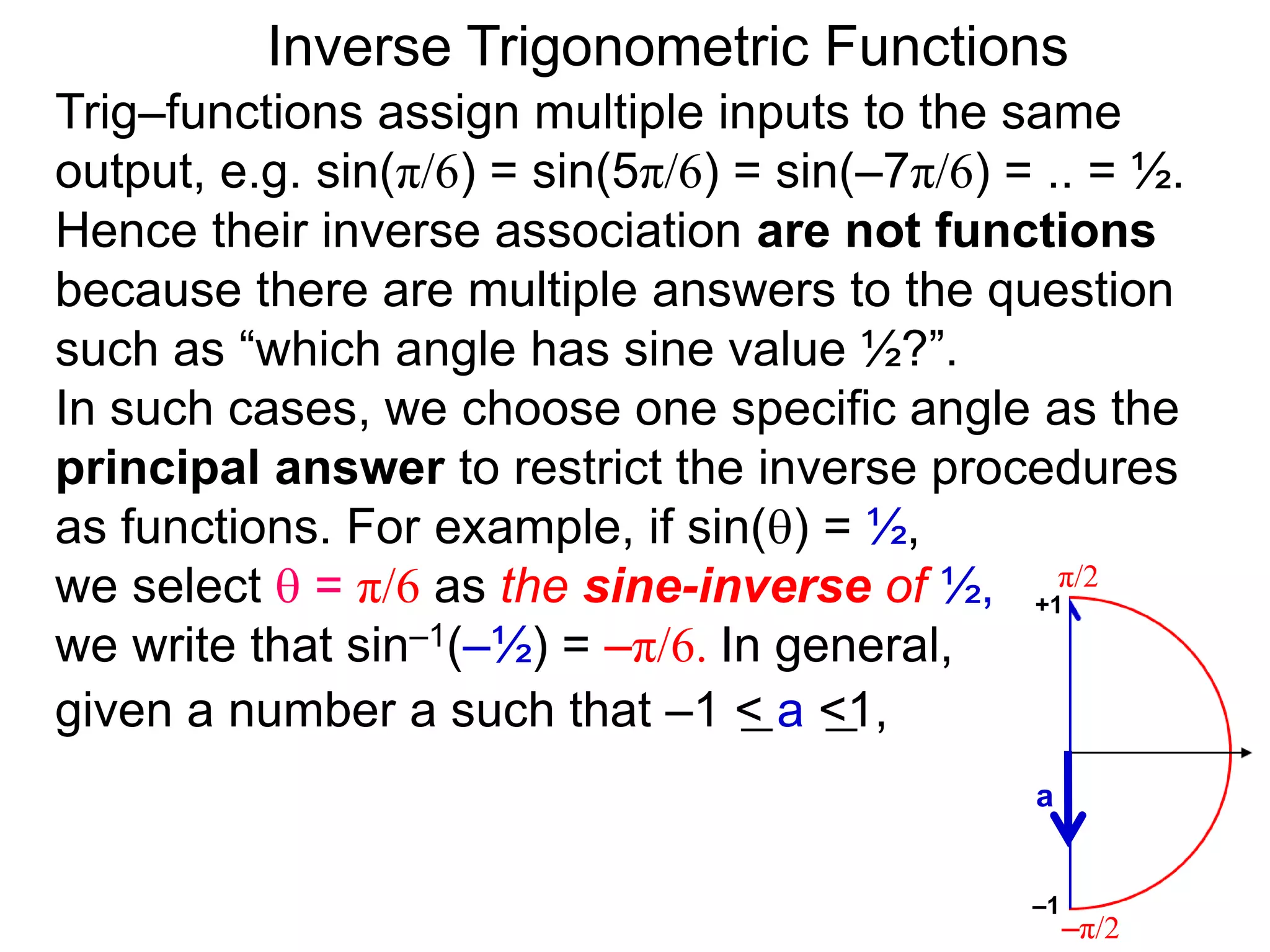

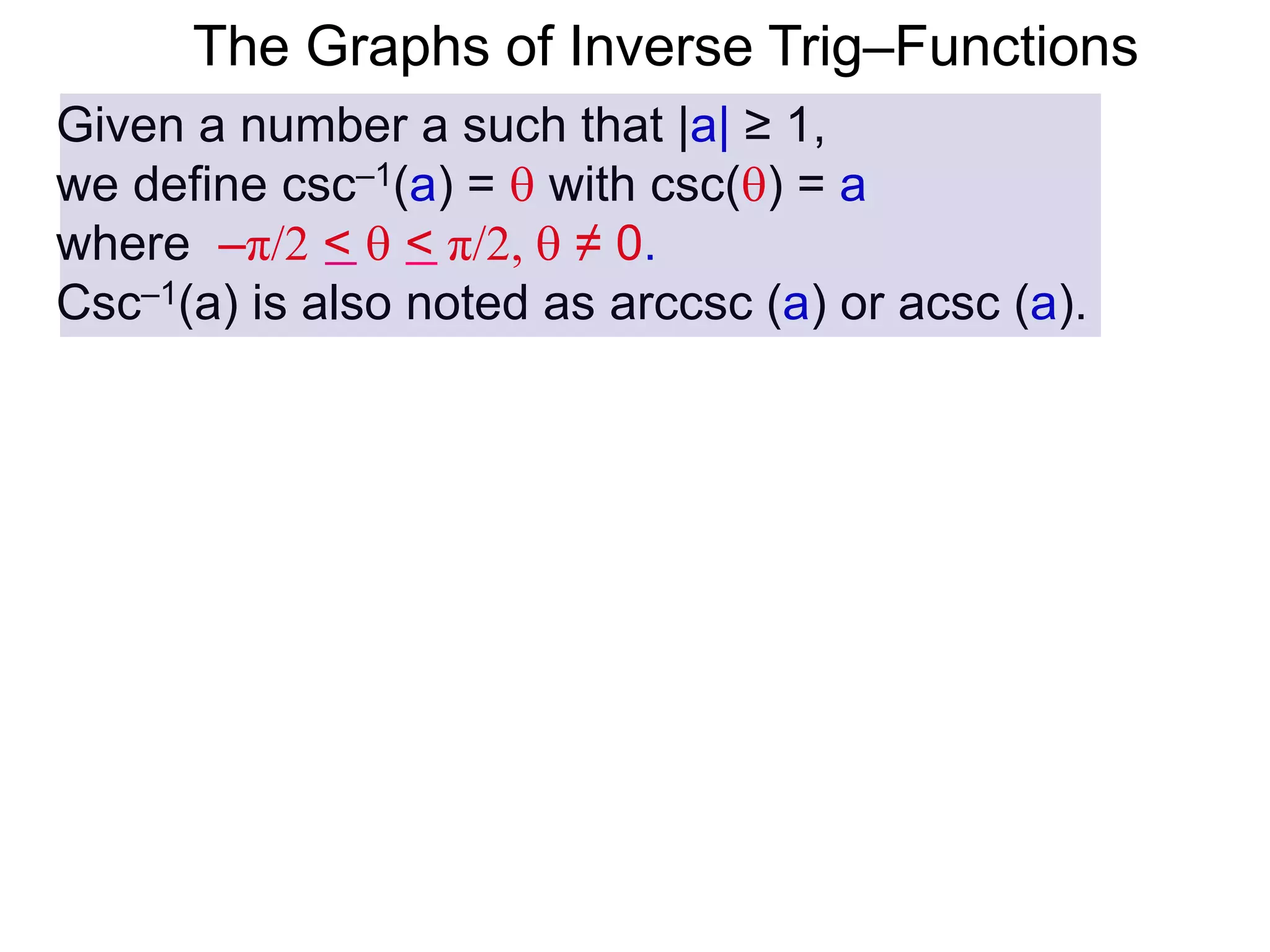
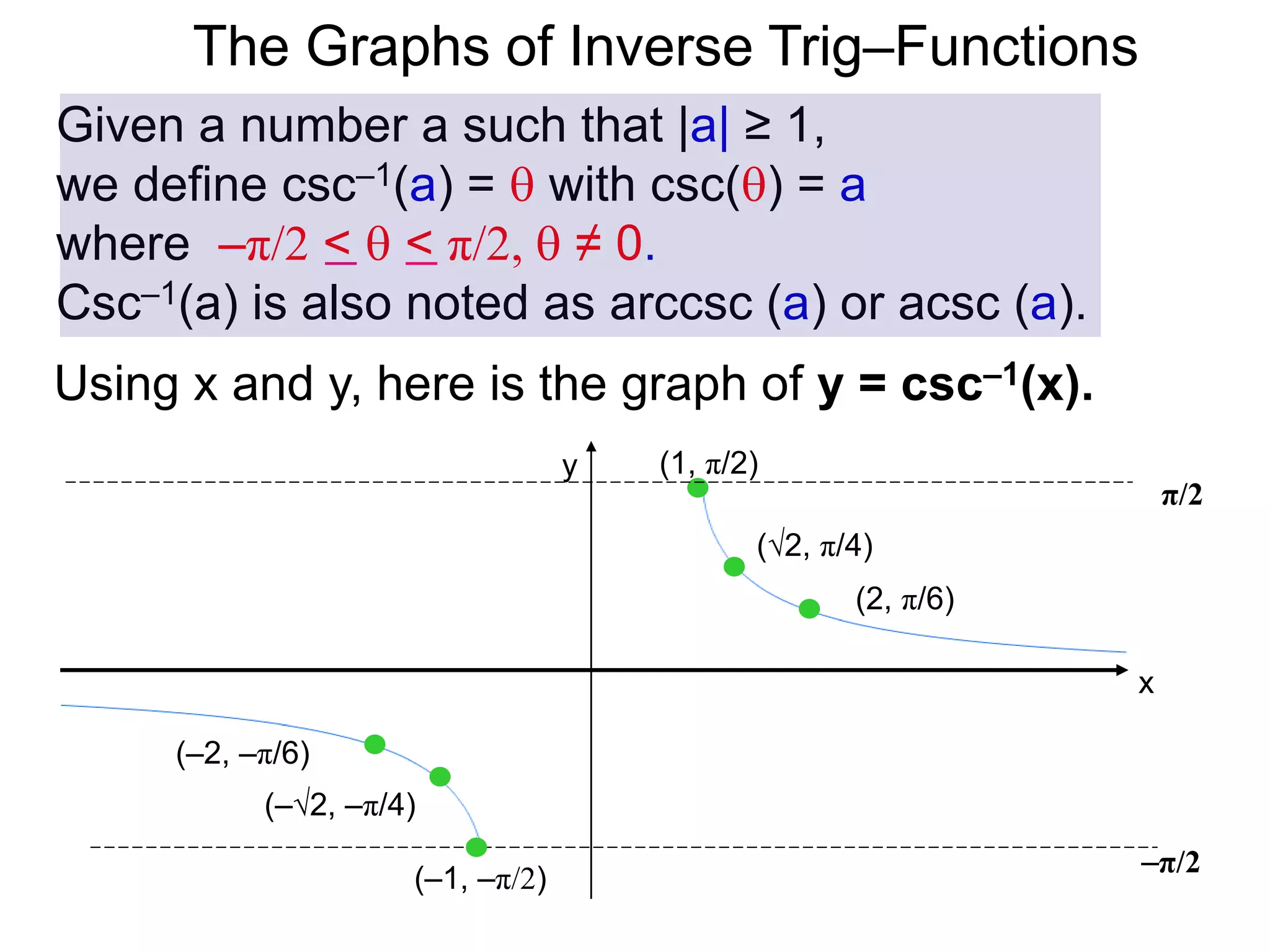
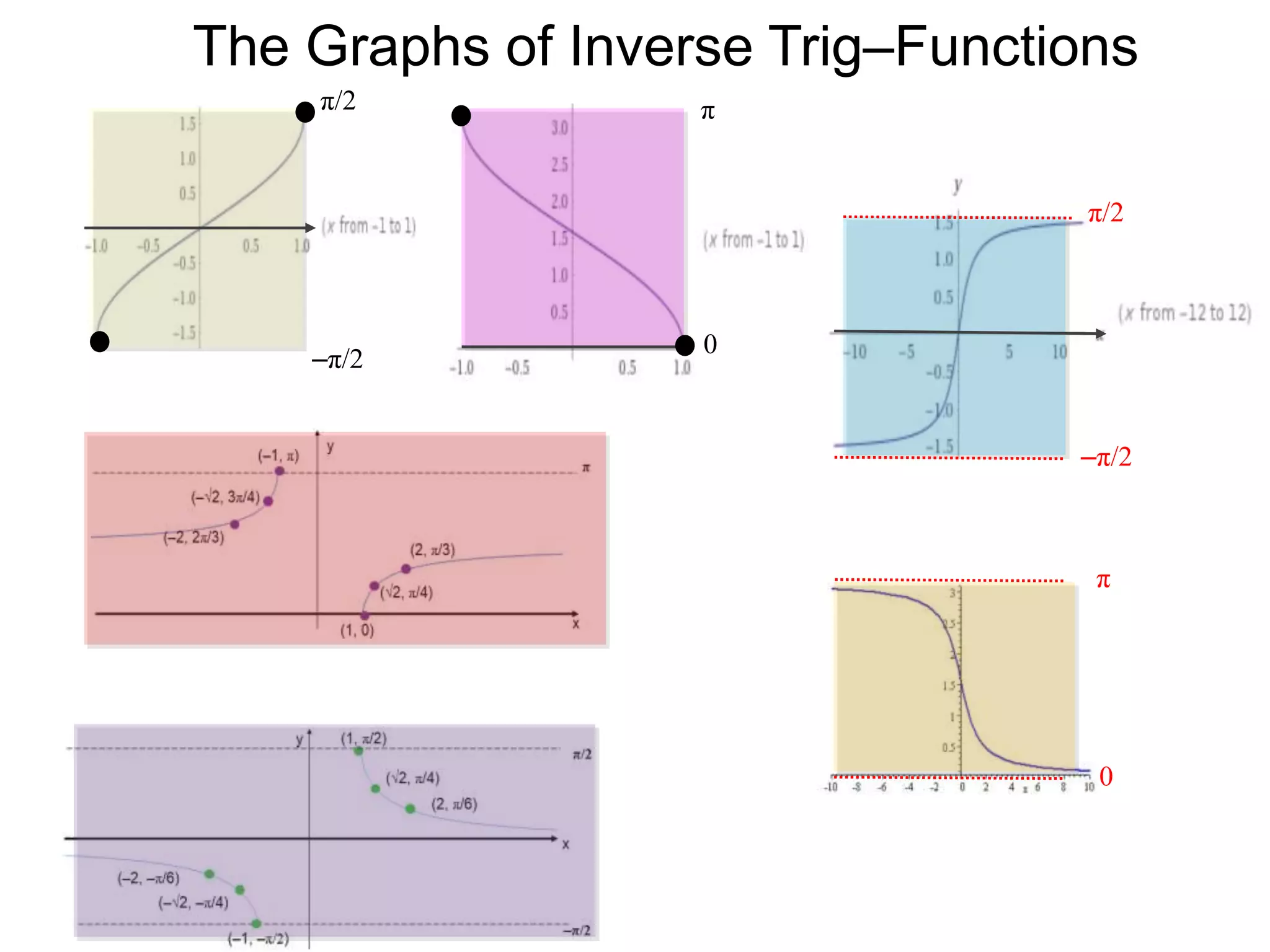
![and the sine–inverse
y = sin–1(x) : [–1, 1] [–π/2, π/2].
We will use the variable x and y for the functions
y = sin(x): [–π/2, π/2] [–1, 1].
The Graphs of Inverse Trig–Functions](https://image.slidesharecdn.com/7-190722034334/75/7-inverse-trig-functions-and-linear-trig-equations-x-74-2048.jpg)
![and the sine–inverse
y = sin–1(x) : [–1, 1] [–π/2, π/2].
We will use the variable x and y for the functions
y = sin(x): [–π/2, π/2] [–1, 1].
The Graphs of Inverse Trig–Functions
As in the case for all inverse pairs of functions,
the graph of y = sin–1(x) may be
obtained by reflecting
y = sin(x) across y = x.](https://image.slidesharecdn.com/7-190722034334/75/7-inverse-trig-functions-and-linear-trig-equations-x-75-2048.jpg)
![–1
y = sin–1(x)
y = x
y = sin(x)
and the sine–inverse
y = sin–1(x) : [–1, 1] [–π/2, π/2].
We will use the variable x and y for the functions
y = sin(x): [–π/2, π/2] [–1, 1].
The Graphs of Inverse Trig–Functions
As in the case for all inverse pairs of functions,
the graph of y = sin–1(x) may be
obtained by reflecting
y = sin(x) across y = x.
–π/2 π/2
1
–1](https://image.slidesharecdn.com/7-190722034334/75/7-inverse-trig-functions-and-linear-trig-equations-x-76-2048.jpg)
![–1
–π/2
y = sin–1(x)
1
–1
π/2
y = x
y = sin(x)
and the sine–inverse
y = sin–1(x) : [–1, 1] [–π/2, π/2].
We will use the variable x and y for the functions
y = sin(x): [–π/2, π/2] [–1, 1].
The Graphs of Inverse Trig–Functions
As in the case for all inverse pairs of functions,
the graph of y = sin–1(x) may be
obtained by reflecting
y = sin(x) across y = x.](https://image.slidesharecdn.com/7-190722034334/75/7-inverse-trig-functions-and-linear-trig-equations-x-77-2048.jpg)
![–1
–π/2
1
–1
–π/2
π/2
1–1 π/2
y = x
y = sin(x)
and the sine–inverse
y = sin–1(x) : [–1, 1] [–π/2, π/2].
We will use the variable x and y for the functions
y = sin(x): [–π/2, π/2] [–1, 1].
The Graphs of Inverse Trig–Functions
As in the case for all inverse pairs of functions,
the graph of y = sin–1(x) may be
obtained by reflecting
y = sin(x) across y = x.
y = sin–1(x)](https://image.slidesharecdn.com/7-190722034334/75/7-inverse-trig-functions-and-linear-trig-equations-x-78-2048.jpg)
![–1
–π/2
1
–1
–π/2
π/2
1–1 π/2
y = x
y = sin(x)
and the sine–inverse
y = sin–1(x) : [–1, 1] [–π/2, π/2].
We will use the variable x and y for the functions
y = sin(x): [–π/2, π/2] [–1, 1].
(π/6 ½)
The Graphs of Inverse Trig–Functions
As in the case for all inverse pairs of functions,
the graph of y = sin–1(x) may be
obtained by reflecting
y = sin(x) across y = x.
For example, the point
(π/6, ½) on y = sin(x)
y = sin–1(x)](https://image.slidesharecdn.com/7-190722034334/75/7-inverse-trig-functions-and-linear-trig-equations-x-79-2048.jpg)
![–1
–π/2
1
–1
–π/2
π/2
1–1 π/2
y = x
y = sin(x)
and the sine–inverse
y = sin–1(x) : [–1, 1] [–π/2, π/2].
We will use the variable x and y for the functions
y = sin(x): [–π/2, π/2] [–1, 1].
(½, π/6)
(π/6 ½)
The Graphs of Inverse Trig–Functions
As in the case for all inverse pairs of functions,
the graph of y = sin–1(x) may be
obtained by reflecting
y = sin(x) across y = x.
For example, the point
(π/6, ½) on y = sin(x)
corresponds to (½, π/6)
on y = sin–1(x) since
(, a) and (a, ) are the
reflection of each other.
y = sin–1(x)](https://image.slidesharecdn.com/7-190722034334/75/7-inverse-trig-functions-and-linear-trig-equations-x-80-2048.jpg)
![The graph of y = cos–1(x) is the reflection of the graph
of y = cos (x) where y = cos(x): [0, π] [–1, 1]
and y = cos–1(x): [–1, 1] [0, π]
The Graphs of Inverse Trig–Functions](https://image.slidesharecdn.com/7-190722034334/75/7-inverse-trig-functions-and-linear-trig-equations-x-81-2048.jpg)
![The Graphs of Inverse Trig–Functions
y = x
π
0
1
–1
π
y = cos(x)
y = cos–1(x)
The graph of y = cos–1(x) is the reflection of the graph
of y = cos (x) where y = cos(x): [0, π] [–1, 1]
and y = cos–1(x): [–1, 1] [0, π]](https://image.slidesharecdn.com/7-190722034334/75/7-inverse-trig-functions-and-linear-trig-equations-x-82-2048.jpg)
![The Graphs of Inverse Trig–Functions
y = x
π
0
1
–1
Here are some specific cosine inverse values:
π
(1, 0)
(–1, π)
(0, π/2)
cos–1(1) = 0,
cos–1(0) = π/2, and
cos–1(–1) = π.
y = cos(x)
y = cos–1(x)
The graph of y = cos–1(x) is the reflection of the graph
of y = cos (x) where y = cos(x): [0, π] [–1, 1]
and y = cos–1(x): [–1, 1] [0, π]](https://image.slidesharecdn.com/7-190722034334/75/7-inverse-trig-functions-and-linear-trig-equations-x-83-2048.jpg)
![The Graphs of Inverse Trig–Functions
y = cos(x)
y = x
π
0
1
–1
Here are some specific cosine inverse values:
π
(1, 0)
(–1, π)
(0, π/2)
cos–1(1) = 0,
cos–1(0) = π/2, and
cos–1(–1) = π.
P (0.74, 0.74) intersection point
P (0.74, 0.74)
in radian.
By solving cos(x) = x
numerically, we've the
.y = cos–1(x)
The graph of y = cos–1(x) is the reflection of the graph
of y = cos (x) where y = cos(x): [0, π] [–1, 1]
and y = cos–1(x): [–1, 1] [0, π]](https://image.slidesharecdn.com/7-190722034334/75/7-inverse-trig-functions-and-linear-trig-equations-x-84-2048.jpg)