Документ описывает электростатический мини-манипулятор, предназначенный для применения в электронике и микромеханике, который включает систему токопроводящих дорожек, диэлектрическое основание и подвижные электроды. Он разработан для улучшения функциональности электростатических микропереключателей, обеспечивая механизм, который возвращает подвижные элементы в исходное положение после отключения. Основные новшества заключаются в использовании упругих манипуляторов и специфических геометрических параметров элементов для повышения надежности и эффективности работы устройства.


![BY 6719 U 2010.10.30
2
( )
( )
,d2dd
;qt
L64
9
L
;
2
qt
H
;qt
4
3
A
213
2
1
2
+=
−
π
=∆
−
=
−=
где A - амплитуда свободно прогнутых по синусоиде манипуляторов при их осевом сжа-
тии,
при этом токопроводящие дорожки нанесены в углублении, выемках, на одной половине
верхней плоскости манипуляторов и зубцов, на всех сторонах пальцев, на всех поверхно-
стях одной горизонтальной стороны рамки и на трех внешних боковых ее сторонах, нор-
мально разомкнутые контакты управляемой цепи содержат перемычки на выступах якоря,
выполненных упругими и размещенных между держателями, и контакты на ступеньках в
углублении, расположенных под выступами, нормально разомкнутые контакты управля-
ющей цепи состоят из дорожки на боковой нижней стороне рамки и неподвижного элек-
трода, нормально замкнутые контакты управляющей цепи сформированы из дорожек на
зубцах и пальцах.
2. Электростатический мини-манипулятор по п. 1, отличающийся тем, что перифе-
рийные концы держателей соединены с гибкими упругими стенками, отделенными от
пластины сквозными пазами.
3. Электростатический мини-манипулятор по п. 1, отличающийся тем, что в плоско-
сти манипуляторов напротив щелей и зубцов размещены выступы с токопроводящей до-
рожкой на верхней стороне.
(56)
1. Патент США 160549.
2. Кухлинг Х. Справочник по физике. - М.: Мир, 1983. - С. 519.
3. Патент РБ 9096, MПK7
H 01H 59/00.
4. Писаренко Г.С., Агарев В.А., Квитко А.Л. и др. Сопротивление материалов. - Киев:
Вища школа, 1973. - 667 с.
5. Мухуров Н.И., Ефремов Г.И. Концепция построения электростатических микропе-
реключателей. XIV МНТК. - М.: ОАО ЦНИТИ, "Техномаш", 2008. - С. 212-215.
Полезная модель относится к электротехнике, микроэлектронике, микромеханике и
может быть использована в системах управления, коммутирования, связи, регулировки.
Известно MEMS micro-relay with coupled electrostatic and electromagnetic actuation
(микроэлектромеханическое реле с объединенным электростатическим и электромагнит-
ным приводом) [1]. Микрореле содержит диэлектрическую подложку прямоугольной
формы, в которой по продольной оси выполнена канавка с плоским дном. На ее боковых
сторонах размещены выступы. В канавке и на обоих выступах нанесен электропроводя-
щий слой, из которого посредством локального травления сформированы в средней части
подложки неподвижный электрод электростатического актюатора и в нем два раздельных
изолированных контакта управляемой цепи, а за его пределами - токопроводящие дорож-
ки. Над подложкой расположена диэлектрическая перфорированная пластина. В ее центре
размещен якорь, соединенный двумя симметричными меандрообразными упругими дер-
жателями с площадками на обоих концах пластины, которые жестко закреплены на кон-
цах выступов подложки. Конструкция пластины не обладает формоустойчивостью из-за
малой жесткости держателей. На пластине сформированы токопроводящие элементы: на](https://image.slidesharecdn.com/6719-151010202528-lva1-app6892/85/6719-2-320.jpg)
![BY 6719 U 2010.10.30
3
якоре снизу - подвижный электрод с пленочными выводами и изолированная от него пе-
ремычка управляемой цепи, размещенная в контуре электрода, сверху - токовая катушка.
С внешних боковых сторон напротив якоря расположены северный и южный полюса по-
стоянного магнита. Неподвижный и подвижный электроды образуют электростатический
привод (ЭСП), магнит с токовой катушкой - электромагнитный привод (ЭМП). В рабочем
цикле ЭМП предварительно приближает подвижный электрод к неподвижному, оконча-
тельное перемещение и замыкание контактов управляемой цепи перемычкой осуществля-
ет ЭСП. Такая последовательность несколько снижает требующееся напряжение U, но оно
остается высоким, т.к. электроды имеют малую площадь S из-за размещения на этих же
поверхностях подвижной перемычки, контактов и их выводов, а электростатическая сила
F [2] должна оставаться неизменной, чтобы преодолеть силу P сопротивления держателей,
деформируемых перемещающимся якорем:
( )
,P
yt2
SU
F 2
2
0 =
−
ε
= (1)
где ε0 - электрическая постоянная;
t - межэлектродное расстояние;
y - смещение якоря, прогиб держателей.
Возврат якоря в исходное положение осуществляется реактивными силами деформи-
рованных держателей, которые практически всегда в состоянии преодолеть реактивные
силы индуцированных зарядов, залипание контактов, инерционность масс, что в итоге на
неопределенное время задерживает отключение микрореле.
МЭМС микрореле с объединенными электромагнитным и электростатическим приво-
дами не может обеспечить надежность цикла срабатывания, т.е. имеет ограниченные
функциональные возможности.
Наиболее близким по технической сущности является электростатическое микрореле
[3], состоящее из диэлектрических прямоугольных основания, пластины и фиксатора, со-
единенных штырьками. На длинных сторонах основания выполнены попарно 4 опоры
одинаковой высоты, образуя углубление, равное расчетному межэлектродному расстоя-
нию t0. В пластине сформированы жесткий якорь и четыре жесткие опорные площадки,
соединенные с якорем упругими держателями, размещенными по боковым сторонам яко-
ря вдоль оси пластины. Опорные площадки расположены соответственно опорам на осно-
вании. Держатели от всех опорных площадок направлены в одну сторону, чтобы избежать
их растяжения и снизить реактивную силу. Над пластиной расположен фиксатор, на его
внутренней стороне выполнены упоры высотой (0,55-0,80)t0 с металлизированными тор-
цами. На верхней плоскости пластины под упорами сформированы контактные площадки.
На внутренней поверхности якоря и в углублении размещены соответственно подвижный
и неподвижный электроды, образующие электростатический актюатор. На этих же по-
верхностях расположены контакты и перемычки. В собранном микрореле якорь упорами
фиксатора смещен до межэлектродного расстояния t = (0,45-0,20)t0, контакты на якоре и
перемычки образуют нормально разомкнутые (HP) контакты, а металлизация торцов и
контактные площадки - нормально замкнутые (HЗ) контакты управляемой цепи, причем
контактное усилие Pк в последних равно реактивной силе P1 механически прогнутых дер-
жателей.
Микрореле срабатывает при подаче на электроды разноименных зарядов по управля-
ющей цепи. Под действием электростатических сил F (1) якорь перемещается в конечное
положение, дополнительно прогибая держатели и увеличивая их реактивную силу P2, а
также размыкая HЗ- и замыкая HP-контакты в управляемой цепи.
Для последовательного преодоления сил P1, P2 при включении требуется значительное
рабочее напряжение U (1), которое инициирует возникновение паразитных емкостей с ре-
активными силами Fп. При отключении сила держателей P становится активной. Она](https://image.slidesharecdn.com/6719-151010202528-lva1-app6892/85/6719-3-320.jpg)

![BY 6719 U 2010.10.30
5
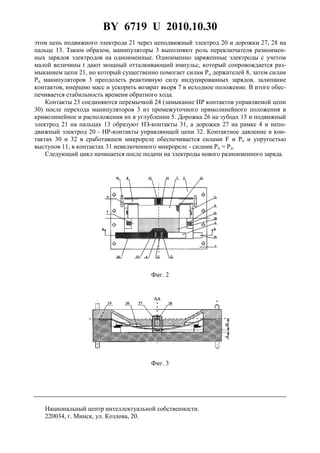
Электростатический манипулятор содержит прямоугольные диэлектрические основа-
ние 1, пластину 2, два плоских манипулятора 3, две рамки 4.
В центральной части верхней поверхности основания 1 выполнено (фиг. 1-2) прямо-
угольное углубление 5 глубиной t1, в котором на противолежащих коротких сторонах
предусмотрены ступеньки 6. Над основанием 1 расположена жесткая пластина 2 толщи-
ной d1, выполненная в виде четырехсторонней рамки. В ее средней части сформирован
жесткий якорь 7 толщиной d1 с четырьмя упругими держателями 8, расположенными
вдоль двух боковых сторон якоря 7 и направленными попарно к коротким сторонам пла-
стины 2. Концы держателей 8 соединены с тонкими стенками 9, выполняющими роль тор-
сионов. Стенки 9 отделены от коротких сторон пластины 2 сквозными пазами 10. Между
держателями 8 на обеих сторонах якоря 7 на его нижней плоскости сформированы упру-
гие выступы 11, ширина которых определяет длину ступенек 6. В середине боковых сто-
рон якоря 7 с держателями 8 выполнены по две поперечные щели 12, образующие пальцы
13. Манипуляторы 3 длиной L1 расположены под держателями 8. Под концами манипуля-
торов 3 в основании 1 сформированы выемки 14 глубиной, равной толщине d2 манипуля-
торов 3, одинаковой с ними ширины и с расстоянием L2 между торцевыми стенками
противоположных выемок 14, меньшим длины манипуляторов L1 на
∆L = L1 - L2 > 0. (2)
В середине манипуляторов 3 расположены зубец 15, аналогичный пальцу 13, и попе-
речные щели 12. С другой стороны в плоскости манипулятора 3 размещены полочки 16,
обеспечивающие постоянную жесткость поперечных сечений по длине. Рамки 4 с толщи-
ной стенок d надеты на пальцы 13 и зубцы 15 и соединяют якорь 7 и манипуляторы 3. В
них выполнены окна 17 шириной, равной ширине пальцев 13, и высотой d3, равной сумме
d3 = d1+d2+s=d1+2d2, (3)
где зазор s = d2 обеспечивает возможность перемещения зубца 15 манипулятора 3 в окне
17. По периферии основания 1 и пластины 2 расположены сквозные соосные отверстия 18,
в которые установлены центрирующие и коммутирующие штырьки 19. На противолежа-
щих плоскостях основания 1 и якоря 7 с выступами 11, а также на всей боковой поверхно-
сти пальцев 13 сформированы неподвижный 20 и подвижный 21 электроды, образующие
электростатический актюатор 22, входящий в управляющую цепь. На ступеньках 6 и вы-
ступах 11 расположены соответственно неподвижные контакты 23 и подвижные пере-
мычки 24. Коммутирующие дорожки размещены: 25 - на поверхности углубления 5, 26 -
на концах и половине одной из верхних сторон манипулятора 3 и на той же стороне зуб-
цов 15, располагаемых при металлизации в противоположные стороны, 27 - на внешних
боковых сторонах рамок 4, 28 - на всех сторонах верхней горизонтали рамок 4, 29 - на дне
выемок 14. Контакты 23 и перемычки 24 образуют HP-контакты управляемой цепи 30, до-
рожка 26 и подвижный электрод 21 формируют HЗ-контакт управляющей цепи 31, а не-
подвижный электрод 20 и дорожка 27 - HP-контакт управляющей цепи 32.
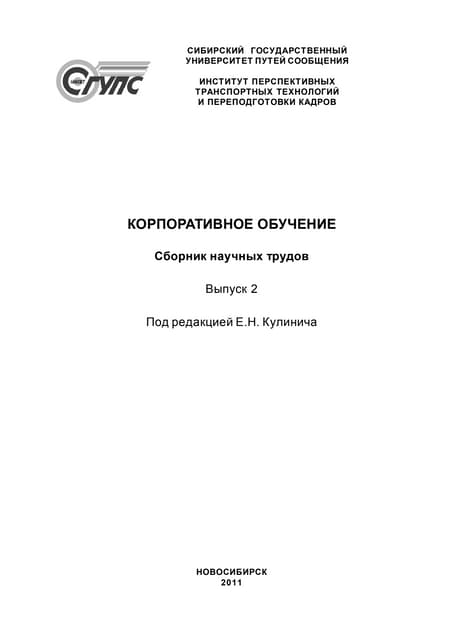
При сборке пластина 2 располагается подвижным электродом 21 вниз. Под ее боковые
стороны устанавливаются манипуляторы 3 дорожкой 26 вверх и влево. На совмещенные
пальцы 13 и зубцы 15 надеваются рамки 4 дорожкой 28 вверх. Затем металлизированные
концы манипуляторов 3 помещаются в выемки 14 до упора в их торцы. Манипуляторы 3
оказываются в изогнутом состоянии, т.к. L1 > L2. Разница определяется соотношением
,
L4
A
L
2
22
π
=∆ (4)
где A (согласно теории устойчивости [4]) - амплитуда изогнутой по синусоиде оси пружи-
ны. Она является функцией задаваемого техническими требованиями (TT) межэлектрод-
ного расстояния t. При установке пластины 2 на основание 1 якорь 7 нажимает на
манипуляторы 3, деформирует их, уменьшая амплитуду A до H (фиг. 1). Под действием
реактивной силы Pп манипуляторов 3 держатели 8 прогибаются наружу, в них возникает](https://image.slidesharecdn.com/6719-151010202528-lva1-app6892/85/6719-5-320.jpg)
![BY 6719 U 2010.10.30
6
сила Pд = Pп, величину которой значительно снижают упругие стенки 9 за счет уменьше-
ния сил растяжения держателей 8 и реактивных моментов в заделке. Нужное соотношение
сил и прогиба H достигается расчетами по теории упругости [4] жесткостей манипулято-
ров 3 и держателей 8. Силы Pп = Рд создают нужное по TT контактное усилие Pк в HЗ-
контактах управляющей цепи 31. По расчетам электростатических F и упругих механиче-
ских сил P оптимальное значение для компромисса электрических и механических напря-
жений с учетом явления коллапса [5] достигается при
A
3
2
H ≈ (5)
в собранной конструкции ЭСМ. Геометрические параметры при заданных t, L2 и d опре-
деляются следующими (из 2-5) соотношениями. Так как (фиг. 1-3)
t = 2H+d, (6)
то
( );
4
dt3
A
−
= (7)
;
2
dt
H
−
= (8)
( ) ;dt
L64
9
L
2
2
2
−
π
=∆ (9)
d3 = d1 + 2d2. (10)
На этой стадии пластина 2 прижата к основанию 1, жестко зажимает металлизирован-
ные концы манипуляторов 3 и закреплена на штырьках 19.
Электрическая цепь неподвижного электрода 20 (фиг. 1) замкнута с одним из штырь-
ков 19 дорожкой 25, проходящей по основанию 1. Электрическая цепь подвижного элек-
трода 21 соединена с другим штырьком дорожкой 29, проходящей по выемке 14,
дорожкой 26 - на манипуляторе 3 и зубце 15, дорожкой 27 - на пальце 13. HP-контакты
управляемой цепи остаются открытыми.
Диэлектрические детали ЭСМ могут быть изготовлены из анодного оксида алюминия,
который обладает высокими электрофизическими и механическими свойствами. Алюмо-
оксидная технология, основанная на интегральных методах формирования, обеспечивает
прецизионность геометрии планарных и объемных структур. Токопроводящие тонкопле-
ночные элементы создаются вакуумным напылением.
ЭСМ работает следующим образом.
При подаче по управляющей цепи разноименных зарядов между неподвижным 20 и
подвижным 21 электродами возникнут согласно (1) электрические силы F притяжения.
Под действием их и сил Рд деформированных держателей 8 якорь 7 начнет перемещаться
в сторону основания 1, продолжая деформировать, т.е. выпрямлять, манипуляторы 3, при
этом активные силы F возрастают, Pд уменьшаются, реактивная сила Pп возрастает, кон-
тактное усилие Рк обеспечивается сжатием пальцев 13 и зубцов 15. При достижении плос-
кой формы манипуляторов 3 и пластины 2 усилие Рк сохраняется за счет действия сил F и
Pп и цепь подвижного электрода 21 остается замкнутой. Однако такое положение мгно-
венно изменяется. Силы F, Pп и инерционные Ри прогибают манипуляторы 3 и держатели
8 в другую сторону, к основанию 1. Функции сил изменяются: активными становятся F и
P, реактивными - Рд, причем F и Pд возрастают, a Pп уменьшается.
Манипуляторы 3, переместившись в окне 17, разомкнут цепь подвижного электрода
21, упрутся в нижнюю изолированную сторону рамки 4 и потянут за собой через рамку 4
якорь 7 до тех пор, пока рамка 4 не достигнет неподвижного электрода 20, замкнув при](https://image.slidesharecdn.com/6719-151010202528-lva1-app6892/85/6719-6-320.jpg)