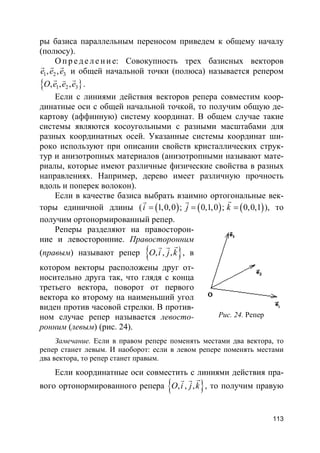
Документ является практикумом по высшей математике, предназначенным для студентов технических специальностей, и охватывает использование математического моделирования в инженерной деятельности. Он акцентирует внимание на важных аспектах формирования знаний и навыков решения математических задач, а также на применении вычислительных методов. Сборник содержит математические и прикладные задачи, предназначенные для улучшения понимания математических моделей и их практического использования.
![7
Цель расчетов – понимание, а не числа.
Р.В. Хемминг [8]
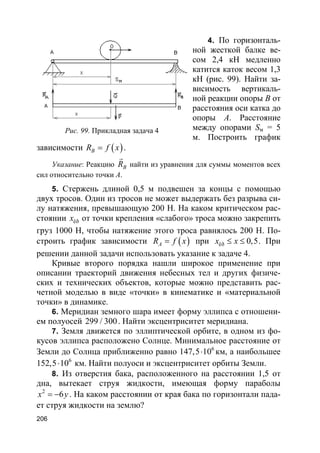
Тема 0: ВВЕДЕНИЕ В КУРС ВЫСШЕЙ МАТЕМАТИКИ
0.10
. Исходные положения теории множеств
Современная математика строится и изучается на основе тео-
рии множеств. Множество относится к первичным (исходным)
математическим понятиям, которые формально не определяются.
Под множеством подразумевают любую совокупность некоторых
математических объектов, объединенных по определенному при-
знаку.
Пр и м е р ы: множество четных чисел, меньших 100; множе-
ство сторон многоугольника; множество точек на отрезке прямой
и т.п.
В прикладных задачах синонимами понятия «множество» яв-
ляются «совокупность», «собрание», «группа», «семейство» и т.д.
Объекты, из которых состоит множество, называют элемен-
тами и подмножествами. Элемент множества рассматривается
как единое целое, неразложимое на более простые части. Под-
множество – часть множества, включающая в себя некоторые
(или все) элементы множества (подмножество может не включать
в себя ни одного элемента множества, в этом случае оно называ-
ется пустым множеством и обозначается ∅).
Пр и м е р. Множество натуральных чисел N: 1, 2, 3, ... . Его
подмножествами являются, например, множество четных чисел;
множество чисел, не превосходящих 1000; множество, состоящее
из одного числа }{1 , и т.п.
Множества и подмножества обычно обозначаются заглавны-
ми (обычно латинскими) буквами (иногда с индексами)
, , ,..., , ,A B C X Y Z или 1 2 3, , , ...,A A A а их элементы — малыми
буквами , , ,...a b c или 1 2 3, , ,...a a a .
Для обозначения отношений между множествами и элемен-
тами используют следующие условные знаки:
B A⊆ множество B является подмножеством множества A (в
частности, эти множества могут совпадать);
B A⊂ множество B является подмножеством множества A и
при этом B не совпадает с A;](https://image.slidesharecdn.com/ovi4tagwqsagbe0to8xy-signature-2dfd883d34a9150c84f328602acf26f21197bd60f9f2637420b7ac825ad7b362-poli-160712065932/85/585-5-320.jpg)

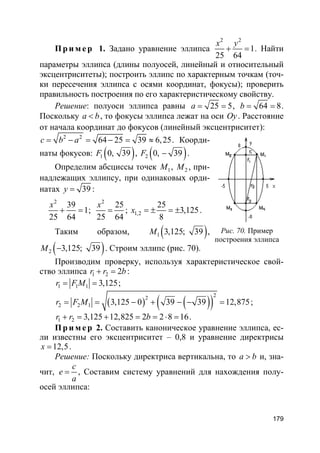
![11
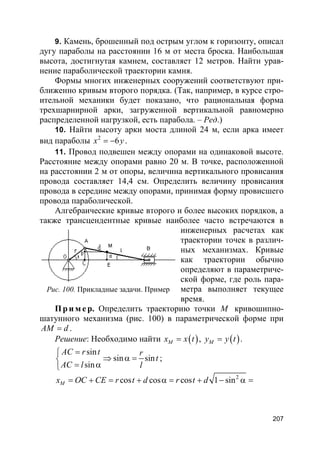
г) множество чисел отрезков [ ]0;1 и [ ]2; 10 ;
д) множество действительных чисел и интервал ;
2 2
π π
−
.
0.1.3. Даны множества }{1; 2; 3; 4A = и }{3; 4; 5B = .
а) Перечислить все элементы множеств , , ,A B A B A B∪ ∩
B A;
б) Перечислить все элементы множеств , ,A B B A A A× × × .
0.1.4. Даны множества }{ ;A a b= и }{ ; ; &B = × ∗ .
а) Перечислить все элементы множеств , ,A B B A A A× × × ;
б) Перечислить все элементы множеств A A A× × , A B A× × .
0.1.5. Сколько различных подмножеств содержит множество
а) состоящее из четырех элементов;
б) состоящее из пяти элементов;
в) состоящее из шести элементов.
Догадайтесь, сколько различных подмножеств содержит
множество, состоящее из n элементов.
0.1.6. Для множеств A и B найти , , , A B A B A B B A∪ ∩
а) [ ] [ ]1; 3 , 2; 5A B= = ; б) ( ) ( )1; 3 , 2; 5A B= = ;
в) [ ) ( ]1; 3 , 2; 5A B= = ; г) [ ] ( )1; 3 , 2; 5A B= = .
0.1.7. Для множеств A и B найти , , , A B A B A B B A∪ ∩ ,
если [ ] }{1; 3 , 1; 2; 3A B= = .
0.1.8. С помощью кругов Эйлера доказать тождества
а) ( ) ( ) ( )A B C A B A C∪ ∩ = ∪ ∩ ∪ ;
б) ( ) ( ) ( )A B C A B A C∩ ∪ = ∩ ∪ ∩ ;
в) ( ) ( ) ( ) A B C A B A C∪ = ∩ .
0.20
. Числовые множества
действительной переменной
Натуральными числами называются числа 1, 2, 3, 4, и т.д.
Множество натуральных чисел обозначается N и является исход-
ным числовым множеством.
О п р е д е ле н и е: Множеством целых чисел называется мно-
жество }{ }{| , 0Z k k n n N= = ± ∈ ∪ .](https://image.slidesharecdn.com/ovi4tagwqsagbe0to8xy-signature-2dfd883d34a9150c84f328602acf26f21197bd60f9f2637420b7ac825ad7b362-poli-160712065932/85/585-9-320.jpg)


![18
5. Точечные множества и координатные пространства, гео-
метрическая интерпретация действительных чисел.
6. Прямоугольные системы координат (определения, рассто-
яния между точками в координатных пространствах), взаимно
однозначное соответствие между точками и постоянными (пере-
менными) математическими величинами.
Студент должен уметь:
1. Задавать конечные и бесконечные множества.
2. Устанавливать взаимно однозначное соответствие между
множествами и интерпретировать математические и физические
величины как элементы множеств.
3. Выполнять арифметические операции с модулями дей-
ствительных чисел.
4. Определять положение точек и расстояние между точками
в одномерных, двумерных и трехмерных системах координат.
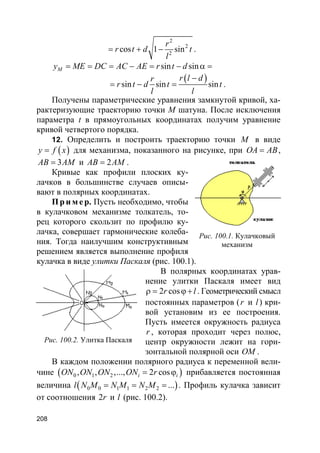
Ответы к задачам темы
«Введение в курс высшей математики»
0.1.1. а) Множество A состоит из двух элементов, каждое из которых
является множеством, множество B – из четырех элементов, каждое из ко-
торых является числом; б) Множество A состоит из двух элементов, мно-
жество B – из четырех элементов; в) Хотя множества и состоят из одина-
кового количества элементов, но элементами множества A являются мно-
жество и число, а элементами множества B – два множества.
0.1.2. а) Сопоставим элементу 1 A∈ элемент a∈B, элементу 2 A∈
элемент b∈ B, элементу 3 A∈ элемент c∈ B, элементу 4 A∈ элемент
d ∈B; получим взаимно однозначное соответствие; б) Сопоставим каждой
из 33 букв русского алфавита ее номер в алфавите; в) взаимно однозначное
соответствие можно задать, например, формулой f (n) = 2n, т.е. каждому
натуральному числу поставить в соответствие число, в два раза большее;
г) взаимно однозначное соответствие можно задать, например, формулой
f(x) = 8x + 2. Читателю рекомендуется построить прямую y = 8x + 2 в си-
стеме координат на отрезке x ∈ [0; 1]; д) взаимно однозначное соответ-
ствие можно задать, например, формулой f(x) = tg x.
0.1.3. а) { }1; 2; 3; 4; 5A B∪ = ; { }3; 4A B∩ = ; { } 1; 2A B = ; { } 5B A = ;
б) A × B = {(1; 3); (1; 4); (1; 5); (2; 3); (2; 4); (2; 5); (3; 3); (3; 4); (3; 5); (4; 3);
(4; 4); (4; 5)}; B × A = {(3; 1); (3; 2); (3; 3); (3; 4); (4; 1); (4; 2); (4; 3); (4; 4);
(5; 1); (5; 2); (5; 3); (5; 4)}; A × A = {(1; 1); (1; 2); (1; 3); (1; 4); (2; 1); (2; 2);
(2; 3); (2; 4); (3; 1); (3; 2); (3; 3); (3; 4); (4; 1); (4; 2); (4; 3); (4; 4)}.
0.1.4. а) A × B = {(a; ×); (a; *); (a; &); (b; ×); (b; *); (b; &)}; B × A =
= {(×; a); (×; b); (*; a); (*; b); (&; a); (&; b)}; A × A = {(a; a); (a; b); (b; a);](https://image.slidesharecdn.com/ovi4tagwqsagbe0to8xy-signature-2dfd883d34a9150c84f328602acf26f21197bd60f9f2637420b7ac825ad7b362-poli-160712065932/85/585-16-320.jpg)
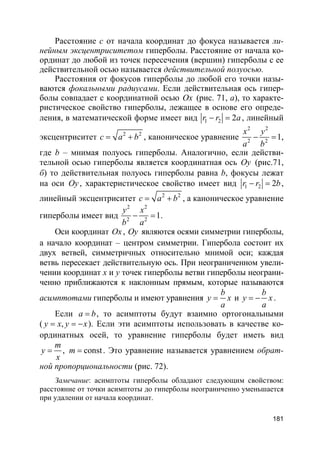
![19
(b; b)}; б) A × A × A ={(a; a; a); (a; a; b); (a; b; a); (a; b; b); (b; a; a);
(b; a; b); (b; b; a); (b; b; b)}; A × B × A = {(a; ×; a); (a; ×; b); (a; *; a); (a; *; b);
(a; &; a); (a; &; b); (b; ×; a); (b; ×; b); (b; *; a); (b; *; b); (a; &; a); (a; &; b)}.
0.1.5. а) 16; б) 32; в) 64; г) 2n
.
0.1.6. а) A ∪ B = [1; 5]; A ∩ B = [2; 3]; A B = [1; 2); B A = (3; 5];
б) A ∪ B = (1; 5); A ∩ B = (2; 3); A B = [2; 3); B A = [3; 5);
в) A ∪ B = [1; 5]; A ∩ B = (2; 3); A B = [1; 2]; B A = [3; 5];
г) A ∪ B = [1; 5); A ∩ B = (2; 3]; A B = [2; 3]; B A = (3; 5).
0.1.7. A ∪ B = A = [1; 3]; A ∩ B = B = {1; 2; 3}; A B = (1; 2) ∪ (2; 3);
B A = ∅.
0.2.1. а)
25 26 27
26 27 28
< < ; б)
29
2,23 5
13
< < ; в)
3927
3,14159
1250
< π < ;
г) sin 43 0,69 lg5< <o
.
0.2.2. а) 1 21; 5x x= − = ; б) 1 23; 11x x= = ; в) 1 2
7
; 3
3
x x= = .
0.2.3. а) 1 2
16 16
;
5 3
x x= = ; б)
3
4
x = .
0.2.4. а) 1 1x = − ; б) [ )2;x∈ ∞ ;
0.2.5. а) ( )1; 5x∈ − ; б) [ ]1; 7x∈ ; в) ( ) ( ); 1 13;x∈ −∞ − ∪ ∞ .
0.2.6. а) от 19,2252 до 19,7752; б) 0,91 0,05;∆ = δ = .
0.2.7. 4,8∆ = ; 0,08δ = .
0.2.8. а) 0,02δ = ; б) 0,002δ = .
0.2.9. Объем цилиндра вычисляется по формуле V = πR2
h, значит, если
радиус и высота измерены с погрешностями ,R hδ δ , то V = π(R + δR)2
×
× (h + δh) = πR2
h + π∆, где ∆ = 2Rhδh + 2
Rhδ + 2RδRδh +
2
R hδ δ ,
2 2
2
2 2h R R h R hRh h R
R h
δ + δ + δ δ + δ δ
δ = .
0.2.10. а) По второму закону Ньютона: F ma= . Значит,
( ) ( )m a a m m mm a ma m a∆ = + δ ⋅ + δ − = δ + δ + δ δ , a m m mm a
ma
δ + δ + δ δ
δ = ;
б) По закону Ома U IR= , где U — напряжение, I — сила тока, R —
сопротивление; ( ) ( )I R R I R II R IR I R∆ = + δ ⋅ + δ − = δ + δ + δ δ ,
R I R II R
IR
δ + δ + δ δ
δ = .
0.3.1. Пусть дан отрезок AB в пространстве. Опустим из точек A и B
перпендикуляры на плоскость xOy, основания перпендикуляров обозначим
соответственно C и D (рис. 3). Прямые AC и CD перпендикулярны, так как
прямая AC перпендикулярна любой прямой, лежащей в плоскости xOy. По
той же причине перпендикулярны прямые BD и CD. Следовательно, четы-](https://image.slidesharecdn.com/ovi4tagwqsagbe0to8xy-signature-2dfd883d34a9150c84f328602acf26f21197bd60f9f2637420b7ac825ad7b362-poli-160712065932/85/585-17-320.jpg)





![28
1
cos
2
−
ϕ = ,
3
sin
2
−
ϕ = и
4 4
2 cos sin
3 3
z i
π π
= +
. Если считать,
что 0 arg 2z≤ < π, то задача решена. Если же arg z−π < ≤ π, то
угол
4
3
π
не является главным значением аргумента. В этом слу-
чае (см. рис. 8)
2 2
2 cos sin
3 3
z i
− π π
= + −
.
Таким образом, сопряженные комплексные числа в тригоно-
метрической форме имеют одинаковые модули, а их аргументы
различаются только знаками.
Если главные значения аргумента не соответствуют углам,
для которых числовые значения тригонометрических функций
известны из школьной математики, то используют тригономет-
рические таблицы или выражают аргумент через обратные три-
гонометрические функции (arcsin,arccos,arctg).
Пр и м е р 2. Представить комплексное число 5 12z i= − + в
тригонометрической форме, используя главное значение аргу-
мента. Изобразить комплексное число на комплексной плоскости.
Решение: ( )2 2
5 12 13z = − + = . Поскольку
5
cos
13
−
ϕ = ,
12
sin
13
ϕ = , то радиус-вектор числа расположен во втором квад-
ранте. Арксинус использовать напрямую нельзя, так как по опре-
делению arcsin ;
2 2
x
π π
∈ −
. Поскольку [ ]arccos 0;x∈ π , то
5
arccos 0,64
12
ϕ = − ≈ π
.
( )13 cos0,64 sin0,64z i≈ π + π .
1.2.10
. Умножение и деление комплексных чисел
в тригонометрической форме. Возведение в целую степень
Складывать и вычитать комплексные числа удобнее в алгеб-
раической форме, умножать и делить – в тригонометрической.
Пусть 1 1 1(cos sin )1z i= ρ ϕ + ϕ , 2 2 2(cos sin )2z i= ρ ϕ + ϕ , тогда
1 2 1 1 2 2(cos sin )(cos sin )1 2z z i i⋅ = ρ ρ ϕ + ϕ ϕ + ϕ =](https://image.slidesharecdn.com/ovi4tagwqsagbe0to8xy-signature-2dfd883d34a9150c84f328602acf26f21197bd60f9f2637420b7ac825ad7b362-poli-160712065932/85/585-26-320.jpg)







































































































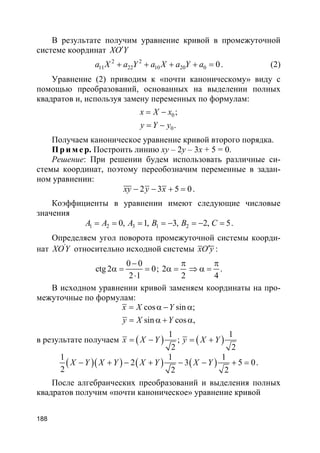
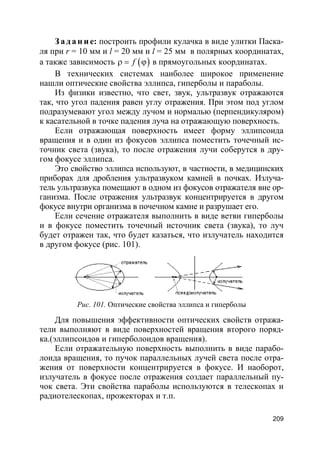
![191
При ϕ = 0 ρ = 4a. На промежутке 0;
2
π
функция y = cos ϕ убывает, значит, и коор-
дината ρ будет уменьшаться и при
2
π
ϕ =
ρ = 2a. Функция y = cos ϕ продолжает убы-
вать на промежутке ;
2
π
π
и при ϕ = π ρ = 0.
На промежутке [ ]; 2π π функция
y = cos ϕ возрастает, значит, ρ также
возрастает.
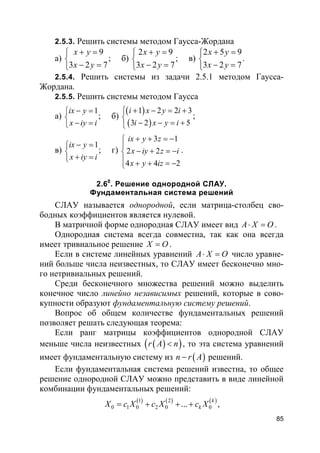
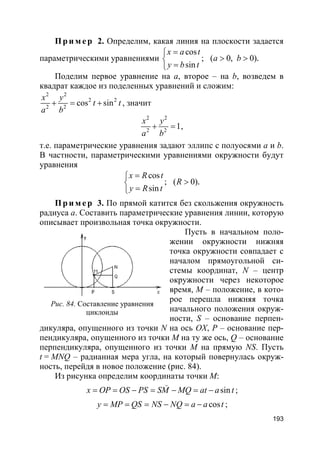
Рассмотрим прямоугольную си-
стему координат на плоскости и по-
местим на этой же плоскости поляр-
ную систему координат так, чтобы
полюс совпал с началом прямоуголь-
ной системы координат, а направле-
ние полярной оси – с положительным направлением оси OX
(рис. 83). Тогда из прямоугольного треугольника получим:
cos
sin .
,x
y
= ρ ϕ
= ρ ϕ
Это формулы перехода от прямоугольной системы координат
к полярной. Из того же прямоугольного треугольника можно по-
лучить формулы перехода от полярной системы координат к
прямоугольной:
2 2
2 2
2 2
cos
sin
x y
x
x y
y
x y
ρ = +
ϕ =
+
ϕ =
+
Рис. 82. Кардиоида
Рис. 83. Связь прямоугольной
и полярной систем координат](https://image.slidesharecdn.com/ovi4tagwqsagbe0to8xy-signature-2dfd883d34a9150c84f328602acf26f21197bd60f9f2637420b7ac825ad7b362-poli-160712065932/85/585-189-320.jpg)






![205
4.6.11. Изобразить тело, ограниченное плоскостями:
а) 0x = , 0y = , 0z = , 2 3 5 30 0x y z+ − − = ;
б) 0z = , y x= , 2y x= , 1x y z+ + = ;
в) 2 5 7x y z+ + = , 1y = , 1x = , 0x = , 0y = , 0z = ;
г) 3 6 0x y+ − = , 3 2 12x y+ = , x y= , 3z = , 0x = , 0z = ;
д) 5 4 5 20x y z+ + = , 2z = , 2,4x = , 0x = , 0y = , 0z = ;
е) 3 2 3 12x y z+ + = , 3 6x y+ = , 0x y− = , 0y = , 0z = .
4.6.12. Изобразить тело, ограниченное поверхностями:
а)
2
2
4
y
z x= + , 1z = ; б) y x= , 6x z+ = , 2y x= , 0z = ;
в) 2
3y x= , 1x y+ = , 0y = , 3z = ; г) 2 2
1x y+ = , 2
y z= , 0z = ;
д) 2 2
x y z+ = , 2
y x≥ , 2z = ; е) 2 2 2
9x y z+ + = , 3 2 6x z+ ≤ ,
0z ≥ .
4.110
. Прикладные задачи
по теме «Аналитическая геометрия
Технические системы в первом приближении в большинстве
случаев рассматриваются как линейные системы и описываются с
помощью линейных зависимостей, графики которых являются
прямыми и плоскостями.
Для освоения основ использования аналитической геометрии
для решения физических и технических задач рекомендуется рас-
смотреть нижеследующие прикладные задачи для прямых и ли-
нейных зависимостей, графиками которых являются прямые.
1. Материальная точка в течение 30 с двигалась равномерно
со скоростью 0 20v = м/с, а затем равноускоренно с ускорением
2a = м/с2
. Построить график зависимости ( )v f t= при [ ]0; 50t ∈ .
2. Начальная скорость точки равна 10 м/с. Точка движется
прямолинейно, равнозамедленно и останавливается через 100 с.
Найти линейную зависимость скорости точки от времени. Опре-
делить скорость точки через 20 с после начала движения.
3. Луч света направлен по прямой
2
4
3
y x= − . Дойдя до плос-
кости, на которой лежит ось абсцисс, луч отражается. Найти точ-
ку встречи луча с плоскостью и уравнение отраженного луча.
Пояснения: Угол падения равен углу отражения. Прямой и от-
раженный лучи вместе с осью абсцисс лежат в одной плоскости.](https://image.slidesharecdn.com/ovi4tagwqsagbe0to8xy-signature-2dfd883d34a9150c84f328602acf26f21197bd60f9f2637420b7ac825ad7b362-poli-160712065932/85/585-203-320.jpg)