Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
The Whole Brain Architecture Initiative
PPTX, PDF
285 views
第3回WBAハッカソン第2回説明会資料(配布用)
2017年9月にWBAIが開催するハッカソンの説明資料
Technology
◦
Read more
1
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 55
2
/ 55
3
/ 55
4
/ 55
5
/ 55
6
/ 55
7
/ 55
8
/ 55
9
/ 55
10
/ 55
11
/ 55
12
/ 55
13
/ 55
14
/ 55
15
/ 55
16
/ 55
17
/ 55
18
/ 55
19
/ 55
20
/ 55
21
/ 55
22
/ 55
23
/ 55
24
/ 55
25
/ 55
26
/ 55
27
/ 55
28
/ 55
29
/ 55
30
/ 55
31
/ 55
32
/ 55
33
/ 55
34
/ 55
35
/ 55
36
/ 55
37
/ 55
38
/ 55
39
/ 55
40
/ 55
41
/ 55
42
/ 55
43
/ 55
44
/ 55
45
/ 55
46
/ 55
47
/ 55
48
/ 55
49
/ 55
50
/ 55
51
/ 55
52
/ 55
53
/ 55
54
/ 55
55
/ 55
More Related Content
PDF
全脳アーキテクチャ勉強会 第2回 (山川)
by
ドワンゴ 人工知能研究所
PDF
全脳アーキテクチャ勉強会 第4回(山川)
by
ドワンゴ 人工知能研究所
PPTX
自然な知覚を支える脳情報表現の定量理解
by
shinjinishimoto
PPTX
汎用人工知能の研究動向
by
Naoya Arakawa
PDF
全脳アーキテクチャ勉強会 第1回(山川)
by
ドワンゴ 人工知能研究所
PDF
次世代脳シンポジウム(2016年12月19日)
by
ドワンゴ 人工知能研究所
PDF
全脳アーキテクチャ実現への長き道のりをいかに支えるのか
by
ドワンゴ 人工知能研究所
PDF
第9回全脳アーキテクチャ勉強会:「実世界に接地する言語と記号」
by
ドワンゴ 人工知能研究所
全脳アーキテクチャ勉強会 第2回 (山川)
by
ドワンゴ 人工知能研究所
全脳アーキテクチャ勉強会 第4回(山川)
by
ドワンゴ 人工知能研究所
自然な知覚を支える脳情報表現の定量理解
by
shinjinishimoto
汎用人工知能の研究動向
by
Naoya Arakawa
全脳アーキテクチャ勉強会 第1回(山川)
by
ドワンゴ 人工知能研究所
次世代脳シンポジウム(2016年12月19日)
by
ドワンゴ 人工知能研究所
全脳アーキテクチャ実現への長き道のりをいかに支えるのか
by
ドワンゴ 人工知能研究所
第9回全脳アーキテクチャ勉強会:「実世界に接地する言語と記号」
by
ドワンゴ 人工知能研究所
What's hot
PPTX
ヒト並みの人工知能と現象学
by
Naoya Arakawa
PDF
脳の機能仮説についての構造化データ (BRA) の構築
by
The Whole Brain Architecture Initiative
PDF
RobotPaperChallenge 2019-07
by
robotpaperchallenge
PDF
Neuroscience inspired artificial intelligence
by
Yasunori Endo
PDF
WBAレクチャー#1脳機能の体系的理解を目指して(山川宏)
by
The Whole Brain Architecture Initiative
PPTX
意味ネットワーク
by
幸雄 村上
PPTX
Deep Learning入門
by
Ryosuke Uchiyama
PDF
Attentionの基礎からTransformerの入門まで
by
AGIRobots
PDF
論文紹介 Grounded Spatial Symbols for Task Planning Based on Experience
by
Akira Taniguchi
PDF
2021.1.28 understanding brain
by
Ryuichi Maruyama
PDF
IEEE ITSS Nagoya Chapter
by
Takayoshi Yamashita
PDF
20190804_icml_kyoto
by
Takayoshi Yamashita
PPTX
ディープラーニングのしくみと、どのように活用できるか?
by
Katsuya Yamada
PDF
学際領域研究者のたまごが思うこと10選-認知, 神経, 人工知能の視点から- 全脳アーキテクチャ若手の会 第19回勉強会 カジュアルトーク
by
Osawa Masahiko
PPTX
第6回 KAIM 金沢人工知能勉強会 人工知能を知るために脳を知る
by
tomitomi3 tomitomi3
PDF
G空間EXPO 2017
by
Kurata Takeshi
PDF
MIRU_Preview_JSAI2019
by
Takayoshi Yamashita
PDF
MIRU2018 tutorial
by
Takayoshi Yamashita
PDF
[DL輪読会]Relational Neural Expectation Maximization: Unsupervised Discovery of ...
by
Deep Learning JP
PDF
DeepLearningDay2016Summer
by
Takayoshi Yamashita
ヒト並みの人工知能と現象学
by
Naoya Arakawa
脳の機能仮説についての構造化データ (BRA) の構築
by
The Whole Brain Architecture Initiative
RobotPaperChallenge 2019-07
by
robotpaperchallenge
Neuroscience inspired artificial intelligence
by
Yasunori Endo
WBAレクチャー#1脳機能の体系的理解を目指して(山川宏)
by
The Whole Brain Architecture Initiative
意味ネットワーク
by
幸雄 村上
Deep Learning入門
by
Ryosuke Uchiyama
Attentionの基礎からTransformerの入門まで
by
AGIRobots
論文紹介 Grounded Spatial Symbols for Task Planning Based on Experience
by
Akira Taniguchi
2021.1.28 understanding brain
by
Ryuichi Maruyama
IEEE ITSS Nagoya Chapter
by
Takayoshi Yamashita
20190804_icml_kyoto
by
Takayoshi Yamashita
ディープラーニングのしくみと、どのように活用できるか?
by
Katsuya Yamada
学際領域研究者のたまごが思うこと10選-認知, 神経, 人工知能の視点から- 全脳アーキテクチャ若手の会 第19回勉強会 カジュアルトーク
by
Osawa Masahiko
第6回 KAIM 金沢人工知能勉強会 人工知能を知るために脳を知る
by
tomitomi3 tomitomi3
G空間EXPO 2017
by
Kurata Takeshi
MIRU_Preview_JSAI2019
by
Takayoshi Yamashita
MIRU2018 tutorial
by
Takayoshi Yamashita
[DL輪読会]Relational Neural Expectation Maximization: Unsupervised Discovery of ...
by
Deep Learning JP
DeepLearningDay2016Summer
by
Takayoshi Yamashita
Similar to 第3回WBAハッカソン第2回説明会資料(配布用)
PDF
第6回WBAシンポジウム:脳参照アーキテクチャ 駆動開発からの AGI構築ロードマップ
by
The Whole Brain Architecture Initiative
PDF
第7回WBAシンポジウム:基調講演
by
The Whole Brain Architecture Initiative
PDF
第3回全脳アーキテクチャ勉強会(山川)発表資料
by
ドワンゴ 人工知能研究所
PDF
進化したWBAアプローチの現在@第5回WBAシンポジウム: 山川宏
by
The Whole Brain Architecture Initiative
PPTX
第4回全脳アーキテクチャハッカソン説明会
by
The Whole Brain Architecture Initiative
PPTX
第7回WBAシンポジウム:WBAI活動報告
by
The Whole Brain Architecture Initiative
PPTX
「実ロボットの運動生成」
by
Yurika Doi
PDF
Hackathon 161010 pressen
by
WEBFARMER. ltd.
PDF
WBAI活動報告@第5回WBAシンポジウム
by
The Whole Brain Architecture Initiative
PPTX
A I 研究のガイドとしての 能力マップの開発
by
The Whole Brain Architecture Initiative
PPTX
全脳アーキテクチャ若手の会 強化学習
by
kwp_george
PPTX
汎用人工知能について(2015-12)
by
Naoya Arakawa
PDF
第3回WBAレクチャー:海馬体周辺におけるBRA駆動開発の進展
by
The Whole Brain Architecture Initiative
PDF
コネクショニズムと汎化 (全脳アーキテクチャ若手の会 第29回勉強会)
by
Takuma Yagi
PDF
ゲームAI製作のためのワークショップ(V)
by
Youichiro Miyake
PPTX
脳型AGI開発を着実に進めるために
by
The Whole Brain Architecture Initiative
PDF
BriCAプラットフォーム説明会(2022-05)
by
The Whole Brain Architecture Initiative
PDF
WBA tohoku feb greeting
by
ゆうき みのう
PPT
Brain-Inspired Robotics and Neural Dynamics: Lecture 02 (2015)
by
Hiroaki Wagatsuma
PPTX
全脳アーキテクチャ勉強会若手の会実現に向けて E-cell sprint 2014
by
Osawa Masahiko
第6回WBAシンポジウム:脳参照アーキテクチャ 駆動開発からの AGI構築ロードマップ
by
The Whole Brain Architecture Initiative
第7回WBAシンポジウム:基調講演
by
The Whole Brain Architecture Initiative
第3回全脳アーキテクチャ勉強会(山川)発表資料
by
ドワンゴ 人工知能研究所
進化したWBAアプローチの現在@第5回WBAシンポジウム: 山川宏
by
The Whole Brain Architecture Initiative
第4回全脳アーキテクチャハッカソン説明会
by
The Whole Brain Architecture Initiative
第7回WBAシンポジウム:WBAI活動報告
by
The Whole Brain Architecture Initiative
「実ロボットの運動生成」
by
Yurika Doi
Hackathon 161010 pressen
by
WEBFARMER. ltd.
WBAI活動報告@第5回WBAシンポジウム
by
The Whole Brain Architecture Initiative
A I 研究のガイドとしての 能力マップの開発
by
The Whole Brain Architecture Initiative
全脳アーキテクチャ若手の会 強化学習
by
kwp_george
汎用人工知能について(2015-12)
by
Naoya Arakawa
第3回WBAレクチャー:海馬体周辺におけるBRA駆動開発の進展
by
The Whole Brain Architecture Initiative
コネクショニズムと汎化 (全脳アーキテクチャ若手の会 第29回勉強会)
by
Takuma Yagi
ゲームAI製作のためのワークショップ(V)
by
Youichiro Miyake
脳型AGI開発を着実に進めるために
by
The Whole Brain Architecture Initiative
BriCAプラットフォーム説明会(2022-05)
by
The Whole Brain Architecture Initiative
WBA tohoku feb greeting
by
ゆうき みのう
Brain-Inspired Robotics and Neural Dynamics: Lecture 02 (2015)
by
Hiroaki Wagatsuma
全脳アーキテクチャ勉強会若手の会実現に向けて E-cell sprint 2014
by
Osawa Masahiko
More from The Whole Brain Architecture Initiative
PDF
第7回WBAシンポジウム:松嶋達也〜自己紹介と論点の提示〜スケーラブルなロボット学習システムに向けて
by
The Whole Brain Architecture Initiative
PDF
第7回WBAシンポジウム:予測符号化モデルとしての 深層予測学習とロボット知能化
by
The Whole Brain Architecture Initiative
PDF
第7回WBAシンポジウム:全脳確率的生成モデル(WB-PGM)〜世界モデルと推論に基づく汎用人工知能に向けて
by
The Whole Brain Architecture Initiative
PDF
第3回WBAレクチャー:BRA評価
by
The Whole Brain Architecture Initiative
PDF
第3回WBAレクチャー:BRAに基づく海馬体の確率的生成モデルの構築
by
The Whole Brain Architecture Initiative
PDF
第6回WBAシンポジウム:Humanity X.0 共生創発と情報の身体性
by
The Whole Brain Architecture Initiative
PDF
第6回WBAシンポジウム:人の手のひら AIの手のひら
by
The Whole Brain Architecture Initiative
PPTX
第6回WBAシンポジウム:人間は動物を必要とするが、 AIは人間を必要とするか?
by
The Whole Brain Architecture Initiative
PDF
第6回WBAシンポジウム:WBAI活動報告
by
The Whole Brain Architecture Initiative
PDF
技術進展がもたらす進化戦略の終焉
by
The Whole Brain Architecture Initiative
PDF
The 5th WBA Hackathon Orientation -- Cerenaut Part
by
The Whole Brain Architecture Initiative
PPTX
Task Details of the 5th Whole Brain Architecture Hackathon
by
The Whole Brain Architecture Initiative
PDF
Introduction to the 5th Whole Brain Architecture Hackathon Orientation
by
The Whole Brain Architecture Initiative
PDF
WBAレクチャー#1BRAの審査と登録(山川宏)
by
The Whole Brain Architecture Initiative
PDF
WBAレクチャー#1SCID法の実例 (布川絢子)
by
The Whole Brain Architecture Initiative
PDF
WBA勉強会 〜予測する脳と主体性の現象学〜
by
The Whole Brain Architecture Initiative
PDF
「境界のない外」 をどう考えられるか?──現象学の観点から──
by
The Whole Brain Architecture Initiative
PDF
現在のAIの到達点と残された課題@第5回WBAシンポジウム: 松尾豊
by
The Whole Brain Architecture Initiative
PDF
脳とAIの接点から何を学びうるのか@第5回WBAシンポジウム: 銅谷賢治
by
The Whole Brain Architecture Initiative
PDF
脳幹視覚系神経核における抑制と加算機能に関する仮説の提案
by
The Whole Brain Architecture Initiative
第7回WBAシンポジウム:松嶋達也〜自己紹介と論点の提示〜スケーラブルなロボット学習システムに向けて
by
The Whole Brain Architecture Initiative
第7回WBAシンポジウム:予測符号化モデルとしての 深層予測学習とロボット知能化
by
The Whole Brain Architecture Initiative
第7回WBAシンポジウム:全脳確率的生成モデル(WB-PGM)〜世界モデルと推論に基づく汎用人工知能に向けて
by
The Whole Brain Architecture Initiative
第3回WBAレクチャー:BRA評価
by
The Whole Brain Architecture Initiative
第3回WBAレクチャー:BRAに基づく海馬体の確率的生成モデルの構築
by
The Whole Brain Architecture Initiative
第6回WBAシンポジウム:Humanity X.0 共生創発と情報の身体性
by
The Whole Brain Architecture Initiative
第6回WBAシンポジウム:人の手のひら AIの手のひら
by
The Whole Brain Architecture Initiative
第6回WBAシンポジウム:人間は動物を必要とするが、 AIは人間を必要とするか?
by
The Whole Brain Architecture Initiative
第6回WBAシンポジウム:WBAI活動報告
by
The Whole Brain Architecture Initiative
技術進展がもたらす進化戦略の終焉
by
The Whole Brain Architecture Initiative
The 5th WBA Hackathon Orientation -- Cerenaut Part
by
The Whole Brain Architecture Initiative
Task Details of the 5th Whole Brain Architecture Hackathon
by
The Whole Brain Architecture Initiative
Introduction to the 5th Whole Brain Architecture Hackathon Orientation
by
The Whole Brain Architecture Initiative
WBAレクチャー#1BRAの審査と登録(山川宏)
by
The Whole Brain Architecture Initiative
WBAレクチャー#1SCID法の実例 (布川絢子)
by
The Whole Brain Architecture Initiative
WBA勉強会 〜予測する脳と主体性の現象学〜
by
The Whole Brain Architecture Initiative
「境界のない外」 をどう考えられるか?──現象学の観点から──
by
The Whole Brain Architecture Initiative
現在のAIの到達点と残された課題@第5回WBAシンポジウム: 松尾豊
by
The Whole Brain Architecture Initiative
脳とAIの接点から何を学びうるのか@第5回WBAシンポジウム: 銅谷賢治
by
The Whole Brain Architecture Initiative
脳幹視覚系神経核における抑制と加算機能に関する仮説の提案
by
The Whole Brain Architecture Initiative
第3回WBAハッカソン第2回説明会資料(配布用)
1.
WBAI理念 ビジョン: 人類と調和した人工知能のある世界 価値観: まなぶ: 関連する専門知識を学び、拡める みわたす:
広く対話を通じて見識を高める つくる: 共に作り上げる ミッション: 全脳アーキテクチャのオープンな開発を促進 基本理念
2.
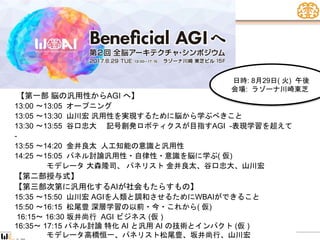
第2回全脳アーキテクチャ 【第一部 脳の汎用性からAGI へ】 13:00
〜13:05 オープニング 13:05 〜13:30 山川宏 汎用性を実現するために脳から学ぶべきこと 13:30 〜13:55 谷口忠大 記号創発ロボティクスが目指すAGI -表現学習を超えて - 13:55 〜14:20 金井良太 人工知能の意識と汎用性 14:25 〜15:05 パネル討論汎用性・自律性・意識を脳に学ぶ( 仮) モデレータ 大森隆司、 パネリスト 金井良太、谷口忠大、山川宏 【第二部授与式】 【第三部次第に汎用化するAIが社会もたらすもの】 15:35 〜15:50 山川宏 AGIを人類と調和させるためにWBAIができること 15:50 〜16:15 松尾豊 深層学習の以前・今・これから( 仮) 16:15〜 16:30 坂井尚行 AGI ビジネス (仮 ) 16:35〜 17:15 パネル討論 特化 AI と汎用 AI の技術とインパクト (仮 ) モデレータ高橋恒一、パネリスト松尾豊、坂井尚行、山川宏 日時: 8月29日( 火) 午後 会場: ラゾーナ川崎東芝
3.
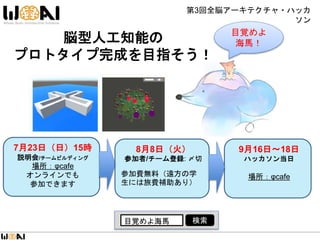
第3回全脳アーキテクチャ・ハッカ ソン 脳型人工知能の プロトタイプ完成を目指そう! 目覚めよ 海馬! 目覚めよ海馬 検索 7月23日(日)15時 説明会/チームビルディング 場所:φcafe オンラインでも 参加できます 9月16日~18日 ハッカソン当日 場所:φcafe 8月8日(火) 参加者/チーム登録: 〆切 参加費無料(遠方の学 生には旅費補助あり)
4.
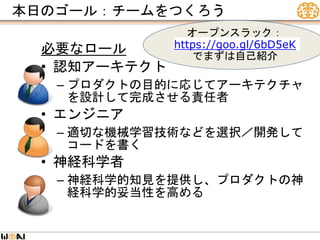
本日のゴール:チームをつくろう 必要なロール • 認知アーキテクト – プロダクトの目的に応じてアーキテクチャ を設計して完成させる責任者 •
エンジニア – 適切な機械学習技術などを選択/開発して コードを書く • 神経科学者 – 神経科学的知見を提供し、プロダクトの神 経科学的妥当性を高める オープンスラック: https://goo.gl/6bD5eK でまずは自己紹介
5.
本日のアジェンダ • 狙い(山川) • 課題(水谷) •システム説明(上野、坂井) •
参加方法等(水谷) • チームビルディング ※質疑応答は随時行います
6.
NPO法人 全脳アーキテ クチャ・イニシアチブ 山川宏 ハッカソンの狙い
7.
様々な人間のような知的特性 • 価値観を持つ • 生存能力を持つ •
意識を持つ • 自我を持つ • 様々なタスクに対応できる→汎用性 • などなど WBAIが目指す汎用性は、 現状のAIで人間レベルに実 現していな知的特性の一つ
8.
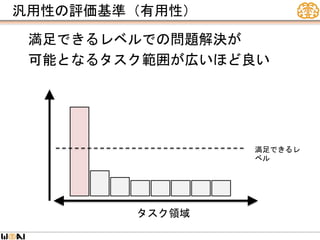
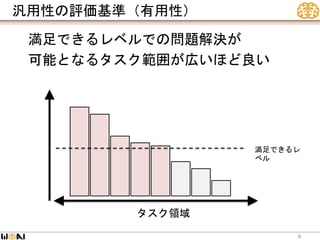
汎用性の評価基準(有用性) 満足できるレベルでの問題解決が 可能となるタスク範囲が広いほど良い タスク領域 満足できるレ ベル
9.
汎用性の評価基準(有用性) 満足できるレベルでの問題解決が 可能となるタスク範囲が広いほど良い 9 タスク領域 満足できるレ ベル
10.
深層学習の発展 脳に学ぶ Nengo (2015〜) 記号創発 ロボティク ス 世界の汎用人工知能(AGI)開発組織マップ 工学的実現 新皮質 中心 脳全体
11.
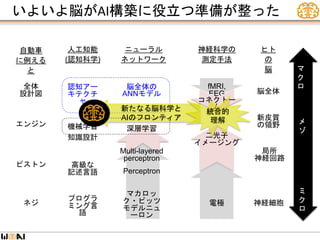
機械学習 知識設計 ニューラル ネットワーク 人工知能 (認知科学) 神経科学の 測定手法 高級な 記述言語 脳全体の ANNモデル 脳全体 認知アー キテクチ ャ ネジ マカロッ ク・ピッツ モデルニュ ーロン ピストン 自動車 に例える と 全体 設計図 ヒト の 脳 プログラ ミング言 語 新皮質 の領野 神経細胞 局所 神経回路 深層学習 エンジン マ ク ロ メ ゾ ミ ク ロ 電極 Multi-layered perceptron Perceptron 新たなる脳科学と AIのフロンティア fMRI, EEG コネクトー ム 二光子 イメージング 統合的 理解 いよいよ脳がAI構築に役立つ準備が整った
13.
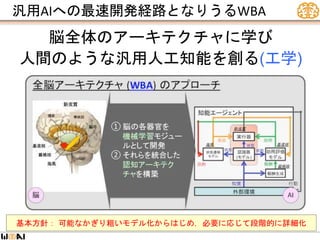
汎用AIへの最速開発経路となりうるWBA 脳全体のアーキテクチャに学び 人間のような汎用人工知能を創る(工学) 基本方針: 可能なかぎり粗いモデル化からはじめ,必要に応じて段階的に詳細化
14.
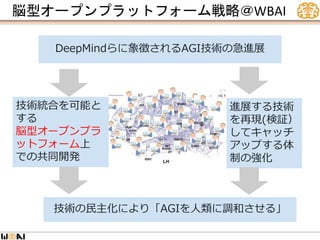
脳型オープンプラットフォーム戦略@WBAI 進展する技術 を再現(検証) してキャッチ アップする体 制の強化 技術統合を可能と する 脳型オープンプラ ットフォーム上 での共同開発 DeepMindらに象徴されるAGI技術の急進展 技術の民主化により「AGIを人類に調和させる」
15.
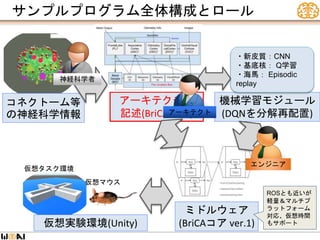
サンプルプログラム全体構成とロール コネクトーム等 の神経科学情報 仮想マウス 仮想実験環境(Unity) アーキテクチャ 記述(BriCA言語) ミドルウェア (BriCAコア ver.1) 機械学習モジュール (DQNを分解再配置) ・新皮質:CNN ・基底核: Q学習 ・海馬:
Episodic replay 仮想タスク環境 ROSとも近いが 軽量&マルチプ ラットフォーム 対応、仮想時間 もサポート エンジニア アーキテクト 神経科学者
16.
BriCA言語の基本仕様(JSON記述) "Modules" : [{ "Name"
: "BriCA1.MainModule", "Ports" : [ "Port1", "Port2" ], "SuperModule" : "SuperMainModule", }, { "Name" : "SuperMainModule", "Ports" : [ "PortS1", "PortS2" ], } ], "Connections" : [{ "Name" : "Con3", "FromModule" : "SuperMainModule", "FromPort" : "PortS1", "ToModule" : "BriCA1.MainModule", "ToPort" : "Port1", }, { "Name" : "Con4", "FromModule" : "BriCA1.MainModule", "FromPort" : "Port2", "ToModule" : "SuperMainModule", "ToPort" : "PortS2” ] } アーキテクチャ記述の基本要素 –Modules –Ports –Connections SuperMainModule "Ports" : [{ "Name" : "Port1", "Module" : "BriCA1.MainModule", "Type" : "Input", "Shape" : [3,1,1], }, { "Name" : "Port2", "Module" : "BriCA1.MainModule", "Type" : "Output", "Shape" : [3,1,1], …. BriCA1.MainModule Port1 Port2 PortS1 Con3 PortS2 Con4
17.
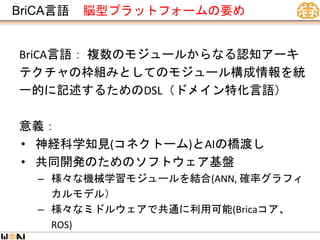
BriCA言語 脳型プラットフォームの要め BriCA言語: 複数のモジュールからなる認知アーキ テクチャの枠組みとしてのモジュール構成情報を統 一的に記述するためのDSL(ドメイン特化言語) 意義: •
神経科学知見(コネクトーム)とAIの橋渡し • 共同開発のためのソフトウェア基盤 – 様々な機械学習モジュールを結合(ANN, 確率グラフィ カルモデル) – 様々なミドルウェアで共通に利用可能(Bricaコア、 ROS)
18.
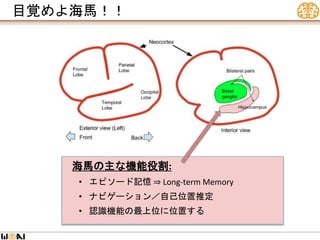
目覚めよ海馬!! 海馬の主な機能役割: • エピソード記憶 ⇒
Long-term Memory • ナビゲーション/自己位置推定 • 認識機能の最上位に位置する
19.
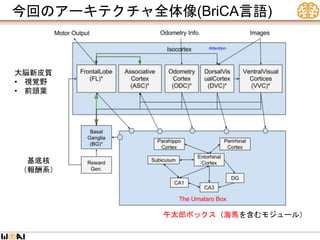
今回のアーキテクチャ全体像(BriCA言語) 午太郎ボックス(海馬を含むモジュール) 基底核 (報酬系) 大脳新皮質 • 視覚野 • 前頭葉
20.
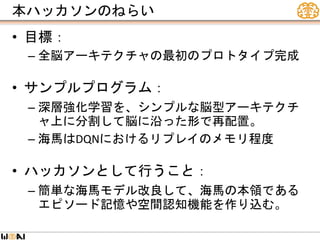
本ハッカソンのねらい • 目標: – 全脳アーキテクチャの最初のプロトタイプ完成 •
サンプルプログラム: – 深層強化学習を、シンプルな脳型アーキテクチ ャ上に分割して脳に沿った形で再配置。 – 海馬はDQNにおけるリプレイのメモリ程度 • ハッカソンとして行うこと: – 簡単な海馬モデル改良して、海馬の本領である エピソード記憶や空間認知機能を作り込む。
21.
NPO法人 全脳アーキテ クチャ・イニシアチブ 水谷 ハッカソンの課題
22.
海馬と汎用人工知能の実現 • 海馬が関わるとされる機能について個別に実装が 達成されてきていはいるが、1つのシステム上で同 時に達成できていない。 ・エピソード記憶 ・ワンショットラーニング
・ワーキングメモリー ・空間認知 ・自己位置推定 ・環境との相互作用 ・転移学習 ・効率的な学習 ・意思決定 ・アクション生成 ・注意 ・計画 ・想像力 ・直観 ・意識 • 今回のハッカソンでは、汎用人工知能システムの プロトタイプとなりうる「海馬」を組み込んだ脳 型の認知アーキテクチャの開発を行う。
23.
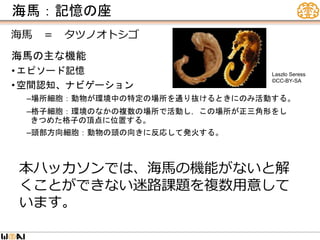
海馬:記憶の座 海馬の主な機能 • エピソード記憶 • 空間認知、ナビゲーション –場所細胞:動物が環境中の特定の場所を通り抜けるときにのみ活動する。 –格子細胞:環境のなかの複数の場所で活動し,この場所が正三角形をし きつめた格子の頂点に位置する。 –頭部方向細胞:動物の頭の向きに反応して発火する。 海馬
= タツノオトシゴ Laszlo Seress ©CC-BY-SA 本ハッカソンでは、海馬の機能がないと解 くことができない迷路課題を複数用意して います。
24.
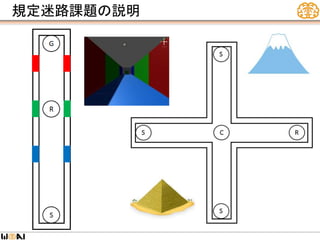
規定迷路課題の説明
25.
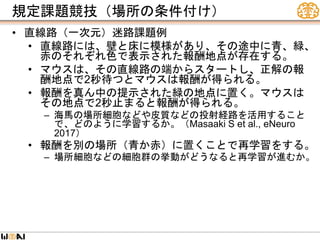
規定課題競技(場所の条件付け) • 直線路(一次元)迷路課題例 • 直線路には、壁と床に模様があり、その途中に青、緑、 赤のそれぞれ色で表示された報酬地点が存在する。 •
マウスは、その直線路の端からスタートし、正解の報 酬地点で2秒待つとマウスは報酬が得られる。 • 報酬を真ん中の提示された緑の地点に置く。マウスは その地点で2秒止まると報酬が得られる。 – 海馬の場所細胞などや皮質などの投射経路を活用すること で、どのように学習するか。(Masaaki S et al., eNeuro 2017) • 報酬を別の場所(青か赤)に置くことで再学習をする。 – 場所細胞などの細胞群の挙動がどうなると再学習が進むか。
26.
評価課題スタイル • 開発されたシステムの評価は、環境シミュレー タ(Unity/LIS)で構築された課題を用います。 • 以下の二つの課題スタイルが可能ですが、一つ のシステムでより多くの課題や機能を実現でき る汎用性の高いシステムが高く評価されます。 •
規定課題競技 – WBAIが用意した規定課題の解決を目標として、その 解決性能を競います。 • 自由課題競技 – 解決すべき課題を参加者自身が設定して、その解決 性能を競います。
27.
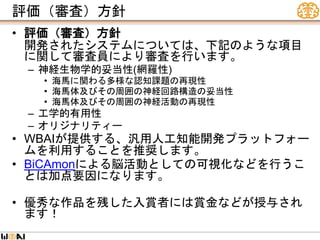
評価(審査)方針 • 評価(審査)方針 開発されたシステムについては、下記のような項目 に関して審査員により審査を行います。 – 神経生物学的妥当性(網羅性) •
海馬に関わる多様な認知課題の再現性 • 海馬体及びその周囲の神経回路構造の妥当性 • 海馬体及びその周囲の神経活動の再現性 – 工学的有用性 – オリジナリティー • WBAIが提供する、汎用人工知能開発プラットフォー ムを利用することを推奨します。 • BiCAmonによる脳活動としての可視化などを行うこ とは加点要因になります。 • 優秀な作品を残した入賞者には賞金などが授与され ます!
28.
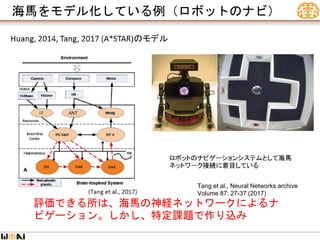
海馬をモデル化している例(ロボットのナビ) Tang et al.,
Neural Networks archive Volume 87: 27-37 (2017) 評価できる所は、海馬の神経ネットワークによるナ ビゲーション。しかし、特定課題で作り込み
29.
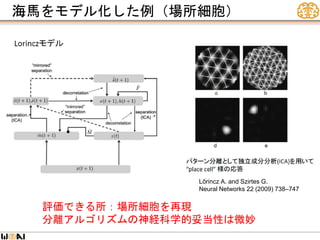
海馬をモデル化した例(場所細胞) Lőrincz A. and
Szirtes G. Neural Networks 22 (2009) 738–747 評価できる所:場所細胞を再現 分離アルゴリズムの神経科学的妥当性は微妙
30.
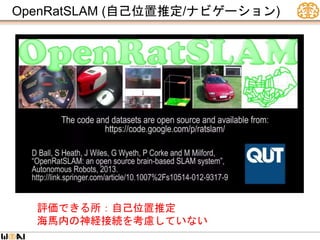
OpenRatSLAM (自己位置推定/ナビゲーション) 評価できる所:自己位置推定 海馬内の神経接続を考慮していない
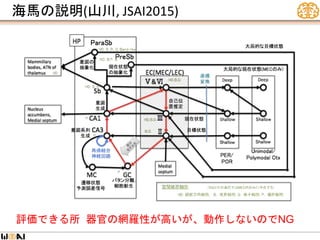
31.
海馬の説明(山川, JSAI2015) 評価できる所 器官の網羅性が高いが、動作しないのでNG
32.
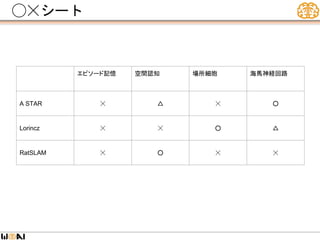
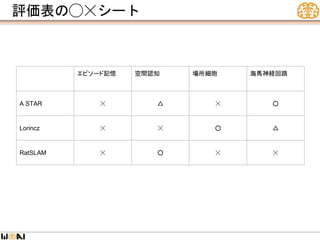
◯☓シート エピソード記憶 空間認知 場所細胞
海馬神経回路 A STAR ☓ △ ☓ ○ Lorincz ☓ ☓ ○ △ RatSLAM ☓ ○ ☓ ☓
33.
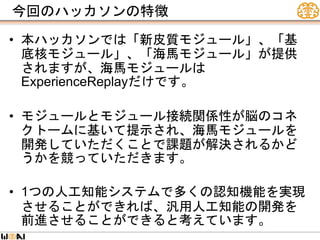
今回のハッカソンの特徴 • 本ハッカソンでは「新皮質モジュール」、「基 底核モジュール」、「海馬モジュール」が提供 されますが、海馬モジュールは ExperienceReplayだけです。 • モジュールとモジュール接続関係性が脳のコネ クトームに基いて提示され、海馬モジュールを 開発していただくことで課題が解決されるかど うかを競っていただきます。 •
1つの人工知能システムで多くの認知機能を実現 させることができれば、汎用人工知能の開発を 前進させることができると考えています。
34.
NPO法人 全脳アーキテ クチャ・イニシアチブ 坂井/上野 システム説明
35.
Agenda 1. システム概要 2. システム要求と環境構築 3.
提供される成果物とサポート 4. デモと解説
36.
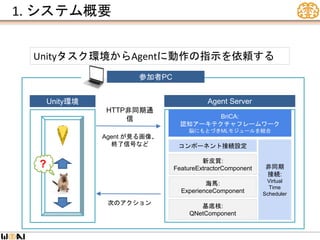
1. システム概要 Unityタスク環境からAgentに動作の指示を依頼する Unity環境 参加者PC Agent Server Agent
が見る画像、 終了信号など 次のアクション HTTP非同期通 信 ? 非同期 接続: Virtual Time Scheduler 新皮質: FeatureExtractorComponent 海馬: ExperienceComponent 基底核: QNetComponent BriCA: 認知アーキテクチャフレームワーク 脳にもとづきMLモジュールを結合 コンポーネント接続設定
37.
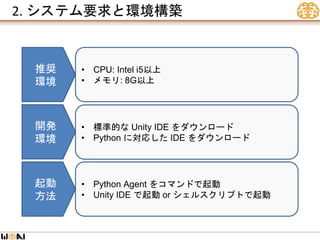
2. システム要求と環境構築 推奨 環境 開発 環境 起動 方法 • CPU:
Intel i5以上 • メモリ: 8G以上 • 標準的な Unity IDE をダウンロード • Python に対応した IDE をダウンロード • Python Agent をコマンドで起動 • Unity IDE で起動 or シェルスクリプトで起動
38.
3. 提供される成果物とサポート 成果物 サポート • Unity
タスク環境 ➢ 1次元迷路、プラス迷路、その他 • Agent Server ソースコード ドキュメント • 用語集 • アーキテクチャ概要 • ハッカソンにおける変更箇所 • 環境構築手順 • Slack チャネルにおける質疑応答 ➢ アドバイザリチームに課題、テクニカルともに相 談可能 ➢ 状況によってはリアルタイムで回答できないこと があります ➢ FAQ に追記していく予定
39.
調査 皆さんの使用しているOSを教えてください
40.
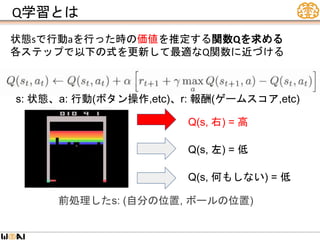
Q学習とは 状態sで行動aを行った時の価値を推定する関数Qを求める 各ステップで以下の式を更新して最適なQ関数に近づける Q(s, 左) =
低 Q(s, 右) = 高 Q(s, 何もしない) = 低 s: 状態、a: 行動(ボタン操作,etc)、r: 報酬(ゲームスコア,etc) 前処理したs: (自分の位置, ボールの位置)
41.
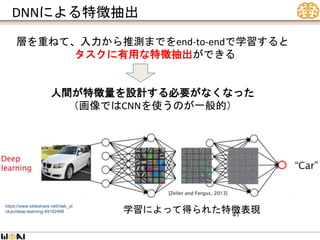
DNNによる特徴抽出 41 層を重ねて、入力から推測までをend-to-endで学習すると タスクに有用な特徴抽出ができる 人間が特徴量を設計する必要がなくなった (画像ではCNNを使うのが一般的) https://www.slideshare.net/nlab_ut okyo/deep-learning-49182466 学習によって得られた特徴表現
42.
DQN (Deep Q-Network)とは 42 Q学習のQ関数をDNNで近似した DNNを用いたend-to-endの学習によって 画像から直接価値を推定することができるようになった 価値 DEEP https://www.slideshare.net /nlab_utokyo/deep- learning-49182466
43.
observation - RGB Image 277*277 -
depth Image 32*32 odometry - 移動速度,角速 度 (値をなます) Episode 終了信号 reward - bool - int value Unity設計の概要-Agentに送られるもの
44.
課題の切り替え - 課題はUnity Sceneご とに設計されている. -
一定回数課題をクリ アすると次の課題へ 進む - エージェントから actionが送られてくる まで待機状態 Unity設計の概要-課題の進行
45.
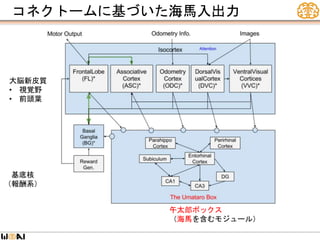
コネクトームに基づいた海馬入出力 午太郎ボックス (海馬を含むモジュール) 基底核 (報酬系) 大脳新皮質 • 視覚野 • 前頭葉
46.
Agent設計 [velocity, angular velocity] action
value (0 or 1 or 2)
47.
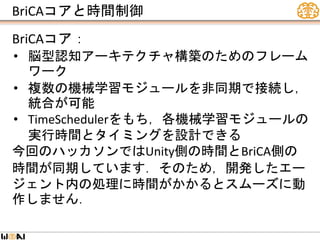
BriCAコアと時間制御 BriCAコア: • 脳型認知アーキテクチャ構築のためのフレーム ワーク • 複数の機械学習モジュールを非同期で接続し, 統合が可能 •
TimeSchedulerをもち,各機械学習モジュールの 実行時間とタイミングを設計できる 今回のハッカソンではUnity側の時間とBriCA側の 時間が同期しています.そのため,開発したエー ジェント内の処理に時間がかかるとスムーズに動 作しません.
48.
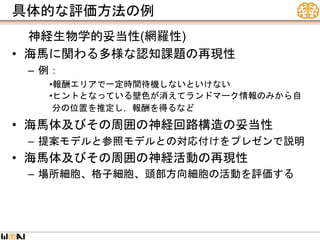
具体的な評価方法の例 神経生物学的妥当性(網羅性) • 海馬に関わる多様な認知課題の再現性 – 例: •報酬エリアで一定時間待機しないといけない •ヒントとなっている壁色が消えてランドマーク情報のみから自 分の位置を推定し,報酬を得るなど •
海馬体及びその周囲の神経回路構造の妥当性 – 提案モデルと参照モデルとの対応付けをプレゼンで説明 • 海馬体及びその周囲の神経活動の再現性 – 場所細胞、格子細胞、頭部方向細胞の活動を評価する
49.
評価表の◯☓シート エピソード記憶 空間認知 場所細胞
海馬神経回路 A STAR ☓ △ ☓ ○ Lorincz ☓ ☓ ○ △ RatSLAM ☓ ○ ☓ ☓
50.
NPO法人 全脳アーキテ クチャ・イニシアチブ 水谷 参加方法など
51.
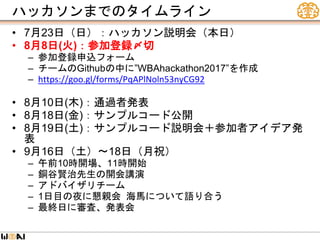
ハッカソンまでのタイムライン • 7月23日(日):ハッカソン説明会(本日) • 8月8日(火):参加登録〆切 –
参加登録申込フォーム – チームのGithubの中に”WBAhackathon2017”を作成 – https://goo.gl/forms/PqAPlNoln53nyCG92 • 8月10日(木):通過者発表 • 8月18日(金):サンプルコード公開 • 8月19日(土):サンプルコード説明会+参加者アイデア発 表 • 9月16日(土)〜18日(月祝) – 午前10時開場、11時開始 – 銅谷賢治先生の開会講演 – アドバイザリチーム – 1日目の夜に懇親会 海馬について語り合う – 最終日に審査、発表会
52.
第3回WBAハッカソン・開催概要 • 開催日 – 2017年9月16日(土)〜18日(月・祝日) •
開催場所 – φカフェ • 東京都文京区本郷5-24-5 角川本郷ビル6階 • 参加費 – 無料 – 会場までの交通費、宿泊費、懇親会費は自己負 担です。 • 但し、一定の規準を満たした学生の方には旅費、宿泊 費の補助があります。
53.
宿泊案内 • 宿泊は必須ではありませんが、希望者は近隣の宿 泊施設に宿泊可能です。 – 9月15日(金・前泊)、16日(土)、17日(日)に神保 町にある宿泊施設(サクラホテル神保町)に実費(約 4,300円)で宿泊いただけます –
登録フォームでホテルの宿泊希望をお知らせ下さい。 – 最大20名
54.
その他 • 計算機環境 – 参加者自身で持ち込んでいただく •
プログラムコードの公開 全脳アーキテクチャー開発の推進のため、ハッカソンで 作成したプログラムコードの公開をお願いします。 プレ ゼン資料も – WBAI Contributor Agreement に署名・提出 – Apache License (Version 2.0) の下での公開 – Github上のREADME(英文)の付与 • 学生参加者の旅費等の補助 学生の参加者のうち、下記の条件を満たすものには、 WBAIから旅費および宿泊費の支給を受けることができま す(上限一人あたり6万5千円)。 – ハッカソンの全日程(9月16日~18日)に参加していただくこ と。 – 本ハッカソンで作成した作品の公開(条件については下記参 照) 詳細はこちらを参照ください。
55.
WBAI理念 ビジョン: 人類と調和した人工知能のある世界 価値観: まなぶ: 関連する専門知識を学び、拡める みわたす:
広く対話を通じて見識を高める つくる: 共に作り上げる ミッション: 全脳アーキテクチャのオープンな開発を促進 基本理念
Download


![BriCA言語の基本仕様(JSON記述)
"Modules" : [{
"Name" : "BriCA1.MainModule",
"Ports" : [ "Port1", "Port2" ],
"SuperModule" : "SuperMainModule",
},
{
"Name" : "SuperMainModule",
"Ports" : [ "PortS1", "PortS2" ],
}
],
"Connections" : [{
"Name" : "Con3",
"FromModule" : "SuperMainModule",
"FromPort" : "PortS1",
"ToModule" : "BriCA1.MainModule",
"ToPort" : "Port1",
},
{
"Name" : "Con4",
"FromModule" : "BriCA1.MainModule",
"FromPort" : "Port2",
"ToModule" : "SuperMainModule",
"ToPort" : "PortS2”
]
}
アーキテクチャ記述の基本要素
–Modules
–Ports
–Connections
SuperMainModule
"Ports" : [{
"Name" : "Port1",
"Module" : "BriCA1.MainModule",
"Type" : "Input",
"Shape" : [3,1,1],
},
{
"Name" : "Port2",
"Module" : "BriCA1.MainModule",
"Type" : "Output",
"Shape" : [3,1,1],
….
BriCA1.MainModule
Port1 Port2
PortS1
Con3
PortS2
Con4](https://image.slidesharecdn.com/2017-0723-3rdhackathonjp-170801091321/85/3-WBA-2-16-320.jpg)

![Agent設計
[velocity, angular velocity]
action value
(0 or 1 or 2)](https://image.slidesharecdn.com/2017-0723-3rdhackathonjp-170801091321/85/3-WBA-2-46-320.jpg)



























![[DL輪読会]Relational Neural Expectation Maximization: Unsupervised Discovery of ...](https://cdn.slidesharecdn.com/ss_thumbnails/20180511dlltrelationalneuralexpectationmaximizationver21-180511004516-thumbnail.jpg?width=640&height=640&fit=bounds)








































