Roadmap to Membership of RICS - Pathways and Routes
Synopsis of the Project
1. SYNOPSIS OF THE THESIS
Objective: To design a robot arm and discuss the techniques to control its position
efficiently.
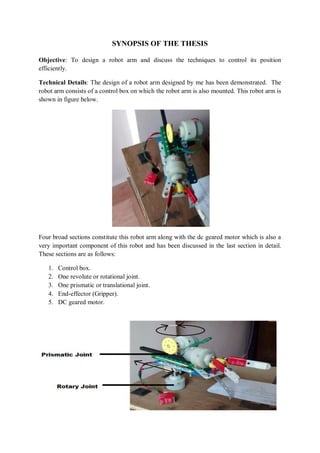
Technical Details: The design of a robot arm designed by me has been demonstrated. The
robot arm consists of a control box on which the robot arm is also mounted. This robot arm is
shown in figure below.
Four broad sections constitute this robot arm along with the dc geared motor which is also a
very important component of this robot and has been discussed in the last section in detail.
These sections are as follows:
1. Control box.
2. One revolute or rotational joint.
3. One prismatic or translational joint.
4. End-effector (Gripper).
5. DC geared motor.
2. As the robot is having two joints- one revolute and one prismatic, it means that the robot has
two degrees of freedom (DOF) as shown in Figure above.
The robot is having a DOF less than 6. So, it will have a constrained motion in 3-D space. It
has basically a planar manipulator configuration which sweeps a 2-D plane. The plane is
actually a circular plane. The arm of the robot is having a rotary joint which gives it one
degree of freedom and the wrist is having a prismatic joint giving it another degree of
freedom. There is one end-effector attached to the wrist which is actually a gripper for pick
and drop job. The base, arm and the wrist of the robot have been depicted in Figure below.
Usefulness: This thesis includes the design of a simple robot arm or manipulator with all the
complexities involved discussed in great detail. The robot has been designed without using
any microcontroller which is an achievement in itself. Only simple dc geared motors,
switches, battery, gears, a rack, and some mechanix parts. This has made the robot very cost-
effective. The PID control scheme has been discussed in detail which will help in the
effective control and stability of a robot arm although this has not been implemented.
The robot arm can be used for demonstrations of the two important types of joints- prismatic
and rotary.
Limitations: The microcontrollers can be used to improve the capabilities of the robot arm.
Stepper motors can be used instead of dc geared motor. Both these methods will increase the
efficiency, accuracy and precision of the arm. The robot lacks these qualities.
Future Scope: The control technique discussed in this thesis can only be implemented on the
robot if it uses a microcontroller. Another very important work can be the implementation of
Brain-Computer Interface on the robot arm.