Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
shyamalaseec
PPT, PDF
15 views
23MA401 NM Numerical integration anddifferenciation
23MA401 NM Unit 3 Numerical integration anddifferenciation
Engineering
◦
Read more
0
Save
Share
Embed
Embed presentation
Download
Download to read offline
1
/ 19
2
/ 19
3
/ 19
4
/ 19
5
/ 19
6
/ 19
7
/ 19
8
/ 19
9
/ 19
10
/ 19
11
/ 19
12
/ 19
13
/ 19
14
/ 19
15
/ 19
16
/ 19
17
/ 19
18
/ 19
19
/ 19
More Related Content
PPT
1519 differentiation-integration-02
by
Dr Fereidoun Dejahang
PPT
LECF03-Numerical-Differentiation-and-Integration.ppt
by
MacKy29
PDF
Overviewing the techniques of Numerical Integration.pdf
by
ArijitDhali
PDF
Applied numerical methods lec10
by
Yasser Ahmed
PDF
Efficient Accuracy: A Study on Numerical Integration.
by
ShaifulIslam56
PPTX
NUMERICAL METHOD'S
by
srijanani16
PPTX
The Trapezoidal rule is the first of the Newton-Cotes closed integration form...
by
NileshBirajdar8
PPT
Numerical hhhhhhhhhhhhhhhhhIntegration.ppt
by
BARUNSINGH43
1519 differentiation-integration-02
by
Dr Fereidoun Dejahang
LECF03-Numerical-Differentiation-and-Integration.ppt
by
MacKy29
Overviewing the techniques of Numerical Integration.pdf
by
ArijitDhali
Applied numerical methods lec10
by
Yasser Ahmed
Efficient Accuracy: A Study on Numerical Integration.
by
ShaifulIslam56
NUMERICAL METHOD'S
by
srijanani16
The Trapezoidal rule is the first of the Newton-Cotes closed integration form...
by
NileshBirajdar8
Numerical hhhhhhhhhhhhhhhhhIntegration.ppt
by
BARUNSINGH43
Similar to 23MA401 NM Numerical integration anddifferenciation
PPT
Numerical integration
by
Tarun Gehlot
PPT
MATLAB : Numerical Differention and Integration
by
Ainul Islam
PPTX
Es272 ch6
by
Batuhan Yıldırım
PDF
Numerical integration
by
DrDeepaChauhan
PDF
A NEW STUDY OF TRAPEZOIDAL, SIMPSON’S1/3 AND SIMPSON’S 3/8 RULES OF NUMERICAL...
by
mathsjournal
PDF
A NEW STUDY OF TRAPEZOIDAL, SIMPSON’S1/3 AND SIMPSON’S 3/8 RULES OF NUMERICAL...
by
mathsjournal
PDF
A NEW STUDY OF TRAPEZOIDAL, SIMPSON’S1/3 AND SIMPSON’S 3/8 RULES OF NUMERICAL...
by
mathsjournal
PDF
Applied Mathematics and Sciences: An International Journal (MathSJ)
by
mathsjournal
PPTX
Nsm ppt.ppt
by
shivanisaini25
PPTX
CE324-Module-9-10-Week-5-1st-Session.pptx
by
HannahPil2
PPT
Calc 4.6
by
hartcher
PPT
Numerical integration
by
Sunny Chauhan
PDF
Ankit_Practical_File-1.pdf A detailed overview of Rizir as a brand
by
m52870494
PDF
NUMERICAL ANALYSIS.pdf
by
VAIBHAVSAHU55
PPTX
NUMERICAL INTEGRATION : ERROR FORMULA, GAUSSIAN QUADRATURE FORMULA
by
KHORASIYA DEVANSU
PDF
Numerical Methods 3
by
Dr. Nirav Vyas
PPTX
Numerical integration
by
Mohammed_AQ
PPTX
Newton cotes integration method
by
shashikant pabari
PPT
coursessssssssssssssssssssssssssssssssssssssssss-7.ppt
by
Mahmood Hameed
PPTX
Numerical integration for engineering students.pptx
by
Geeta Arora
Numerical integration
by
Tarun Gehlot
MATLAB : Numerical Differention and Integration
by
Ainul Islam
Es272 ch6
by
Batuhan Yıldırım
Numerical integration
by
DrDeepaChauhan
A NEW STUDY OF TRAPEZOIDAL, SIMPSON’S1/3 AND SIMPSON’S 3/8 RULES OF NUMERICAL...
by
mathsjournal
A NEW STUDY OF TRAPEZOIDAL, SIMPSON’S1/3 AND SIMPSON’S 3/8 RULES OF NUMERICAL...
by
mathsjournal
A NEW STUDY OF TRAPEZOIDAL, SIMPSON’S1/3 AND SIMPSON’S 3/8 RULES OF NUMERICAL...
by
mathsjournal
Applied Mathematics and Sciences: An International Journal (MathSJ)
by
mathsjournal
Nsm ppt.ppt
by
shivanisaini25
CE324-Module-9-10-Week-5-1st-Session.pptx
by
HannahPil2
Calc 4.6
by
hartcher
Numerical integration
by
Sunny Chauhan
Ankit_Practical_File-1.pdf A detailed overview of Rizir as a brand
by
m52870494
NUMERICAL ANALYSIS.pdf
by
VAIBHAVSAHU55
NUMERICAL INTEGRATION : ERROR FORMULA, GAUSSIAN QUADRATURE FORMULA
by
KHORASIYA DEVANSU
Numerical Methods 3
by
Dr. Nirav Vyas
Numerical integration
by
Mohammed_AQ
Newton cotes integration method
by
shashikant pabari
coursessssssssssssssssssssssssssssssssssssssssss-7.ppt
by
Mahmood Hameed
Numerical integration for engineering students.pptx
by
Geeta Arora
More from shyamalaseec
PPTX
23MA401 Numerical Methods Boundary value problems
by
shyamalaseec
PPTX
23MA202-Mathematical Foundations for Engineering - ODE
by
shyamalaseec
PPT
23MA202-Mathematical Foundations for Engineering - Laplace Transform
by
shyamalaseec
PPT
23MA202 Mathematical Foundations for Engineering - Analytic Founction
by
shyamalaseec
PPTX
PPT of Interpolation for Newtons forward.pptx
by
shyamalaseec
PDF
PPT of Interpolation for Newtons forward.pdf
by
shyamalaseec
PPTX
Bivariate Random Variable Correlation Analysis
by
shyamalaseec
PPT
Matrices and Calculus Volume of Solids Examples
by
shyamalaseec
PPT
probability and Statistics Binomial Distribution
by
shyamalaseec
23MA401 Numerical Methods Boundary value problems
by
shyamalaseec
23MA202-Mathematical Foundations for Engineering - ODE
by
shyamalaseec
23MA202-Mathematical Foundations for Engineering - Laplace Transform
by
shyamalaseec
23MA202 Mathematical Foundations for Engineering - Analytic Founction
by
shyamalaseec
PPT of Interpolation for Newtons forward.pptx
by
shyamalaseec
PPT of Interpolation for Newtons forward.pdf
by
shyamalaseec
Bivariate Random Variable Correlation Analysis
by
shyamalaseec
Matrices and Calculus Volume of Solids Examples
by
shyamalaseec
probability and Statistics Binomial Distribution
by
shyamalaseec
Recently uploaded
PPTX
علي نفط.pptx هندسة النفط هندسة النفط والغاز
by
engpe23e27
PDF
Albert Pintoy - Specializing In Low-Latency
by
Albert Pintoy
PPTX
22304_BCO_CO3_LO4_PPT MSBTE Building construction.pptx
by
PrasadBahekar4
PDF
Presentation-on-Energy-Transition-in-Bangladesh-Employment-and-Skills.pdf
by
syedSajib8
PPTX
Optimizing Plant Maintenance — Key Elements of a Successful Maintenance Plan ...
by
MaintWiz Technologies Private Limited
PPT
63490613-Boiler-Tube-Leakage-analysis-symptoms-causes.ppt
by
allahdittashafi
PPTX
How to Implement Kaizen in Your Organization for Continuous Improvement Success
by
MaintWiz Technologies Private Limited
PDF
Hybrid Anomaly Detection Mechanism for IOT Networks
by
IJCNCJournal
PDF
Human computer Interface ppt aUNIT 3.pdf
by
Osmania University
PPTX
firewall Selection in production life pptx
by
ssuserb1479b
PPTX
Best CMMS for IoT Integration: Real-Time Asset Intelligence & Smart Maintenan...
by
MaintWiz Technologies Private Limited
PPTX
Optimizing Operations: Key Elements of a Successful Plant Maintenance Plan — ...
by
MaintWiz Technologies Private Limited
PPTX
How to Use Mobile CMMS to Improve Maintenance Operations & Field Productivity
by
MaintWiz Technologies Private Limited
PPTX
Power point presentation on introduction of software engineering
by
s6050748
PDF
IPEC Presentation - Partial discharge Pro .pdf
by
waely1983
PPTX
Plant Performance Strategies: Enhanced Reliability & Operational Efficiency w...
by
MaintWiz Technologies Private Limited
PPTX
Cloud vs On-Premises CMMS — Which Maintenance Platform Is Better for Your Plant?
by
MaintWiz Technologies Private Limited
PDF
Lecture -06-Hybrid Policies - Chapter 7- Weeks 6-7.pdf
by
salaarmike
PDF
Handheld_Laser_Welding_Presentation 2.pdf
by
sinezioveluz
PPTX
Introduction Blockchains and Smart Contracts
by
bobinson
علي نفط.pptx هندسة النفط هندسة النفط والغاز
by
engpe23e27
Albert Pintoy - Specializing In Low-Latency
by
Albert Pintoy
22304_BCO_CO3_LO4_PPT MSBTE Building construction.pptx
by
PrasadBahekar4
Presentation-on-Energy-Transition-in-Bangladesh-Employment-and-Skills.pdf
by
syedSajib8
Optimizing Plant Maintenance — Key Elements of a Successful Maintenance Plan ...
by
MaintWiz Technologies Private Limited
63490613-Boiler-Tube-Leakage-analysis-symptoms-causes.ppt
by
allahdittashafi
How to Implement Kaizen in Your Organization for Continuous Improvement Success
by
MaintWiz Technologies Private Limited
Hybrid Anomaly Detection Mechanism for IOT Networks
by
IJCNCJournal
Human computer Interface ppt aUNIT 3.pdf
by
Osmania University
firewall Selection in production life pptx
by
ssuserb1479b
Best CMMS for IoT Integration: Real-Time Asset Intelligence & Smart Maintenan...
by
MaintWiz Technologies Private Limited
Optimizing Operations: Key Elements of a Successful Plant Maintenance Plan — ...
by
MaintWiz Technologies Private Limited
How to Use Mobile CMMS to Improve Maintenance Operations & Field Productivity
by
MaintWiz Technologies Private Limited
Power point presentation on introduction of software engineering
by
s6050748
IPEC Presentation - Partial discharge Pro .pdf
by
waely1983
Plant Performance Strategies: Enhanced Reliability & Operational Efficiency w...
by
MaintWiz Technologies Private Limited
Cloud vs On-Premises CMMS — Which Maintenance Platform Is Better for Your Plant?
by
MaintWiz Technologies Private Limited
Lecture -06-Hybrid Policies - Chapter 7- Weeks 6-7.pdf
by
salaarmike
Handheld_Laser_Welding_Presentation 2.pdf
by
sinezioveluz
Introduction Blockchains and Smart Contracts
by
bobinson
23MA401 NM Numerical integration anddifferenciation
1.
23MA401- Numerical Methods Numerical
Differentiation and Integration By Dr. S.Shyamala AP/Maths Ms.G. Nandhini AP/Maths Excel Engineering College (Autonomous)
2.
Copyright © 2006
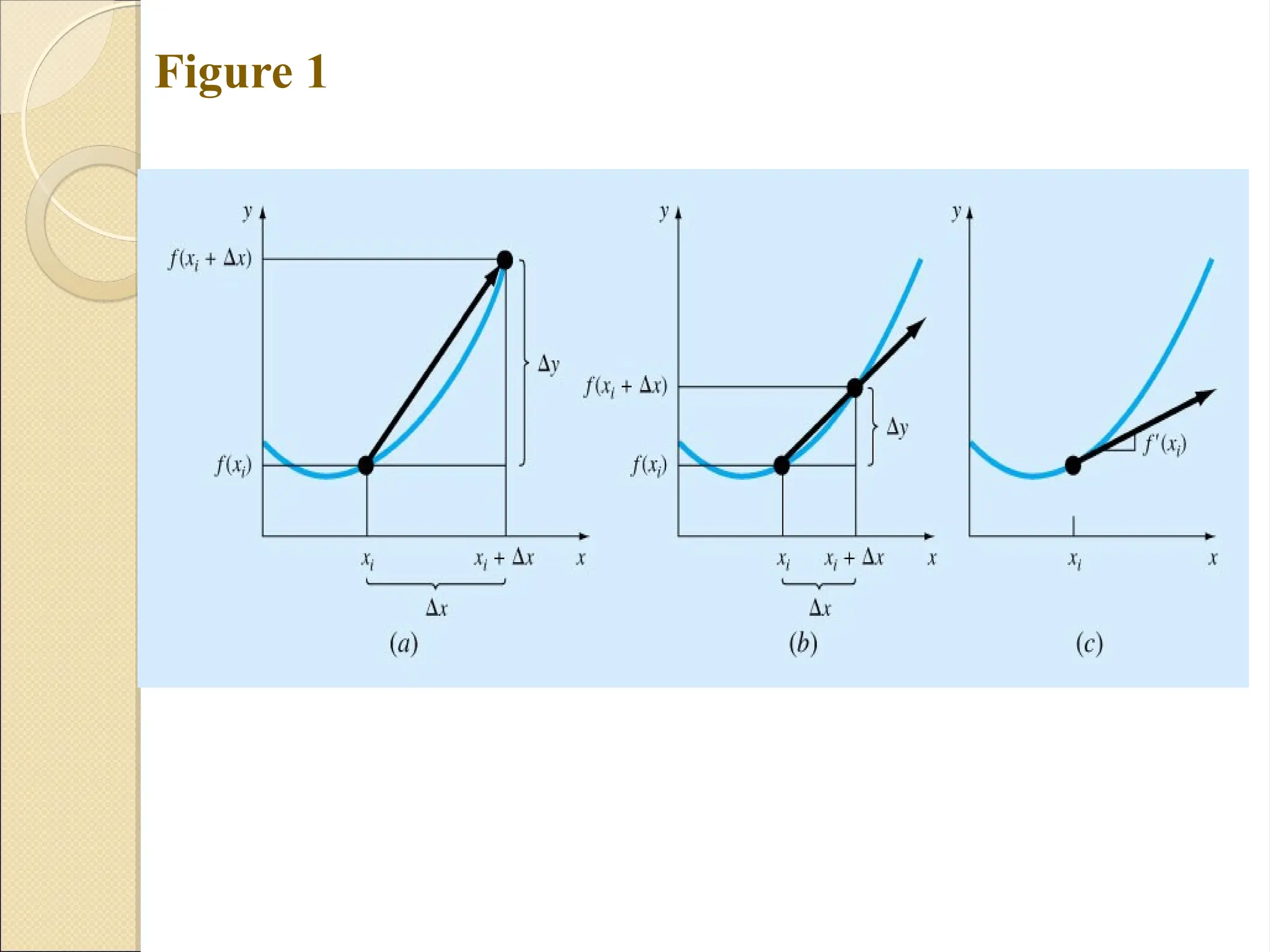
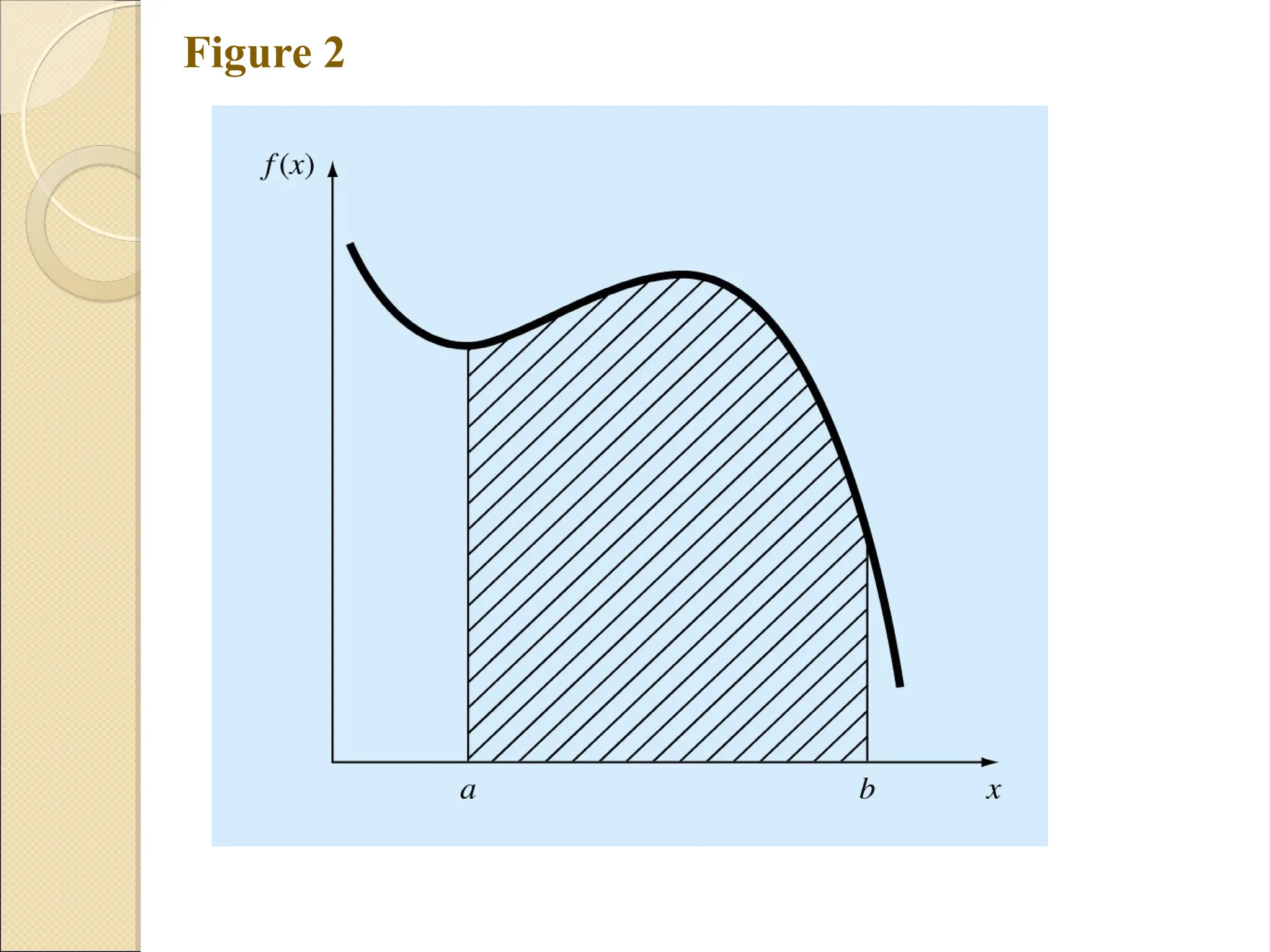
The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Numerical Differentiation and Numerical Differentiation and Integration Integration b a i i x i i dx x f I x x f x x f dx dy x x f x x f x y ) ( ) ( ) ( lim ) ( ) ( 0 Standing in the heart of calculus are the mathematical concepts of differentiation and integration:
3.
Copyright © 2006
The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Figure 1
4.
Copyright © 2006
The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Figure 2
5.
Copyright © 2006
The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Non-computer Methods for Non-computer Methods for Differentiation and Integration Differentiation and Integration The function to be differentiated or integrated will typically be in one of the following three forms: A simple continuous function such as polynomial, an exponential, or a trigonometric function. A complicated continuous function that is difficult or impossible to differentiate or integrate directly. A tabulated function where values of x and f(x) are given at a number of discrete points, as is often the case with experimental or field data.
6.
Copyright © 2006
The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Figure 3
7.
Copyright © 2006
The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Figure 4
8.
Copyright © 2006
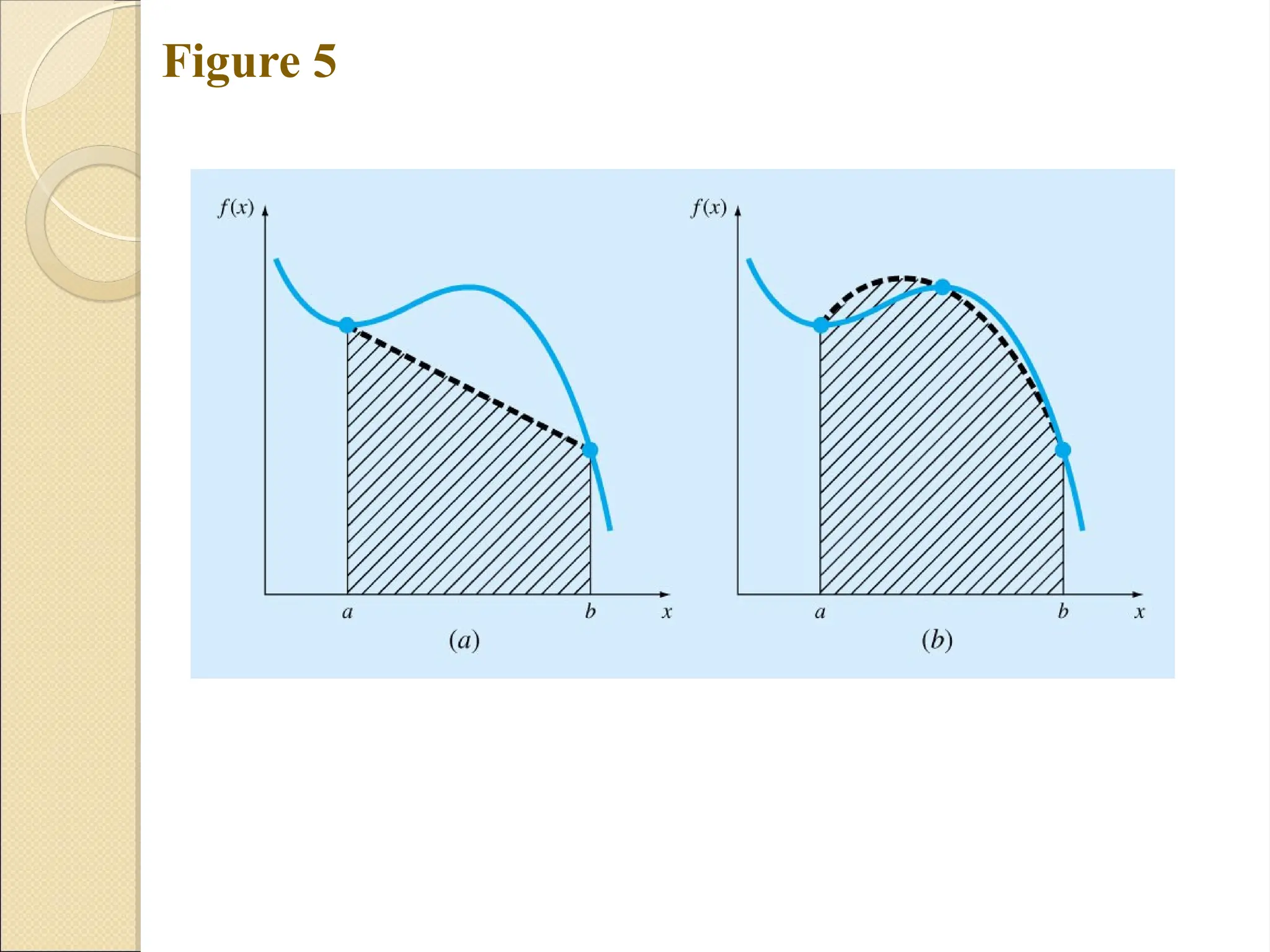
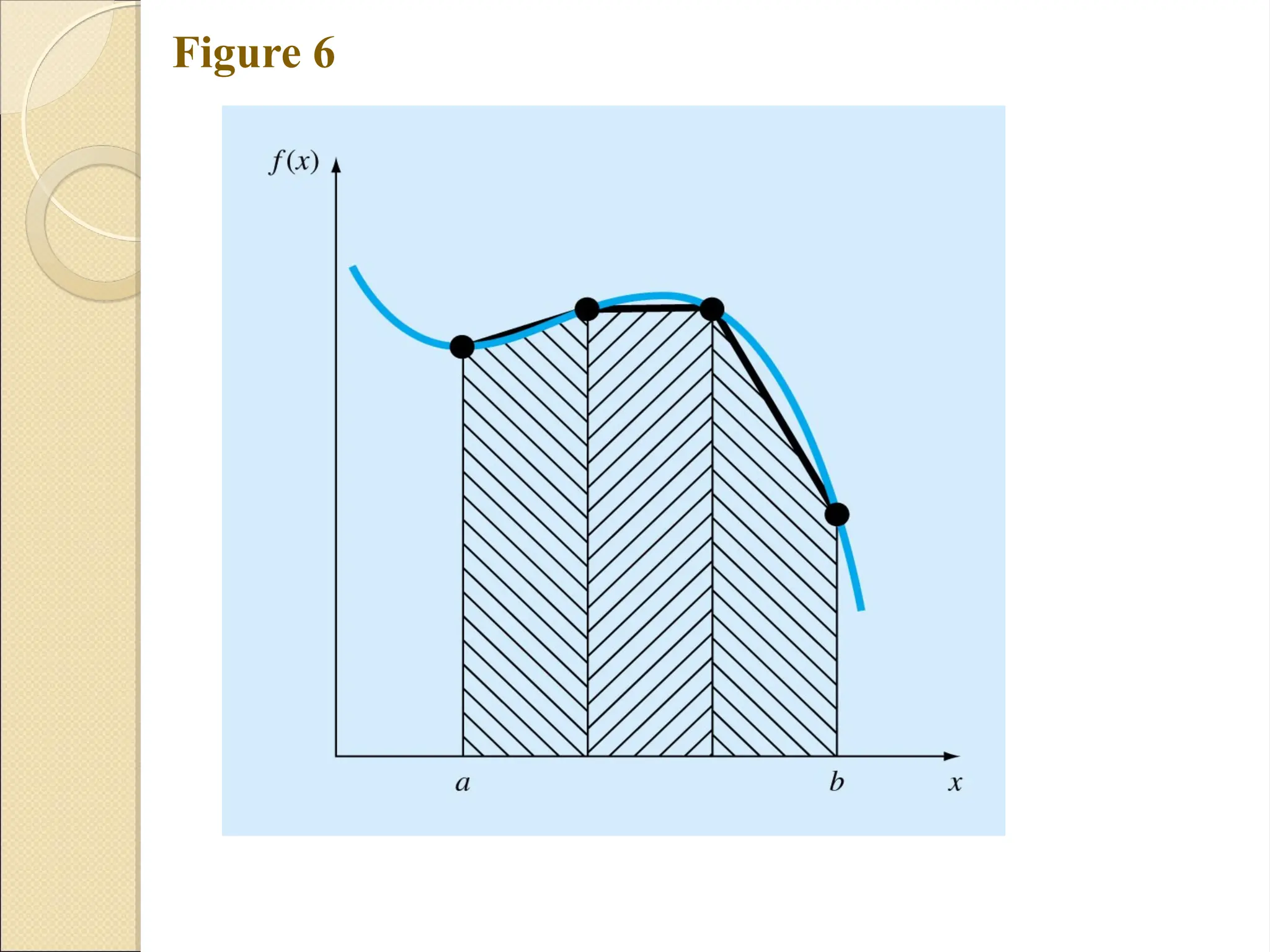
The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Newton-Cotes Integration Formulas Newton-Cotes Integration Formulas The Newton-Cotes formulas are the most common numerical integration schemes. They are based on the strategy of replacing a complicated function or tabulated data with an approximating function that is easy to integrate: n n n n n b a n b a x a x a x a a x f dx x f dx x f I 1 1 1 0 ) ( ) ( ) (
9.
Copyright © 2006
The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Figure 5
10.
Copyright © 2006
The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Figure 6
11.
Copyright © 2006
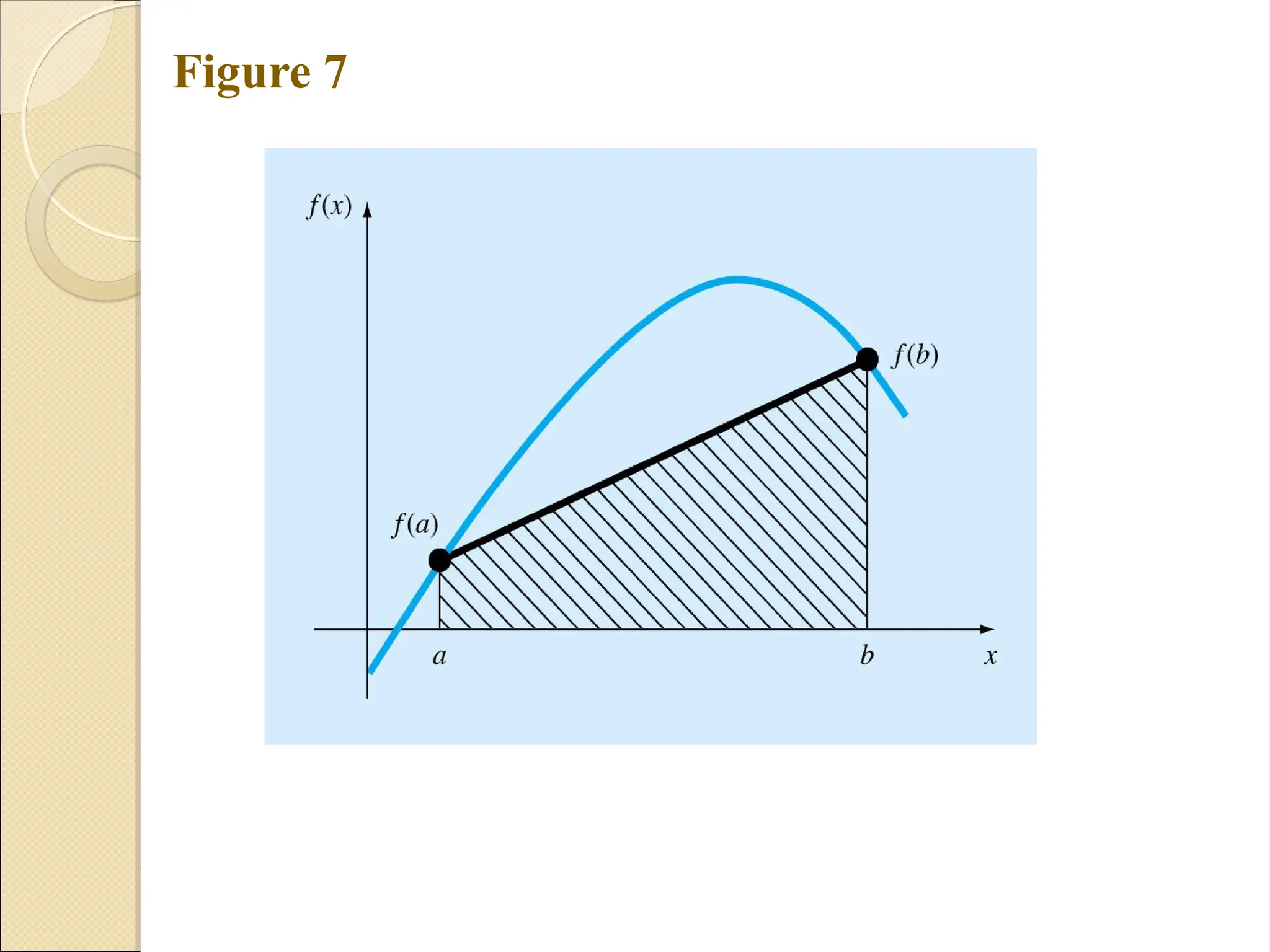
The McGraw-Hill Companies, Inc. Permission required for reproduction or display. The Trapezoidal Rule The Trapezoidal Rule The Trapezoidal rule is the first of the Newton- Cotes closed integration formulas, corresponding to the case where the polynomial is first order: The area under this first order polynomial is an estimate of the integral of f(x) between the limits of a and b: b a b a dx x f dx x f I ) ( ) ( 1 2 ) ( ) ( ) ( b f a f a b I Trapezoidal rule
12.
Copyright © 2006
The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Figure 7
13.
Copyright © 2006
The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Error of the Trapezoidal Rule When we employ the integral under a straight line segment to approximate the integral under a curve, error may be substantial: where lies somewhere in the interval from a to b. 3 ) )( ( 12 1 a b f Et
14.
Copyright © 2006
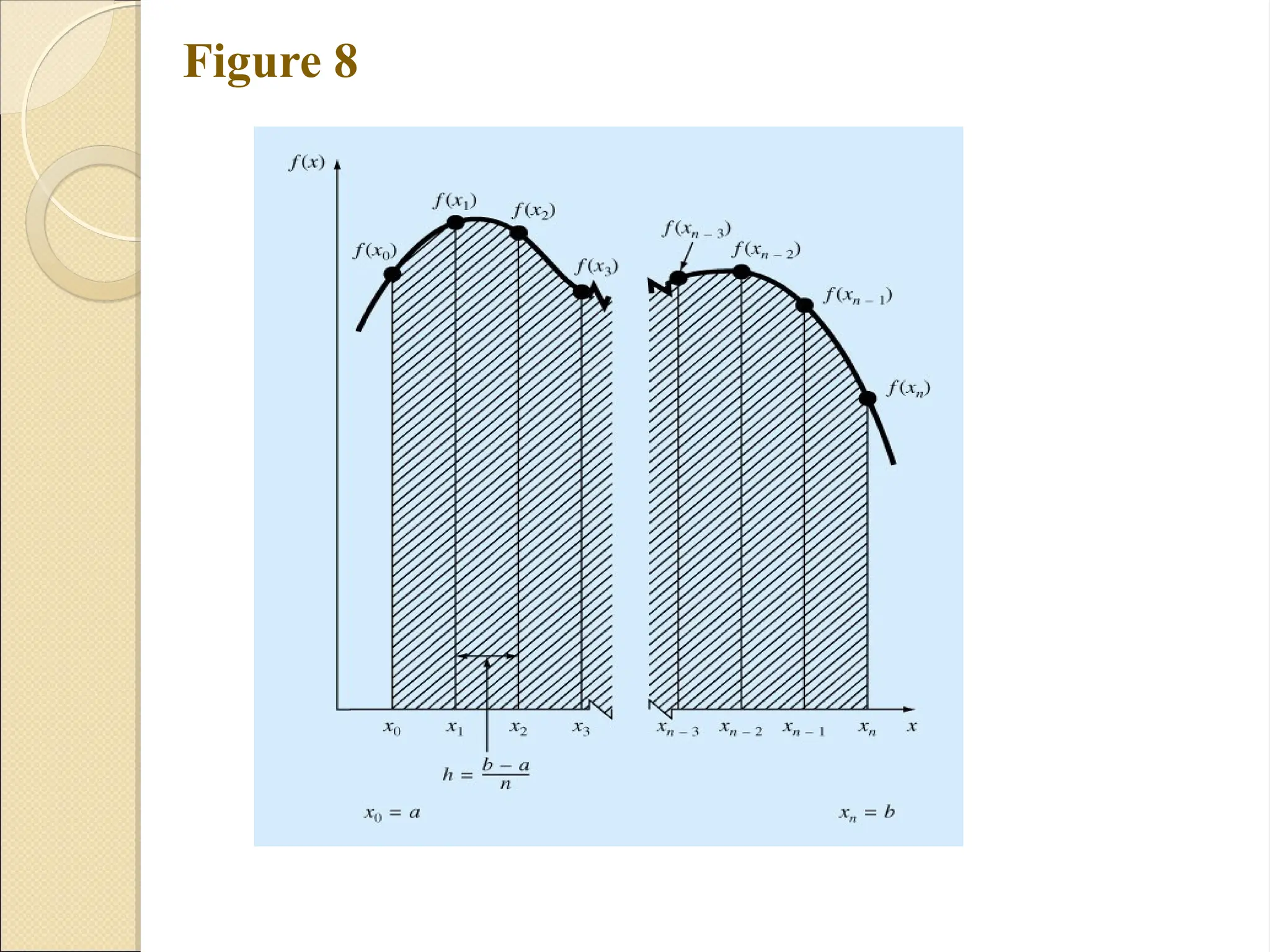
The McGraw-Hill Companies, Inc. Permission required for reproduction or display. The Multiple Application Trapezoidal Rule One way to improve the accuracy of the trapezoidal rule is to divide the integration interval from a to b into a number of segments and apply the method to each segment. The areas of individual segments can then be added to yield the integral for the entire interval. Substituting the trapezoidal rule for each integral yields: n n x x x x x x n dx x f dx x f dx x f I x b x a n a b h 1 2 1 1 0 ) ( ) ( ) ( 0 2 ) ( ) ( 2 ) ( ) ( 2 ) ( ) ( 1 2 1 1 0 n n x f x f h x f x f h x f x f h I
15.
Copyright © 2006
The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Figure 8
16.
Copyright © 2006
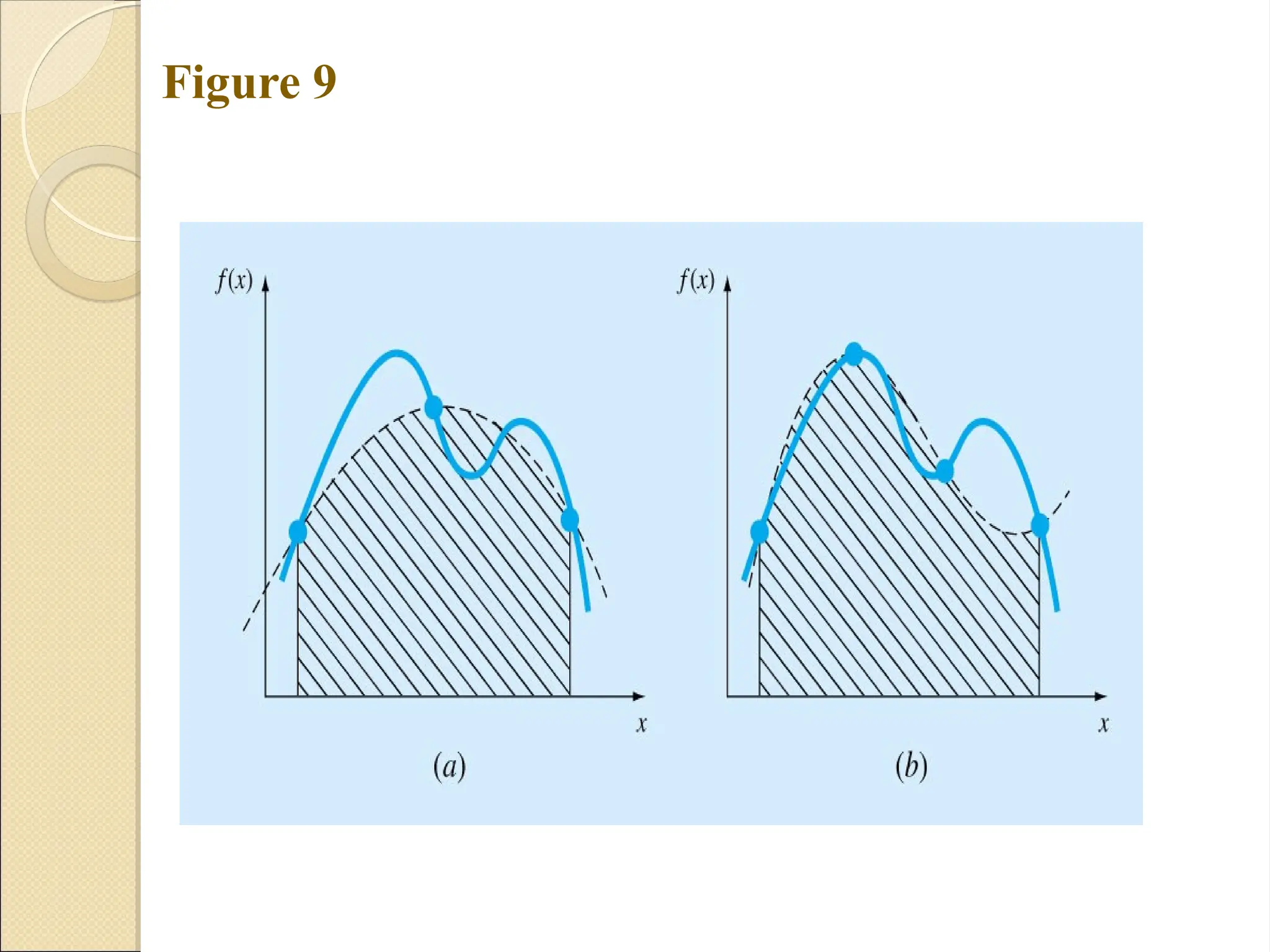
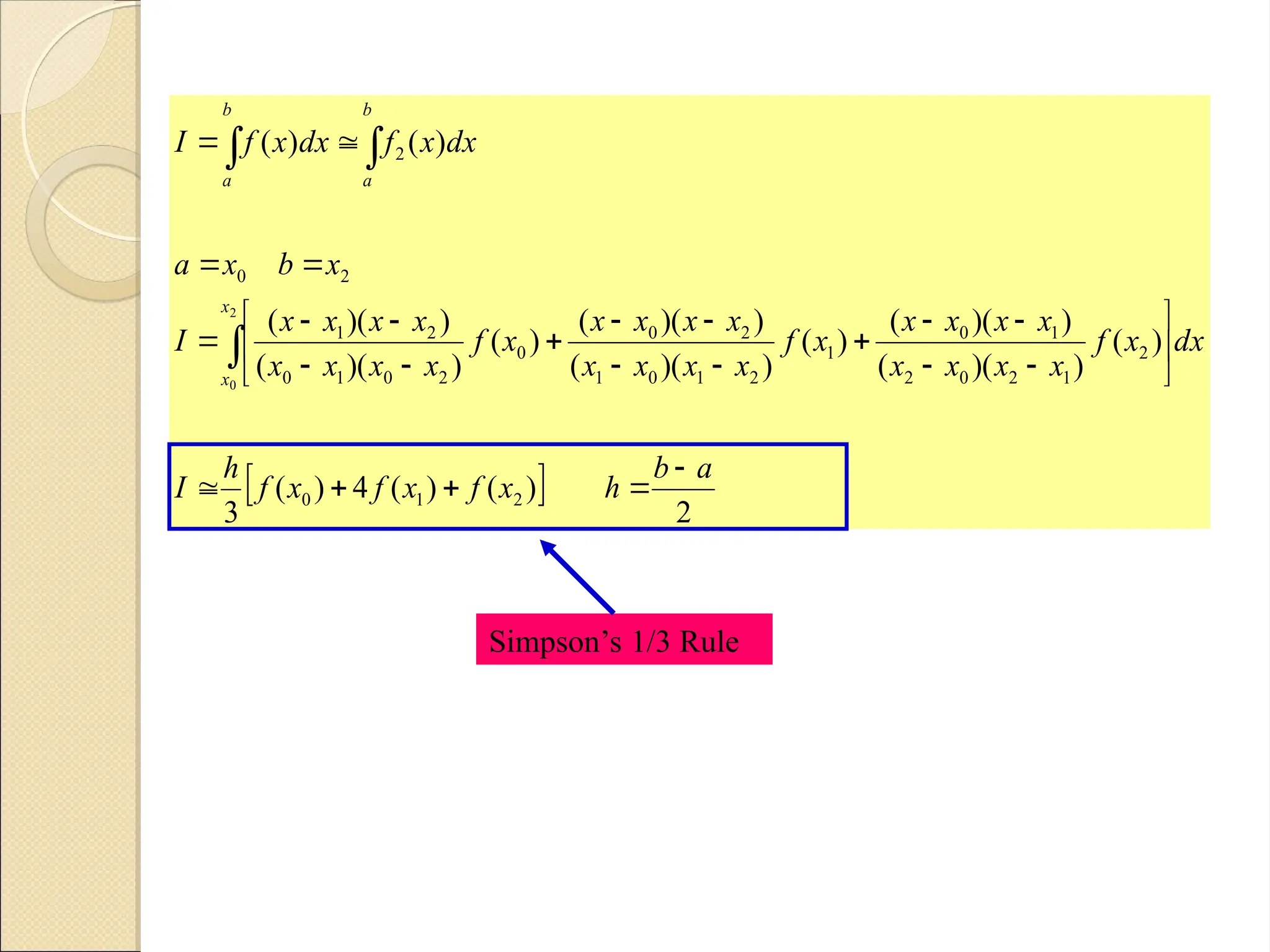
The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Simpson’s Rules Simpson’s Rules More accurate estimate of an integral is obtained if a high-order polynomial is used to connect the points. The formulas that result from taking the integrals under such polynomials are called Simpson’s rules. Simpson’s 1/3 Rule Results when a second-order interpolating polynomial is used.
17.
Copyright © 2006
The McGraw-Hill Companies, Inc. Permission required for reproduction or display. Figure 9
18.
Copyright © 2006
The McGraw-Hill Companies, Inc. Permission required for reproduction or display. 2 ) ( ) ( 4 ) ( 3 ) ( ) )( ( ) )( ( ) ( ) )( ( ) )( ( ) ( ) )( ( ) )( ( ) ( ) ( 2 1 0 2 1 2 0 2 1 0 1 2 1 0 1 2 0 0 2 0 1 0 2 1 2 0 2 2 0 a b h x f x f x f h I dx x f x x x x x x x x x f x x x x x x x x x f x x x x x x x x I x b x a dx x f dx x f I x x b a b a Simpson’s 1/3 Rule
Download