Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
Submit search
EN
Uploaded by
Hiroshi Fukui
PPTX, PDF
1,943 views
2016/4/16 名古屋CVPRML 発表資料
2016/4/16に名古屋CVPRMLで発表するスライドです.(内容は修論と同様)
Engineering
◦
Read more
3
Save
Share
Embed
Embed presentation
Download
Downloaded 16 times
1
/ 30
2
/ 30
3
/ 30
4
/ 30
5
/ 30
6
/ 30
7
/ 30
8
/ 30
9
/ 30
10
/ 30
11
/ 30
12
/ 30
13
/ 30
14
/ 30
15
/ 30
16
/ 30
17
/ 30
18
/ 30
19
/ 30
20
/ 30
21
/ 30
22
/ 30
23
/ 30
24
/ 30
25
/ 30
26
/ 30
27
/ 30
28
/ 30
29
/ 30
30
/ 30
More Related Content
PDF
DeepLearningDay2016Spring
by
Takayoshi Yamashita
PDF
DeepLearningDay2016Summer
by
Takayoshi Yamashita
PDF
IEEE ITSS Nagoya Chapter
by
Takayoshi Yamashita
PPTX
[サーベイ論文] Deep Learningを用いた歩行者検出の研究動向
by
Hiroshi Fukui
PDF
20190804_icml_kyoto
by
Takayoshi Yamashita
PDF
MIRU_Preview_JSAI2019
by
Takayoshi Yamashita
PDF
GTC 2016 ディープラーニング最新情報
by
NVIDIA Japan
PDF
【2017.04】cvpaper.challenge 2017
by
cvpaper. challenge
DeepLearningDay2016Spring
by
Takayoshi Yamashita
DeepLearningDay2016Summer
by
Takayoshi Yamashita
IEEE ITSS Nagoya Chapter
by
Takayoshi Yamashita
[サーベイ論文] Deep Learningを用いた歩行者検出の研究動向
by
Hiroshi Fukui
20190804_icml_kyoto
by
Takayoshi Yamashita
MIRU_Preview_JSAI2019
by
Takayoshi Yamashita
GTC 2016 ディープラーニング最新情報
by
NVIDIA Japan
【2017.04】cvpaper.challenge 2017
by
cvpaper. challenge
What's hot
PDF
Deep Learningによる画像認識革命 ー歴史・最新理論から実践応用までー
by
nlab_utokyo
PDF
【2017.06】 cvpaper.challenge 2017
by
cvpaper. challenge
PDF
MIRU2018 tutorial
by
Takayoshi Yamashita
PDF
大規模画像認識とその周辺
by
n_hidekey
PDF
Convolutional Neural Networks のトレンド @WBAFLカジュアルトーク#2
by
Daiki Shimada
PDF
【SSII2015】人を観る技術の先端的研究
by
Hirokatsu Kataoka
PDF
20150414seminar
by
nlab_utokyo
PDF
次世代セキュリティを牽引する画像解析技術の最新動向 - 距離情報を用いた物体認識技術 -
by
Hironobu Fujiyoshi
PDF
【チュートリアル】コンピュータビジョンによる動画認識
by
Hirokatsu Kataoka
PDF
画像認識における幾何学的不変性の扱い
by
Seiji Hotta
PDF
20141008物体検出器
by
Takuya Minagawa
PDF
20150803.山口大学講演
by
Hayaru SHOUNO
PPTX
画像認識と深層学習
by
Yusuke Uchida
PPTX
画像処理AIを用いた異常検知
by
Hideo Terada
PPTX
[DL輪読会]Depth Prediction Without the Sensors: Leveraging Structure for Unsuper...
by
Deep Learning JP
PDF
Deep Learningと画像認識 ~歴史・理論・実践~
by
nlab_utokyo
PDF
20160825 IEICE SIP研究会 講演
by
Hayaru SHOUNO
PDF
NVIDIA Seminar ディープラーニングによる画像認識と応用事例
by
Takayoshi Yamashita
PDF
CVPR2016 reading - 特徴量学習とクロスモーダル転移について
by
Akisato Kimura
PDF
Lab introduction 2014
by
nlab_utokyo
Deep Learningによる画像認識革命 ー歴史・最新理論から実践応用までー
by
nlab_utokyo
【2017.06】 cvpaper.challenge 2017
by
cvpaper. challenge
MIRU2018 tutorial
by
Takayoshi Yamashita
大規模画像認識とその周辺
by
n_hidekey
Convolutional Neural Networks のトレンド @WBAFLカジュアルトーク#2
by
Daiki Shimada
【SSII2015】人を観る技術の先端的研究
by
Hirokatsu Kataoka
20150414seminar
by
nlab_utokyo
次世代セキュリティを牽引する画像解析技術の最新動向 - 距離情報を用いた物体認識技術 -
by
Hironobu Fujiyoshi
【チュートリアル】コンピュータビジョンによる動画認識
by
Hirokatsu Kataoka
画像認識における幾何学的不変性の扱い
by
Seiji Hotta
20141008物体検出器
by
Takuya Minagawa
20150803.山口大学講演
by
Hayaru SHOUNO
画像認識と深層学習
by
Yusuke Uchida
画像処理AIを用いた異常検知
by
Hideo Terada
[DL輪読会]Depth Prediction Without the Sensors: Leveraging Structure for Unsuper...
by
Deep Learning JP
Deep Learningと画像認識 ~歴史・理論・実践~
by
nlab_utokyo
20160825 IEICE SIP研究会 講演
by
Hayaru SHOUNO
NVIDIA Seminar ディープラーニングによる画像認識と応用事例
by
Takayoshi Yamashita
CVPR2016 reading - 特徴量学習とクロスモーダル転移について
by
Akisato Kimura
Lab introduction 2014
by
nlab_utokyo
Viewers also liked
PPTX
CVPR2016を自分なりにまとめてみた
by
Hiroshi Fukui
PDF
CVPR 2016 速報
by
Hirokatsu Kataoka
PDF
ECCV 2016 速報
by
Hirokatsu Kataoka
PDF
Problem Based Learning with LEGO Mindstorms
by
Hironobu Fujiyoshi
PDF
Inside-Outカメラからの3次元Scan Pathとシーン構造の復元
by
Hironobu Fujiyoshi
PDF
ICCV2011 report
by
Hironobu Fujiyoshi
PDF
チュートリアルのススメ -チュートリアルのためのチュートリアル-
by
Hironobu Fujiyoshi
PDF
VIEW2013 Binarycode-based Object Recognition
by
Hironobu Fujiyoshi
PDF
統計的学習手法による物体検出の高精度化と効率化 -人検出の実用化に向けて-
by
Hironobu Fujiyoshi
PDF
藤吉研究室10周年記念「これまで10年,ここから10年」
by
Hironobu Fujiyoshi
PDF
Random Forests
by
Hironobu Fujiyoshi
PDF
-SSIIの技術マップ- 過去•現在, そして未来 [領域]認識
by
Hironobu Fujiyoshi
PDF
Fisher Vectorによる画像認識
by
Takao Yamanaka
PDF
ILSVRC2015 手法のメモ
by
Hirokatsu Kataoka
PDF
ROSを核としたロボティクス教育(中部大学ロボット理工学科の紹介)
by
Hironobu Fujiyoshi
PDF
Tutorial for robot programming with LEGO mindstorms EV3
by
Hironobu Fujiyoshi
PDF
統計的学習手法よる人検出
by
Hironobu Fujiyoshi
PDF
いつやるの?Git入門 v1.1.0
by
Masakazu Matsushita
PPTX
[DL輪読会] GAN系の研究まとめ (NIPS2016とICLR2016が中心)
by
Yusuke Iwasawa
PDF
Adversarial Networks の画像生成に迫る @WBAFLカジュアルトーク#3
by
Daiki Shimada
CVPR2016を自分なりにまとめてみた
by
Hiroshi Fukui
CVPR 2016 速報
by
Hirokatsu Kataoka
ECCV 2016 速報
by
Hirokatsu Kataoka
Problem Based Learning with LEGO Mindstorms
by
Hironobu Fujiyoshi
Inside-Outカメラからの3次元Scan Pathとシーン構造の復元
by
Hironobu Fujiyoshi
ICCV2011 report
by
Hironobu Fujiyoshi
チュートリアルのススメ -チュートリアルのためのチュートリアル-
by
Hironobu Fujiyoshi
VIEW2013 Binarycode-based Object Recognition
by
Hironobu Fujiyoshi
統計的学習手法による物体検出の高精度化と効率化 -人検出の実用化に向けて-
by
Hironobu Fujiyoshi
藤吉研究室10周年記念「これまで10年,ここから10年」
by
Hironobu Fujiyoshi
Random Forests
by
Hironobu Fujiyoshi
-SSIIの技術マップ- 過去•現在, そして未来 [領域]認識
by
Hironobu Fujiyoshi
Fisher Vectorによる画像認識
by
Takao Yamanaka
ILSVRC2015 手法のメモ
by
Hirokatsu Kataoka
ROSを核としたロボティクス教育(中部大学ロボット理工学科の紹介)
by
Hironobu Fujiyoshi
Tutorial for robot programming with LEGO mindstorms EV3
by
Hironobu Fujiyoshi
統計的学習手法よる人検出
by
Hironobu Fujiyoshi
いつやるの?Git入門 v1.1.0
by
Masakazu Matsushita
[DL輪読会] GAN系の研究まとめ (NIPS2016とICLR2016が中心)
by
Yusuke Iwasawa
Adversarial Networks の画像生成に迫る @WBAFLカジュアルトーク#3
by
Daiki Shimada
Similar to 2016/4/16 名古屋CVPRML 発表資料
PDF
Tutorial-DeepLearning-PCSJ-IMPS2016
by
Takayoshi Yamashita
PPTX
修士論文
by
harmonylab
PDF
車載カメラの映像から歩行者に関わる危険を予測する技術
by
Takuya Minagawa
PPTX
[DL輪読会]End-to-End Object Detection with Transformers
by
Deep Learning JP
PDF
cvpaper.challenge@CVPR2015(Attribute)
by
cvpaper. challenge
PPTX
サーベイ論文:画像からの歩行者属性認識
by
Yasutomo Kawanishi
PDF
【2015.05】cvpaper.challenge@CVPR2015
by
cvpaper. challenge
PDF
Muramatsu Bachelor Thesis
by
pflab
PDF
NVIDIA Deep Learning SDK を利用した画像認識
by
NVIDIA Japan
PPTX
機械学習を民主化する取り組み
by
Yoshitaka Ushiku
PDF
CVPR 2019 report (30 papers)
by
ShunsukeNakamura17
PDF
アプリケーション展開におけるキーポイント
by
MPRG_Chubu_University
PDF
Efficient Det
by
TakeruEndo
PDF
深層学習 - 画像認識のための深層学習 ①
by
Shohei Miyashita
PPTX
Crowd Counting & Detection論文紹介
by
Plot Hong
PPTX
CNNチュートリアル
by
Ikuro Sato
PPTX
動画像を用いた経路予測手法の分類
by
Tsubasa Hirakawa
PDF
夏のトップカンファレンス論文読み会 / Realtime Multi-Person 2D Pose Estimation using Part Affin...
by
Shunsuke Ono
PPTX
深層学習を用いたバス乗客画像の属性推定 に関する研究
by
harmonylab
PDF
object detection with lidar-camera fusion: survey (updated)
by
Takuya Minagawa
Tutorial-DeepLearning-PCSJ-IMPS2016
by
Takayoshi Yamashita
修士論文
by
harmonylab
車載カメラの映像から歩行者に関わる危険を予測する技術
by
Takuya Minagawa
[DL輪読会]End-to-End Object Detection with Transformers
by
Deep Learning JP
cvpaper.challenge@CVPR2015(Attribute)
by
cvpaper. challenge
サーベイ論文:画像からの歩行者属性認識
by
Yasutomo Kawanishi
【2015.05】cvpaper.challenge@CVPR2015
by
cvpaper. challenge
Muramatsu Bachelor Thesis
by
pflab
NVIDIA Deep Learning SDK を利用した画像認識
by
NVIDIA Japan
機械学習を民主化する取り組み
by
Yoshitaka Ushiku
CVPR 2019 report (30 papers)
by
ShunsukeNakamura17
アプリケーション展開におけるキーポイント
by
MPRG_Chubu_University
Efficient Det
by
TakeruEndo
深層学習 - 画像認識のための深層学習 ①
by
Shohei Miyashita
Crowd Counting & Detection論文紹介
by
Plot Hong
CNNチュートリアル
by
Ikuro Sato
動画像を用いた経路予測手法の分類
by
Tsubasa Hirakawa
夏のトップカンファレンス論文読み会 / Realtime Multi-Person 2D Pose Estimation using Part Affin...
by
Shunsuke Ono
深層学習を用いたバス乗客画像の属性推定 に関する研究
by
harmonylab
object detection with lidar-camera fusion: survey (updated)
by
Takuya Minagawa
Recently uploaded
PDF
2025/12/12 AutoDevNinjaピッチ資料 - 大人な男のAuto Dev環境
by
Masahiro Takechi
PDF
ソフトウェアエンジニアがクルマのコアを創る!? モビリティの価値を最大化するソフトウェア開発の最前線【DENSO Tech Night 第一夜】
by
dots.
PDF
音楽アーティスト探索体験に特化した音楽ディスカバリーWebサービス「DigLoop」|Created byヨハク技研
by
yohakugiken
PDF
krsk_aws_re-growth_aws_devops_agent_20251211
by
uedayuki
PPTX
君をむしばむこの力で_最終発表-1-Monthon2025最終発表用資料-.pptx
by
rintakano624
PDF
ソフトとハードの二刀流で実現する先進安全・自動運転のアルゴリズム開発【DENSO Tech Night 第二夜】 ー高精度な画像解析 / AI推論モデル ...
by
dots.
2025/12/12 AutoDevNinjaピッチ資料 - 大人な男のAuto Dev環境
by
Masahiro Takechi
ソフトウェアエンジニアがクルマのコアを創る!? モビリティの価値を最大化するソフトウェア開発の最前線【DENSO Tech Night 第一夜】
by
dots.
音楽アーティスト探索体験に特化した音楽ディスカバリーWebサービス「DigLoop」|Created byヨハク技研
by
yohakugiken
krsk_aws_re-growth_aws_devops_agent_20251211
by
uedayuki
君をむしばむこの力で_最終発表-1-Monthon2025最終発表用資料-.pptx
by
rintakano624
ソフトとハードの二刀流で実現する先進安全・自動運転のアルゴリズム開発【DENSO Tech Night 第二夜】 ー高精度な画像解析 / AI推論モデル ...
by
dots.
2016/4/16 名古屋CVPRML 発表資料
1.
Ensemble Inference Networksによる 歩行者検出の高精度化に関する研究 機械知覚&ロボティクスグループ TP14023
福井 宏
2.
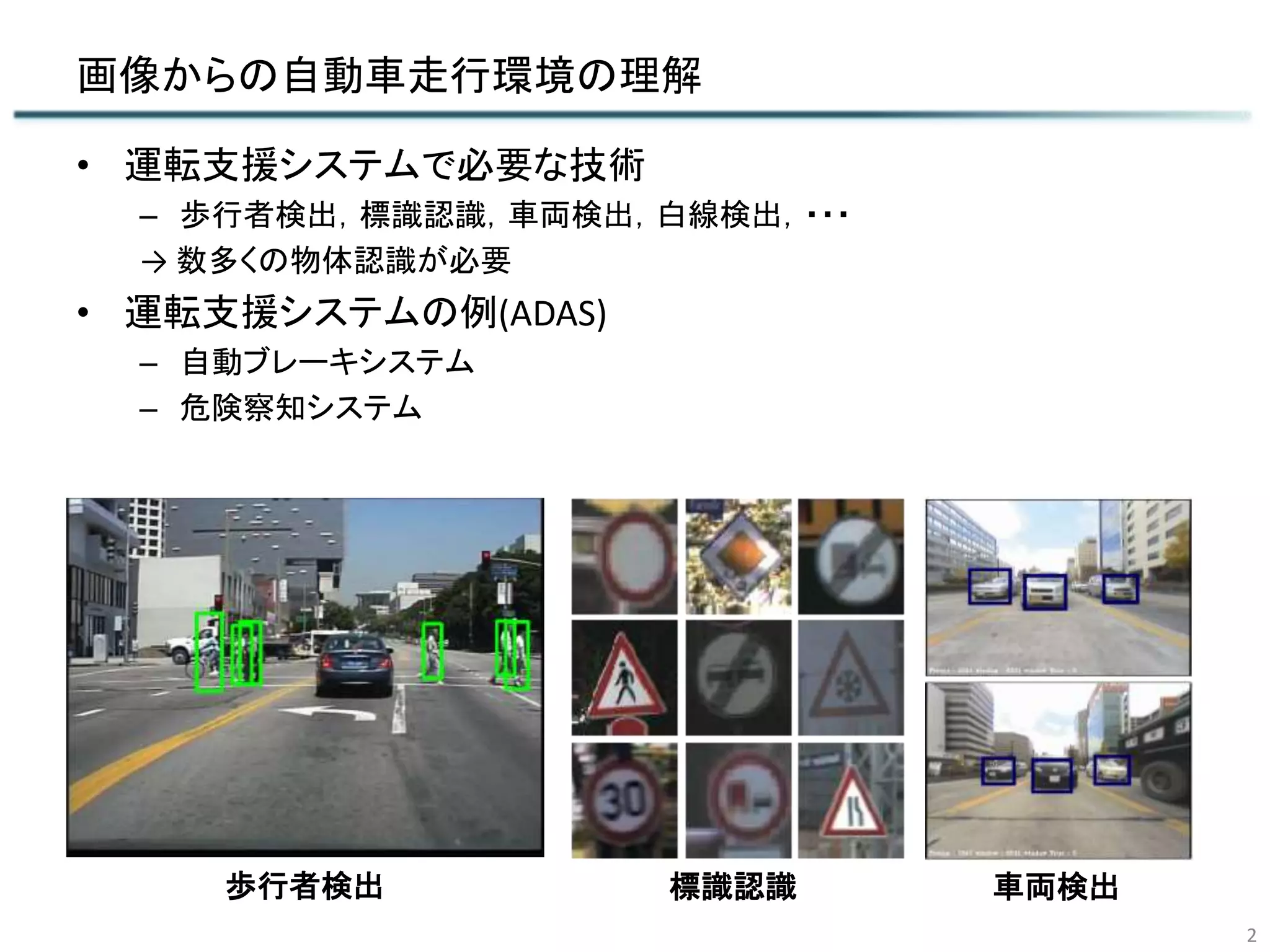
画像からの自動車走行環境の理解 • 運転支援システムで必要な技術 – 歩行者検出,標識認識,車両検出,白線検出,・・・ →
数多くの物体認識が必要 • 運転支援システムの例(ADAS) – 自動ブレーキシステム – 危険察知システム 2 歩行者検出 標識認識 車両検出
3.
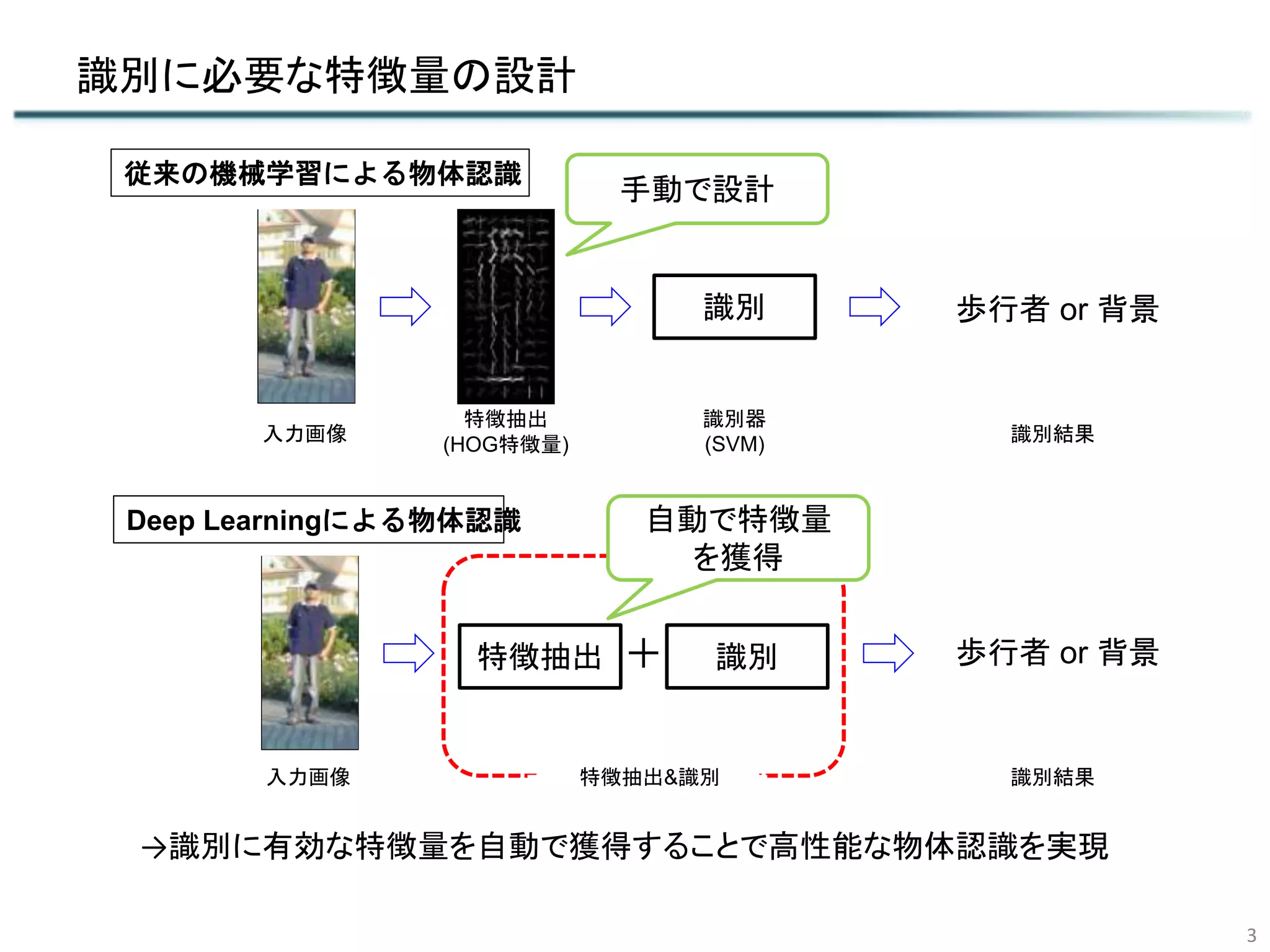
識別に必要な特徴量の設計 →識別に有効な特徴量を自動で獲得することで高性能な物体認識を実現 3 入力画像 識別特徴抽出 特徴抽出&識別 入力画像 特徴抽出 (HOG特徴量) 識別 識別器 (SVM) 従来の機械学習による物体認識 Deep Learningによる物体認識 識別結果 歩行者 or
背景 手動で設計 自動で特徴量 を獲得 識別結果 歩行者 or 背景
4.
Deep Convolutional Neural
Network(CNN) [Y. LeCun, 1989] • 畳み込み層,プーリング層,全結合層から構成されるニューラル ネットワーク – 畳み込みとプーリングにより幾何学的変化に対する不変性の獲得 – 一般物体認識や歩行者検出において高い認識性能を達成 4
5.
CNNによる歩行者検出の従来法 5 • Switchable Deep
Network(SDN)による歩行者検出 [P.Luo, 2014] – 各パーツ領域から特徴マップを生成することで高精度な歩行者検出を実現 – Caltech Pedestrian Detection Benchmarkで高い性能を実現
6.
CNNによる歩行者検出の従来法 6 • Switchable Deep
Network(SDN)による歩行者検出 [P.Luo, 2014] – 各パーツ領域から特徴マップを生成することで高精度な歩行者検出を実現 – Caltech Pedestrian Detection Benchmarkで高い性能を実現 歩行者の全身とパーツを捉える特徴マップを生成
7.
CNNによる歩行者検出の従来法 7 • Switchable Deep
Network(SDN)による歩行者検出 [P.Luo, 2014] – 各パーツ領域から特徴マップを生成することで高精度な歩行者検出を実現 – Caltech Pedestrian Detection Benchmarkで高い性能を実現 歩行者の全身とパーツを捉える特徴マップを生成 検出に有効な歩行者のパーツを選択する際に Restricted Boltzmann Machineを併用
8.
CNNによる歩行者検出の研究事例 8 • Switchable Deep
Network(SDN)による歩行者検出 [P.Luo, 2014] – 各パーツ領域から特徴マップを生成することで高精度な歩行者検出を実現 – Caltech Pedestrian Detection Benchmarkで高い性能を実現 歩行者の全身とパーツを捉える特徴マップを生成 検出に有効な歩行者のパーツを選択する際に Restricted Boltzmann Machineを併用 ネットワークの構造が複雑になる
9.
研究目的 • 構造が複雑なネットワークの問題点 – 学習と識別に要する時間が増加 •
複数のネットワーク(CNN+RBM)で学習・識別 – 学習と識別に必要なメモリ量の増加 • 複数のネットワーク(CNN+RBM)で学習・識別 • 歩行者の全身とパーツを捉える特徴マップの生成 • シンプルな構造のCNNで高精度な歩行者検出を実現 – CNNの構造をシンプルにすることで処理速度と使用するメモリ量の削減 9
10.
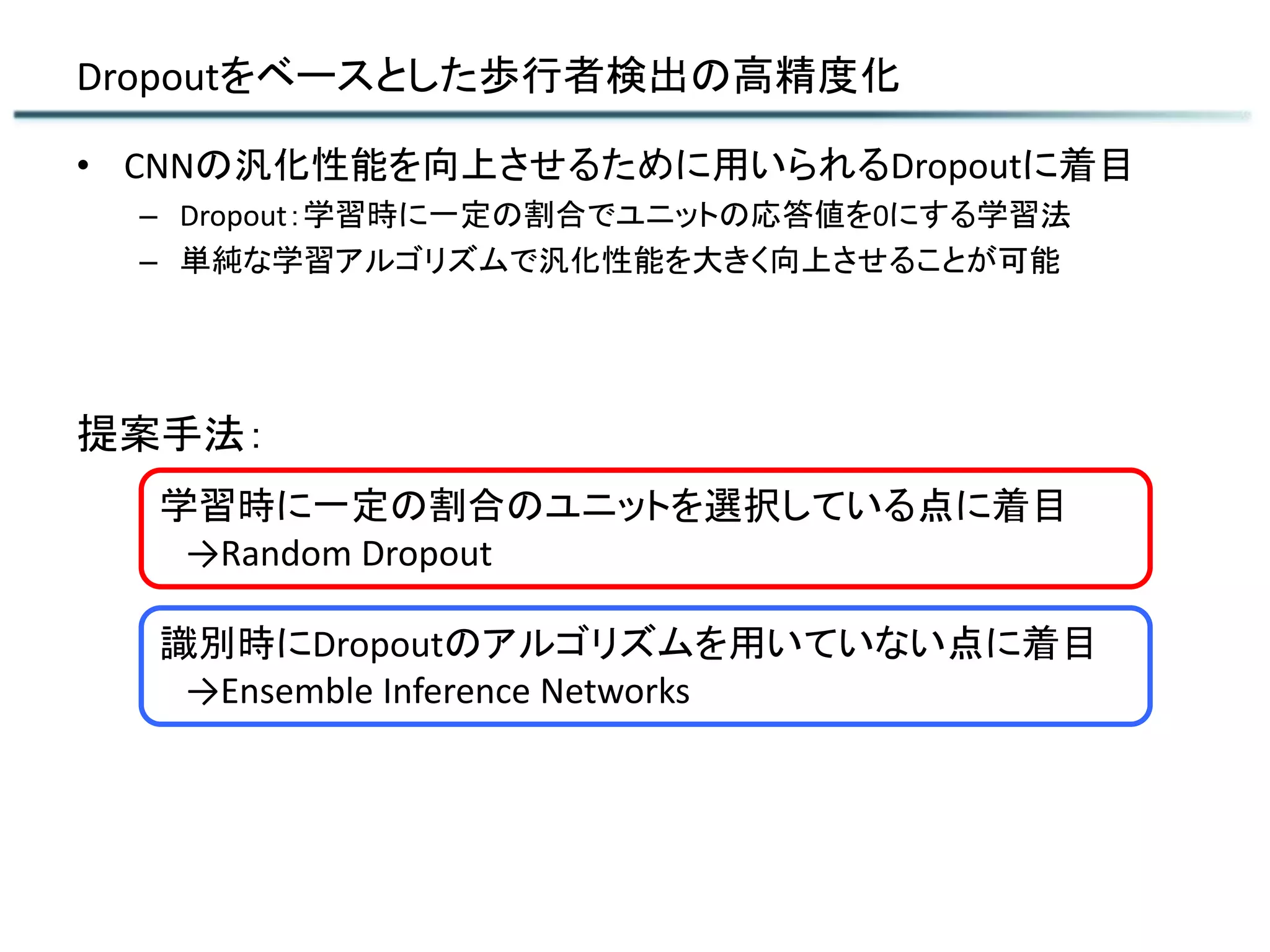
Dropoutをベースとした歩行者検出の高精度化 • CNNの汎化性能を向上させるために用いられるDropoutに着目 – Dropout:学習時に一定の割合でユニットの応答値を0にする学習法 –
単純な学習アルゴリズムで汎化性能を大きく向上させることが可能 学習時に一定の割合のユニットを選択している点に着目 →Random Dropout 識別時にDropoutのアルゴリズムを用いていない点に着目 →Ensemble Inference Networks 提案手法:
11.
Dropout [G.E.Hinton, 2006] •
学習時に一定の割合でユニットの応答値を0にする学習法 – 更新毎に応答値を0にするユニットを変更して学習 11 教師信号 ユニットの削減率 50% 50% 全結合層 出力層 汎化性能が向上する理由 畳み込み層 畳み込み層 プーリング層 プーリング層 Maxout Maxout入力層 構造が異なる複数のネットワークをパラメータが共有した状態で学習
12.
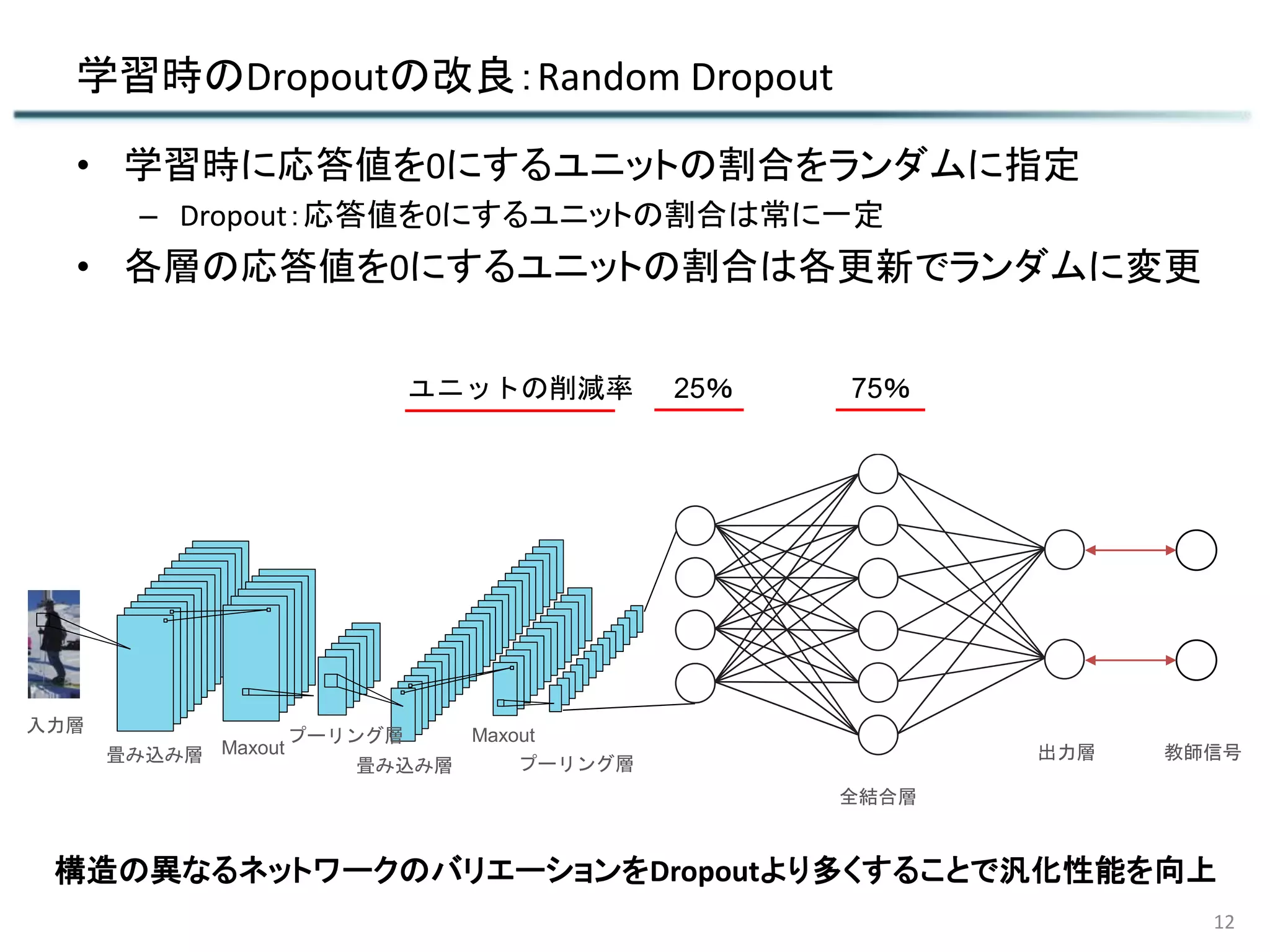
学習時のDropoutの改良:Random Dropout 12 ユニットの削減率 25%
75% 教師信号 全結合層 出力層 構造の異なるネットワークのバリエーションをDropoutより多くすることで汎化性能を向上 • 学習時に応答値を0にするユニットの割合をランダムに指定 – Dropout:応答値を0にするユニットの割合は常に一定 • 各層の応答値を0にするユニットの割合は各更新でランダムに変更 畳み込み層 畳み込み層 プーリング層 プーリング層 Maxout Maxout入力層
13.
Random Dropoutの性能の比較 • 取り除く結合重みの割合により歩行者検出性能が大幅に変動 13 30 40 50 60 70 80 90 100 40
0-40 50 0-50 60 0-60 70 0-70 80 0-80 90 0-90 MissRate(FPPI=0.1)[%] 結合重みを取り除く割合[%] Dropout Drop connect Drop All Random Dropout
14.
Random Dropoutの性能の比較 • 取り除く結合重みの割合により歩行者検出性能が大幅に変動 •
Random Dropoutは取り除く結合重みの範囲が異なっても歩行者 検出性能の変動が少ない – 取り除く結合の割合が0~90%のときMiss rateが39.65%まで減少 14 30 40 50 60 70 80 90 100 40 0-40 50 0-50 60 0-60 70 0-70 80 0-80 90 0-90 MissRate(FPPI=0.1)[%] 結合重みを取り除く割合[%] Dropout Drop connect Drop All Random Dropout
15.
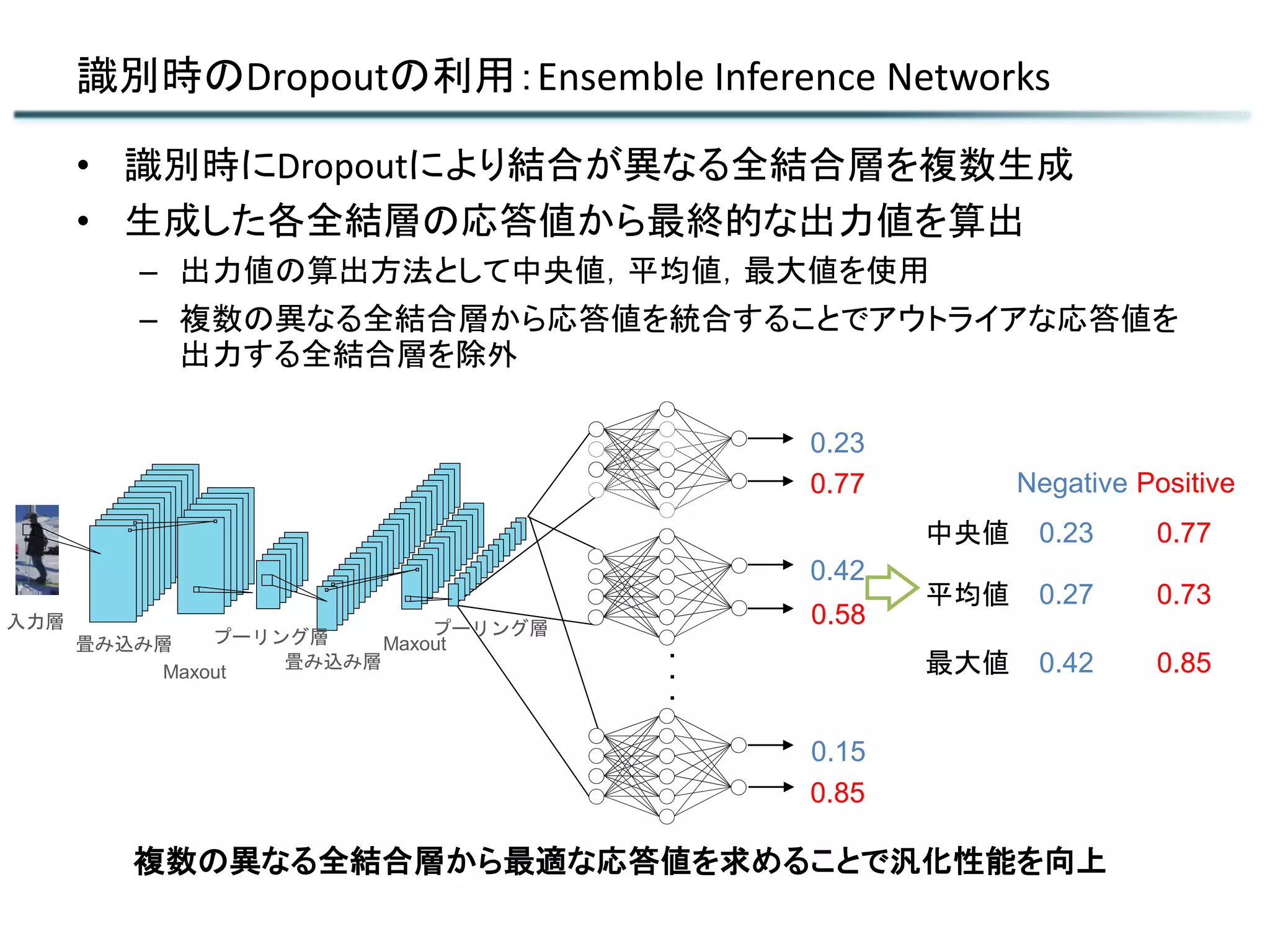
識別時のDropoutの利用:Ensemble Inference Networks •
識別時にDropoutにより結合が異なる全結合層を複数生成 • 生成した各全結層の応答値から最終的な出力値を算出 – 出力値の算出方法として中央値,平均値,最大値を使用 – 複数の異なる全結合層から応答値を統合することでアウトライアな応答値を 出力する全結合層を除外 0.15 0.85 0.23 0.77 0.42 0.58 中央値 PositiveNegative 平均値 最大値 0.770.23 0.730.27 0.850.42・ ・ ・ 複数の異なる全結合層から最適な応答値を求めることで汎化性能を向上 畳み込み層 畳み込み層 プーリング層 プーリング層 Maxout Maxout 入力層
16.
EINの導入による性能の評価 16 Dropout : Random Dropout
: 37.5 38.5 39.5 40.5 1 5 9 13 17 21 25 29 33 Missrate(FPPI=0.1)[%] 全結合層の生成数 中央値 平均値 最大値 中央値 平均値 最大値 • 全結合層の生成数を増加することでMiss rateが減少 – 全結合層の統合に平均値を用いることでMiss rateが約0.98%減少
17.
EINの導入による性能の評価 17 Dropout : Random Dropout
: • 全結合層の生成数を増加することでMiss rateが減少 – 全結合層の統合に平均値を用いることでMiss rateが約0.98%減少 • Random Dropoutを併用することで約1.8%性能が向上 2つの提案手法により従来のCNNより約2.7%のMiss rateが減少 37.5 38.5 39.5 40.5 1 5 9 13 17 21 25 29 33 Missrate(FPPI=0.1)[%] 全結合層の生成数 中央値 平均値 最大値 中央値 平均値 最大値
18.
評価実験 実験1. 従来の歩行者検出法と性能を比較 – 性能の比較にはCaltech
Pedestrian Datasetを使用 実験2. 提案手法を標識認識に応用した際の性能評価 – 性能の比較にはGerman Traffic Sign Recognition Benchmark Datasetを使用 実験3. 計算コストの比較 18
19.
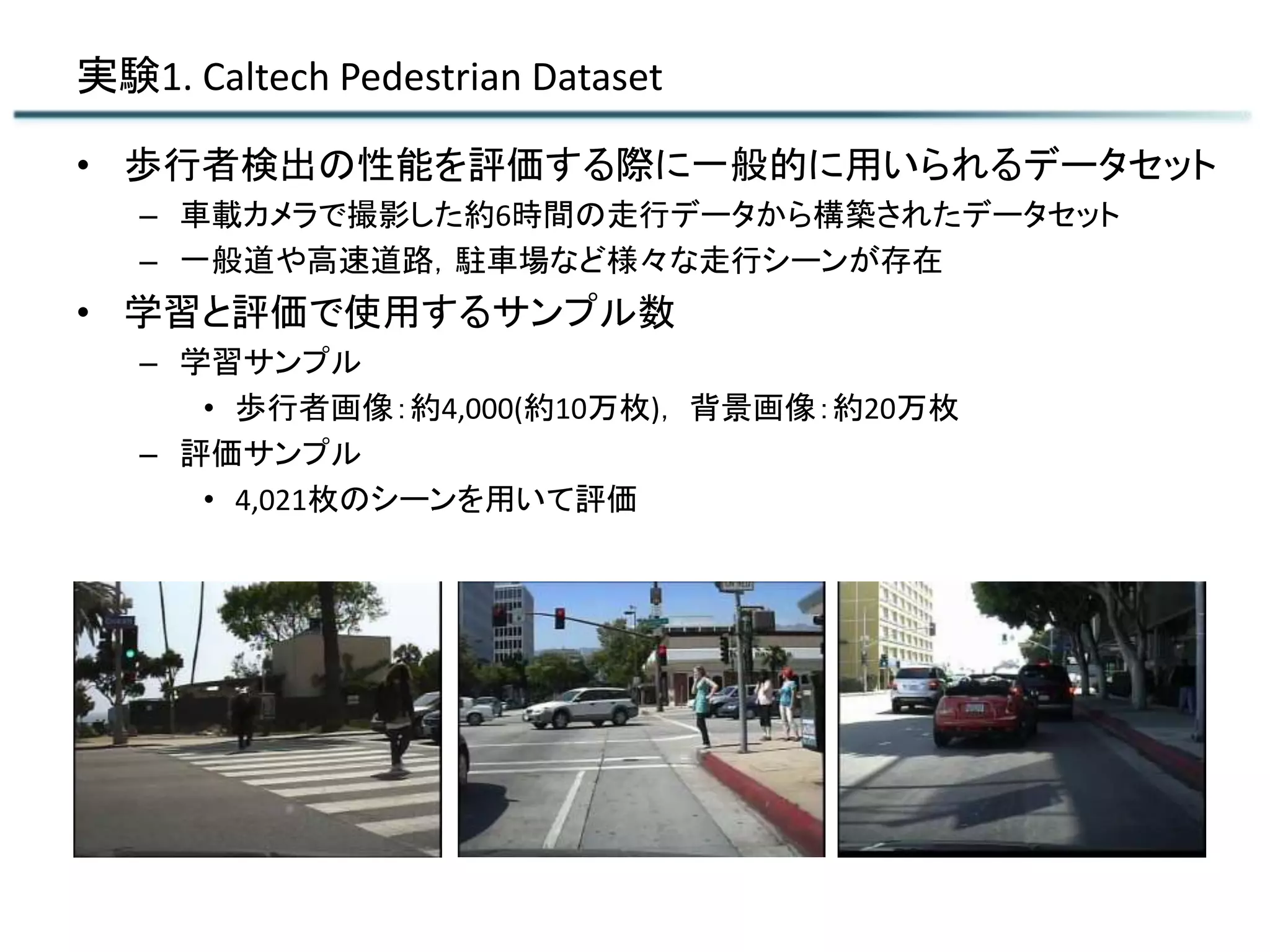
実験1. Caltech Pedestrian
Dataset • 歩行者検出の性能を評価する際に一般的に用いられるデータセット – 車載カメラで撮影した約6時間の走行データから構築されたデータセット – 一般道や高速道路,駐車場など様々な走行シーンが存在 • 学習と評価で使用するサンプル数 – 学習サンプル • 歩行者画像:約4,000(約10万枚), 背景画像:約20万枚 – 評価サンプル • 4,021枚のシーンを用いて評価
20.
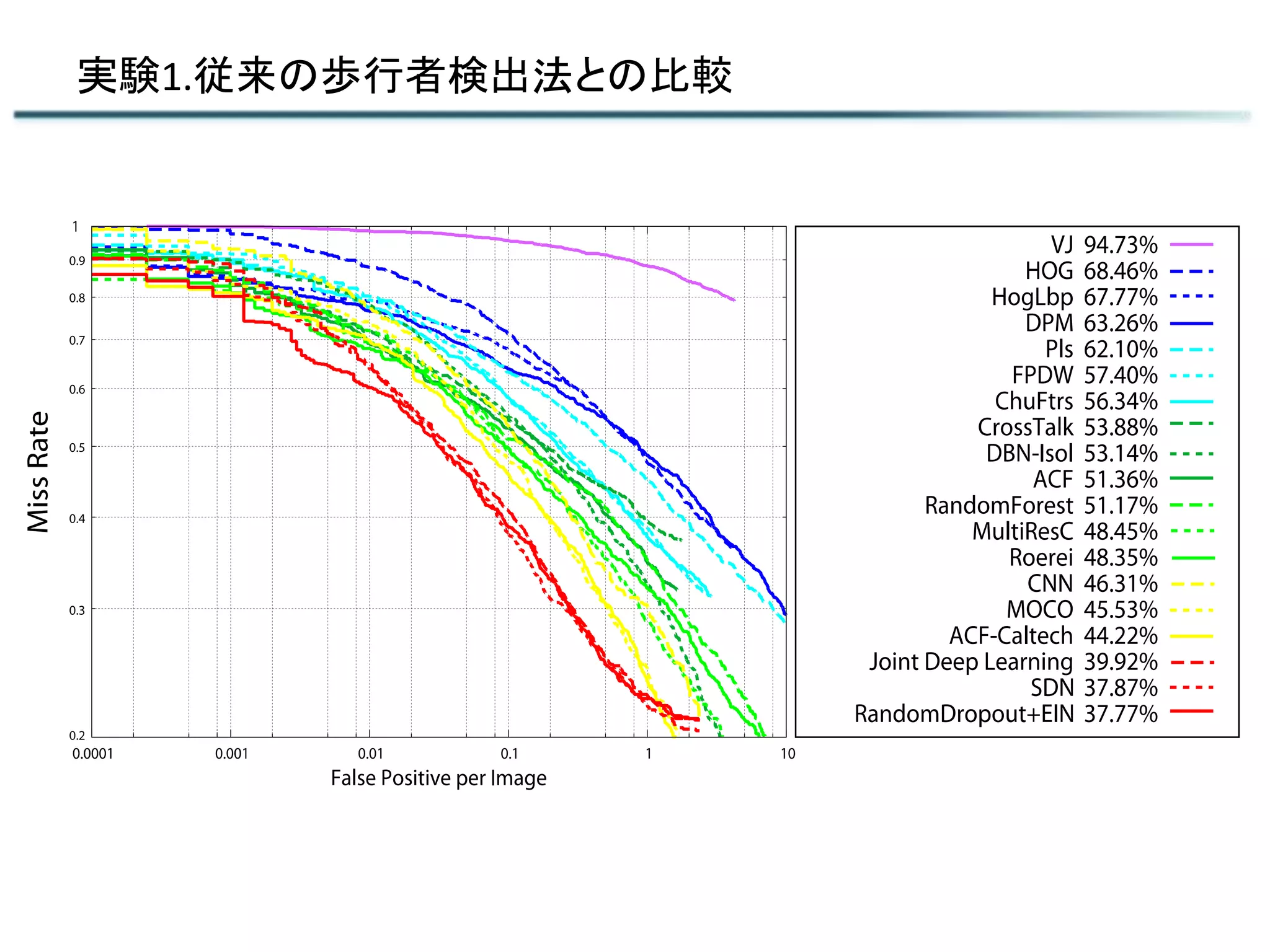
実験1.従来の歩行者検出法との比較
21.
実験1.従来の歩行者検出法との比較 従来の歩行者検出法(HOG,DPM)より検出精度が約25%向 上 SDNと同等の精度で検出可能
22.
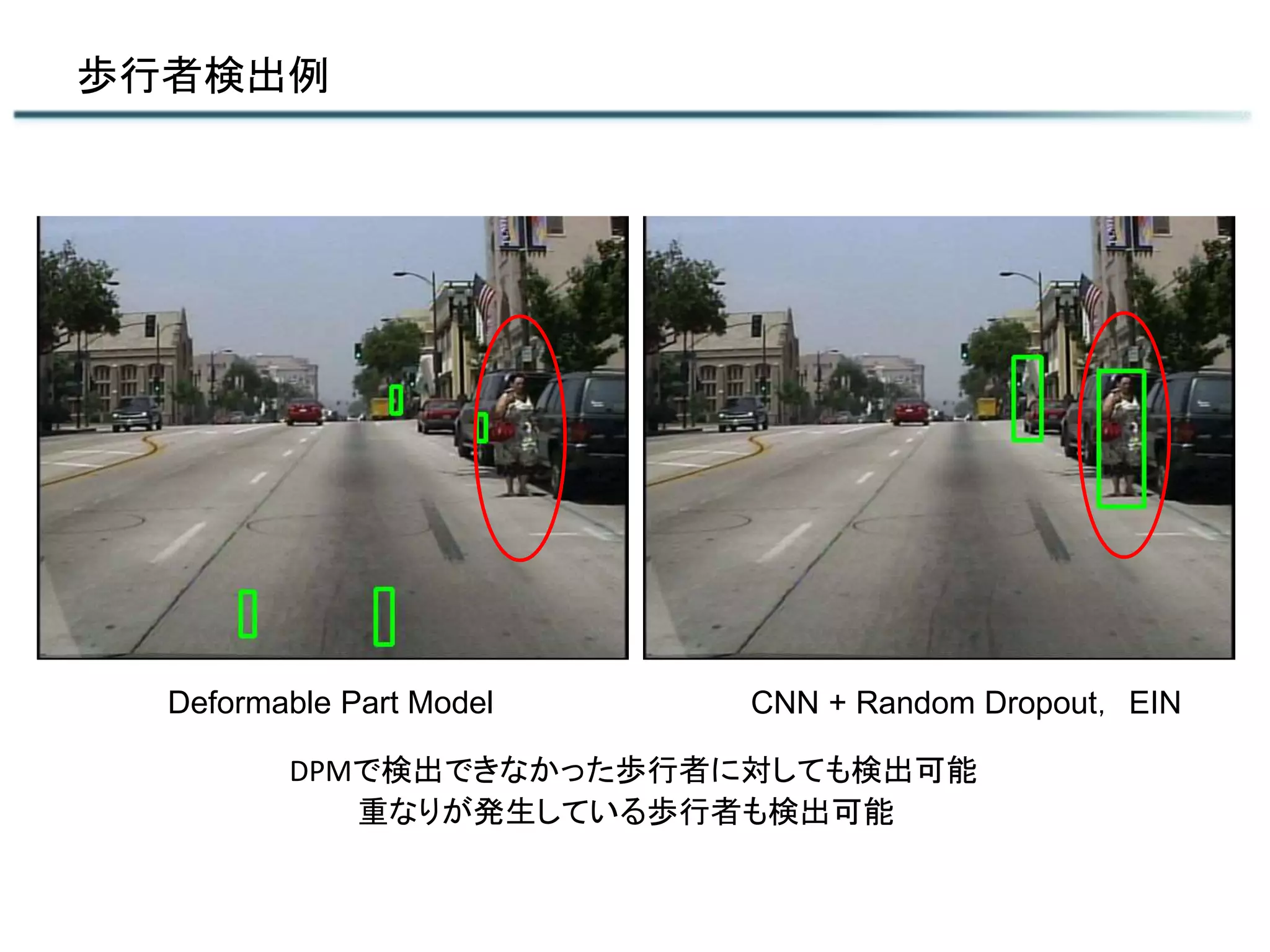
歩行者検出例 Deformable Part Model
CNN + Random Dropout,EIN DPMで検出できなかった歩行者に対しても検出可能 重なりが発生している歩行者も検出可能
23.
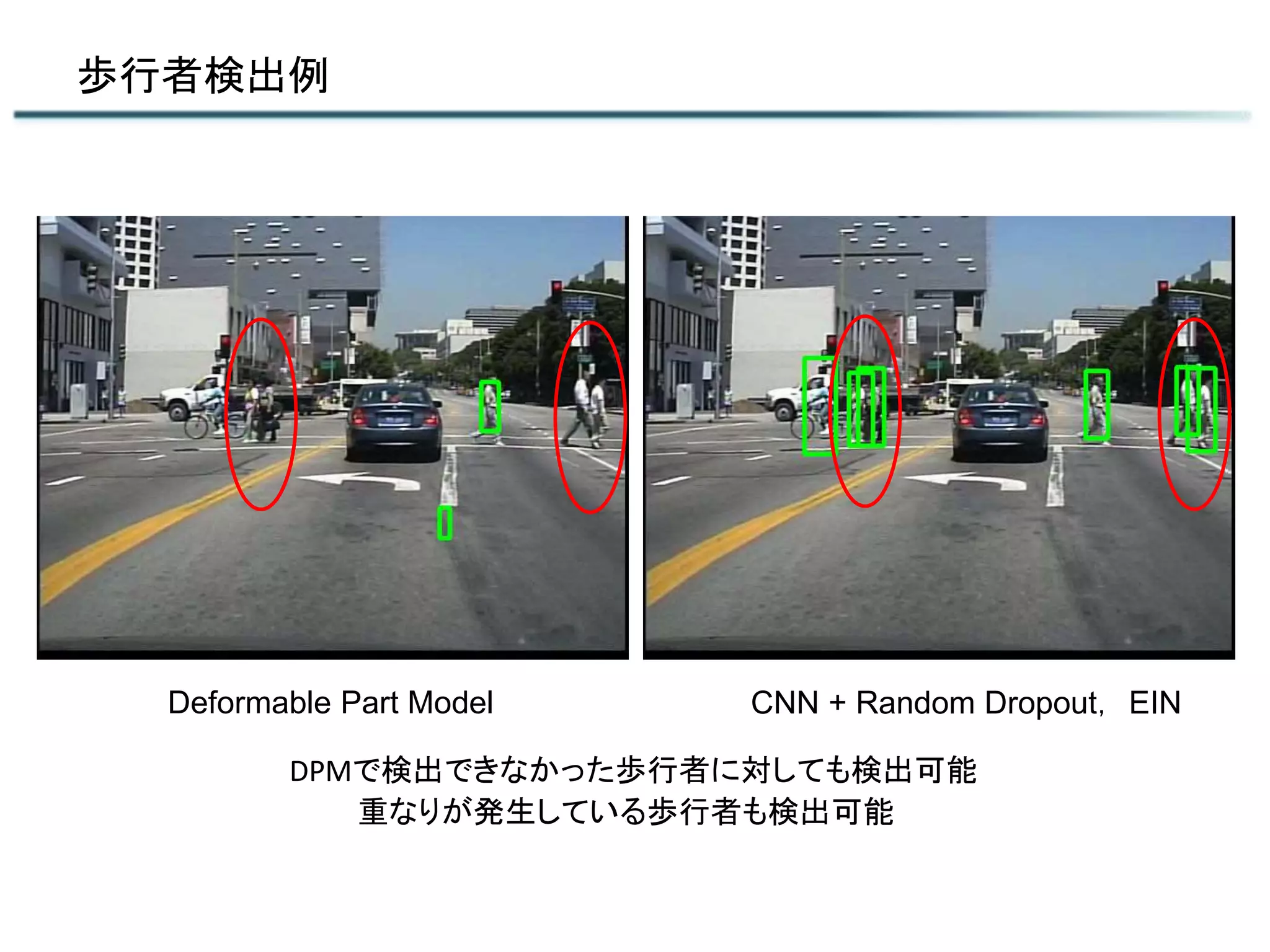
歩行者検出例 DPMで検出できなかった歩行者に対しても検出可能 重なりが発生している歩行者も検出可能 Deformable Part Model
CNN + Random Dropout,EIN
24.
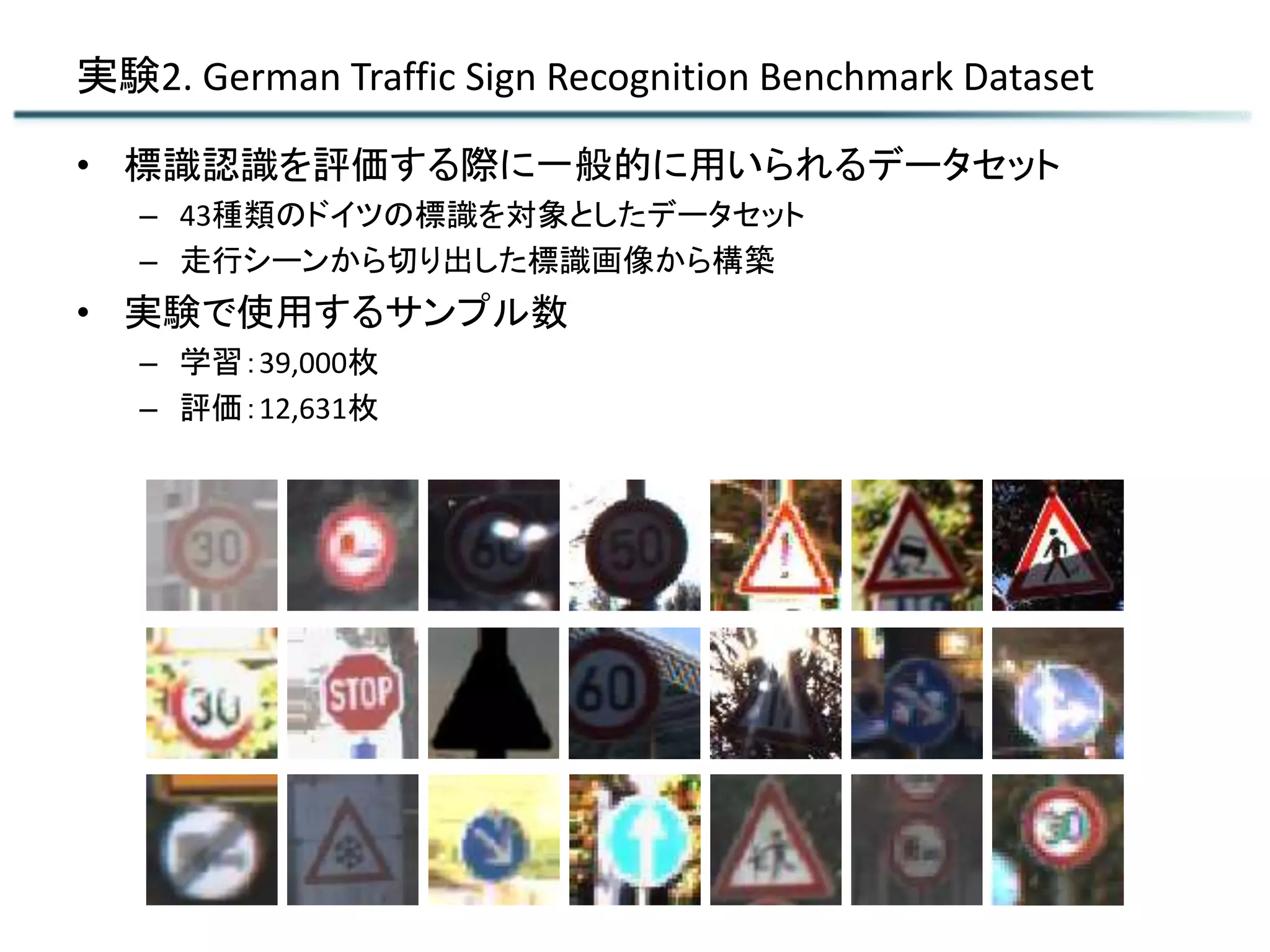
実験2. German Traffic
Sign Recognition Benchmark Dataset • 標識認識を評価する際に一般的に用いられるデータセット – 43種類のドイツの標識を対象としたデータセット – 走行シーンから切り出した標識画像から構築 • 実験で使用するサンプル数 – 学習:39,000枚 – 評価:12,631枚
25.
実験2. 従来の標識認識法との比較 25 手法 認識率[%] Multi-Column
Deep Neural Network 99.46 Random Dropout + EIN 99.23 Human Performance 98.84 Multi-Scale CNN 98.31 CNN 97.97 Random Forest 96.14 LDA on HOG 95.68
26.
実験2. 従来の標識認識法との比較 26 手法 認識率[%] Multi-Column
Deep Neural Network 99.46 Random Dropout + EIN 99.23 Human Performance 98.84 Multi-Scale CNN 98.31 CNN 97.97 Random Forest 96.14 LDA on HOG 95.68 従来のCNNより約1.3%精度が向上
27.
実験2. 従来の標識認識法との比較 27 手法 認識率[%] Multi-Column
Deep Neural Network 99.46 Random Dropout + EIN 99.23 Human Performance 98.84 Multi-Scale CNN 98.31 CNN 97.97 Random Forest 96.14 LDA on HOG 95.68 従来のCNNより約1.3%精度が向上 人の認識性能(Human Performance)を上回る性能を実現
28.
実験2. 標識認識の結果例 入力画像 入力画像
入力画像CNN CNN 提案手法 CNN 提案手法 人が認識困難な標識に対しても高精度に認識が可能 提案手法 人が一目で標識が認識できるサンプル 人でも認識がやや困難なサンプル 人でも認識が困難なサンプル
29.
実験3. 計算コストの比較 29 SDNの約38%のユニット数で同等の性能を実現 手法 ネットワークの構造
ユニット数 CNN Conv(40×9×5, 64×5×3, 32×3×3) Full(1000, 500, 100, 2) 226,002 Random Dropout + EIN Conv(40×9×5, 64×5×3, 32×3×3) Full(1000, 500, 100, 2) × 33 232,402 SDN Conv(64×9×9) Full(2100) Switchable層 Full(2000, 2) 604,402 提案手法のネットワークの規模は従来のCNNとほぼ同等のユニット数 +2.8% -61.5%
30.
まとめ 30 • Random DropoutとEINによる歩行者検出と標識認識の高精度化 –
構造の異なるネットワークのバリエーションを増やすことで汎化性能を向上 – 複数の異なる全結合層から最適な識別結果を出力することで汎化性能を向上 – 歩行者検出において約2.8%,標識認識において約1.3%の認識精度が向上 • 歩行者検出:Random Dropout 約0.8%,EIN 約1.9% • 標識認識 : Random Dropout 約0.52%,EIN 約0.05% – 従来法であるSDNの約38%のユニット数で同等の性能 • 今後の予定 – 歩行者属性情報を用いた歩行者検出の高精度化
Editor's Notes
#2
Deep Convolutional Neural Networkを用いた歩行者と自動車走行環境の理解 と題しまして 中部大学 福井宏 が発表します.
#3
車載カメラから得られたフレームを用いて,自動車の走行環境を理解するには数多くの物体認識をする必要があります. 例として,歩行者や標識,車両,白線などがあります. これらの物体認識技術は,自動ブレーキシステムや危険察知システムなどに応用されています.
#4
しかし,従来の機械学習によるアプローチは,特徴量の設計の段階で あらかじめ色に着億するか勾配に着目するかなど決める必要があります.
#5
画像認識の分野において,最も用いられているDeep Convolutional Neural Networkは,畳み込み層とプーリング層,全結合層から構成されるニューラルネットワークです. CNNは,畳み込みとプーリングを繰り返し行うことで,幾何学的変化に対する不変性を獲得しています. CNNのモデルは,HubelとWieselの単純細胞と複雑細胞をモデルとしており, 畳み込み層が特定の傾きに反応する単純細胞を表現し,プーリング層がその傾きが移動しても反応する複雑細胞を表現しています.
#6
歩行者検出において,CNNをベースとした手法の例として,Switchable Deep Networkがあります. SDNは,生成される特徴マップをSpatial poolingにより分割し,歩行者検出に有効な特徴マップを選択することで高性能な歩行者検出を実現しています. SDNは,歩行者検出のベンチマークであるCaltech Pedestrian Datasetにおいてトップとなっています. しかし,SDNは歩行者検出の性能は高いのですが,構造が複雑となっており,計算コストが高いデメリットがあります.
#7
歩行者検出において,CNNをベースとした手法の例として,Switchable Deep Networkがあります. SDNは,生成される特徴マップをSpatial poolingにより分割し,歩行者検出に有効な特徴マップを選択することで高性能な歩行者検出を実現しています. SDNは,歩行者検出のベンチマークであるCaltech Pedestrian Datasetにおいてトップとなっています. しかし,SDNは歩行者検出の性能は高いのですが,構造が複雑となっており,計算コストが高いデメリットがあります.
#8
歩行者検出において,CNNをベースとした手法の例として,Switchable Deep Networkがあります. SDNは,生成される特徴マップをSpatial poolingにより分割し,歩行者検出に有効な特徴マップを選択することで高性能な歩行者検出を実現しています. SDNは,歩行者検出のベンチマークであるCaltech Pedestrian Datasetにおいてトップとなっています. しかし,SDNは歩行者検出の性能は高いのですが,構造が複雑となっており,計算コストが高いデメリットがあります.
#9
歩行者検出において,CNNをベースとした手法の例として,Switchable Deep Networkがあります. SDNは,生成される特徴マップをSpatial poolingにより分割し,歩行者検出に有効な特徴マップを選択することで高性能な歩行者検出を実現しています. SDNは,歩行者検出のベンチマークであるCaltech Pedestrian Datasetにおいてトップとなっています. しかし,SDNは歩行者検出の性能は高いのですが,構造が複雑となっており,計算コストが高いデメリットがあります.
#12
提案手法であるRandom DropoutとEINのベースとなるDropoutは,汎化性能を向上させるための代表的な学習法であり, 単純なアルゴリズムであるにも関わらず汎化性能を高く向上させることができます. Dropoutは,学習時に一定の割合でユニットの応答値を0にする学習法で,ユニットの応答値を0にすることで, 応答値を0にしたユニットに繋がる結合重みが取り除かれます.
#13
学習処理で用いる提案手法の”Random Dropout”では,Dropoutが一定の割合のユニットを選択して応答値を0にしている部分に着目しています. Random Dropoutでは,各更新処理と各層の応答値を0にするユニットの割合をランダムに指定します. Random Dropoutは,各更新処理で結合が異なるCNNのバリエーションを,Dropoutより多く持たせることでDropoutより汎化性能を向上させています.
#16
識別処理で用いる提案手法のEnsemble Inference Networksについて説明します. 従来のDropoutは,学習処理のみ使用されています. EINは,識別処理においてDropoutを導入した手法です. EINのアルゴリズムは,まずDropoutにより結合重みを取り除いた全結合層のネットワークを構築し,得られた特徴マップを入力することで各クラスに対するスコアを出力します. この処理は,構築する全結合層のネットワーク数だけ繰り返し行います. そして,各全結合層ネットワークから得られたスコアをソートし,統合することで最終的なスコアを算出します. この時,得られたスコアの統合方法には中央値や平均値,最大値を使用します. この統合方法は,問題設定ごとに適している統合方法を決めれるように一般化しています. EINは,複数の異なる結合のネットワークからスコアを統合することで,アウトライアな応答値を出力する全結合層ネットワークを除外することが出来ます. このような理由から,EINを用いることで汎化性能を向上することが出来ます.
#21
実験結果です. 評価には,Caltech Pedestrian Datasetを用いており,評価に使用したサンプル数は4021枚です. DETカーブの結果から,HOG特徴量を用いた歩行者検出法であるDPMと比べて約23%Miss Rateが減少していることが確認できます. また,従来のCNNとは約7%Miss rateが減少しています. また,State-of-the-artなCNNを用いた歩行者検出法であるJoint Deep Learningとくらべて同等な精度で検出可能であることが確認できる.
#22
実験結果です. 評価には,Caltech Pedestrian Datasetを用いており,評価に使用したサンプル数は4021枚です. ROCカーブの結果から,HOG特徴量を用いた歩行者検出法であるDPMと比べて約23%Miss Rateが減少していることが確認できます. また,従来のCNNとは約8.5%Miss rateが減少しています. また,Deep Learningで最も性能が良い歩行者検出法であるSDNとくらべて同等な精度で検出可能であることが確認できる.
#23
実際の歩行者検出例です. HOG特徴量を用いた歩行者検出法であるDPMと比べ,検出できなかった歩行者に対して提案手法では検出が可能であることが確認できます. また,誤検出も少なく検出が可能です.
#24
また,歩行者同士の重なりが生じた場合でも正確に検出が可能です.
#31
発表は以上です. 今後は,先ほど紹介をした歩行者属性推定に対して重点的に研究を進める予定です.
Download

![Deep Convolutional Neural Network(CNN) [Y. LeCun, 1989]
• 畳み込み層,プーリング層,全結合層から構成されるニューラル
ネットワーク
– 畳み込みとプーリングにより幾何学的変化に対する不変性の獲得
– 一般物体認識や歩行者検出において高い認識性能を達成
4](https://image.slidesharecdn.com/2015-ver2-160415111603/75/2016-4-16-CVPRML-4-2048.jpg)
![CNNによる歩行者検出の従来法
5
• Switchable Deep Network(SDN)による歩行者検出 [P.Luo, 2014]
– 各パーツ領域から特徴マップを生成することで高精度な歩行者検出を実現
– Caltech Pedestrian Detection Benchmarkで高い性能を実現](https://image.slidesharecdn.com/2015-ver2-160415111603/75/2016-4-16-CVPRML-5-2048.jpg)
![CNNによる歩行者検出の従来法
6
• Switchable Deep Network(SDN)による歩行者検出 [P.Luo, 2014]
– 各パーツ領域から特徴マップを生成することで高精度な歩行者検出を実現
– Caltech Pedestrian Detection Benchmarkで高い性能を実現
歩行者の全身とパーツを捉える特徴マップを生成](https://image.slidesharecdn.com/2015-ver2-160415111603/75/2016-4-16-CVPRML-6-2048.jpg)
![CNNによる歩行者検出の従来法
7
• Switchable Deep Network(SDN)による歩行者検出 [P.Luo, 2014]
– 各パーツ領域から特徴マップを生成することで高精度な歩行者検出を実現
– Caltech Pedestrian Detection Benchmarkで高い性能を実現
歩行者の全身とパーツを捉える特徴マップを生成
検出に有効な歩行者のパーツを選択する際に
Restricted Boltzmann Machineを併用](https://image.slidesharecdn.com/2015-ver2-160415111603/75/2016-4-16-CVPRML-7-2048.jpg)
![CNNによる歩行者検出の研究事例
8
• Switchable Deep Network(SDN)による歩行者検出 [P.Luo, 2014]
– 各パーツ領域から特徴マップを生成することで高精度な歩行者検出を実現
– Caltech Pedestrian Detection Benchmarkで高い性能を実現
歩行者の全身とパーツを捉える特徴マップを生成
検出に有効な歩行者のパーツを選択する際に
Restricted Boltzmann Machineを併用
ネットワークの構造が複雑になる](https://image.slidesharecdn.com/2015-ver2-160415111603/75/2016-4-16-CVPRML-8-2048.jpg)
![Dropout [G.E.Hinton, 2006]
• 学習時に一定の割合でユニットの応答値を0にする学習法
– 更新毎に応答値を0にするユニットを変更して学習
11
教師信号
ユニットの削減率 50% 50%
全結合層
出力層
汎化性能が向上する理由
畳み込み層
畳み込み層
プーリング層
プーリング層
Maxout
Maxout入力層
構造が異なる複数のネットワークをパラメータが共有した状態で学習](https://image.slidesharecdn.com/2015-ver2-160415111603/75/2016-4-16-CVPRML-11-2048.jpg)
![Random Dropoutの性能の比較
• 取り除く結合重みの割合により歩行者検出性能が大幅に変動
13
30
40
50
60
70
80
90
100
40 0-40 50 0-50 60 0-60 70 0-70 80 0-80 90 0-90
MissRate(FPPI=0.1)[%]
結合重みを取り除く割合[%]
Dropout Drop connect Drop All Random Dropout](https://image.slidesharecdn.com/2015-ver2-160415111603/75/2016-4-16-CVPRML-13-2048.jpg)
![Random Dropoutの性能の比較
• 取り除く結合重みの割合により歩行者検出性能が大幅に変動
• Random Dropoutは取り除く結合重みの範囲が異なっても歩行者
検出性能の変動が少ない
– 取り除く結合の割合が0~90%のときMiss rateが39.65%まで減少
14
30
40
50
60
70
80
90
100
40 0-40 50 0-50 60 0-60 70 0-70 80 0-80 90 0-90
MissRate(FPPI=0.1)[%]
結合重みを取り除く割合[%]
Dropout Drop connect Drop All Random Dropout](https://image.slidesharecdn.com/2015-ver2-160415111603/75/2016-4-16-CVPRML-14-2048.jpg)
![EINの導入による性能の評価
16
Dropout :
Random Dropout :
37.5
38.5
39.5
40.5
1 5 9 13 17 21 25 29 33
Missrate(FPPI=0.1)[%]
全結合層の生成数
中央値 平均値 最大値
中央値 平均値 最大値
• 全結合層の生成数を増加することでMiss rateが減少
– 全結合層の統合に平均値を用いることでMiss rateが約0.98%減少](https://image.slidesharecdn.com/2015-ver2-160415111603/75/2016-4-16-CVPRML-16-2048.jpg)
![EINの導入による性能の評価
17
Dropout :
Random Dropout :
• 全結合層の生成数を増加することでMiss rateが減少
– 全結合層の統合に平均値を用いることでMiss rateが約0.98%減少
• Random Dropoutを併用することで約1.8%性能が向上
2つの提案手法により従来のCNNより約2.7%のMiss rateが減少
37.5
38.5
39.5
40.5
1 5 9 13 17 21 25 29 33
Missrate(FPPI=0.1)[%]
全結合層の生成数
中央値 平均値 最大値
中央値 平均値 最大値](https://image.slidesharecdn.com/2015-ver2-160415111603/75/2016-4-16-CVPRML-17-2048.jpg)

![実験2. 従来の標識認識法との比較
25
手法 認識率[%]
Multi-Column Deep Neural Network 99.46
Random Dropout + EIN 99.23
Human Performance 98.84
Multi-Scale CNN 98.31
CNN 97.97
Random Forest 96.14
LDA on HOG 95.68](https://image.slidesharecdn.com/2015-ver2-160415111603/75/2016-4-16-CVPRML-25-2048.jpg)
![実験2. 従来の標識認識法との比較
26
手法 認識率[%]
Multi-Column Deep Neural Network 99.46
Random Dropout + EIN 99.23
Human Performance 98.84
Multi-Scale CNN 98.31
CNN 97.97
Random Forest 96.14
LDA on HOG 95.68
従来のCNNより約1.3%精度が向上](https://image.slidesharecdn.com/2015-ver2-160415111603/75/2016-4-16-CVPRML-26-2048.jpg)
![実験2. 従来の標識認識法との比較
27
手法 認識率[%]
Multi-Column Deep Neural Network 99.46
Random Dropout + EIN 99.23
Human Performance 98.84
Multi-Scale CNN 98.31
CNN 97.97
Random Forest 96.14
LDA on HOG 95.68
従来のCNNより約1.3%精度が向上
人の認識性能(Human Performance)を上回る性能を実現](https://image.slidesharecdn.com/2015-ver2-160415111603/75/2016-4-16-CVPRML-27-2048.jpg)





![[サーベイ論文] Deep Learningを用いた歩行者検出の研究動向](https://cdn.slidesharecdn.com/ss_thumbnails/pedsurvey-161216014456-thumbnail.jpg?width=640&height=640&fit=bounds)


















![[DL輪読会]Depth Prediction Without the Sensors: Leveraging Structure for Unsuper...](https://cdn.slidesharecdn.com/ss_thumbnails/struct2depth0301-190304050917-thumbnail.jpg?width=640&height=640&fit=bounds)
















![-SSIIの技術マップ- 過去•現在, そして未来 [領域]認識](https://cdn.slidesharecdn.com/ss_thumbnails/ssii2014-os-recognition-140612-140611032253-phpapp01-thumbnail.jpg?width=640&height=640&fit=bounds)






![[DL輪読会] GAN系の研究まとめ (NIPS2016とICLR2016が中心)](https://cdn.slidesharecdn.com/ss_thumbnails/dliwasawagansurvey-161220014753-thumbnail.jpg?width=640&height=640&fit=bounds)




![[DL輪読会]End-to-End Object Detection with Transformers](https://cdn.slidesharecdn.com/ss_thumbnails/200529dlseminardetr-200529061512-thumbnail.jpg?width=640&height=640&fit=bounds)





















