Download to read offline






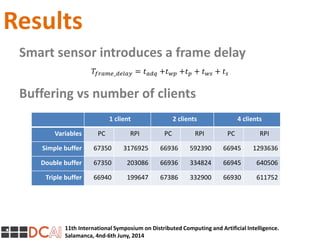


The document discusses performance results of triple buffering built into a Raspberry Pi to optimize distribution of information from smart sensors. Triple buffering allows a frame to always be ready for sending, while double buffering sends the last frame but with some delay. Experiments showed that on an embedded system like the Raspberry Pi, triple buffering had lower delay times than double buffering when distributing sensor data to multiple client processes, though the differences were small. Future work is planned to apply triple buffering to distribute sensor data for parallel robot navigation and mapping processes.