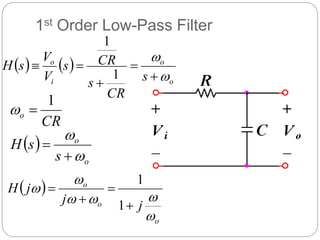
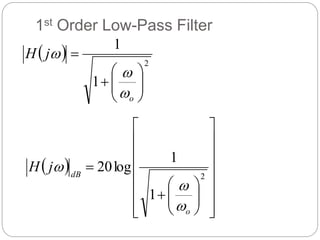
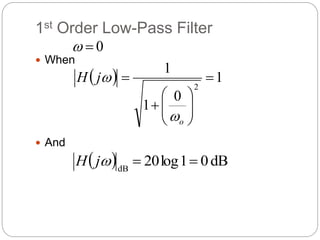
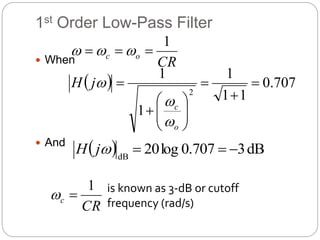
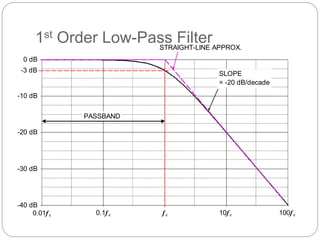
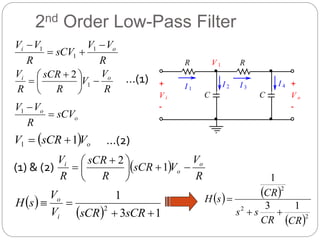
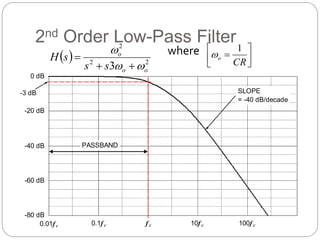
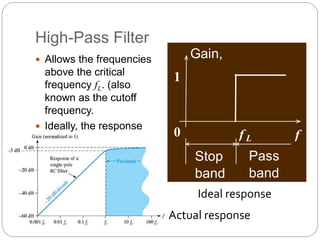
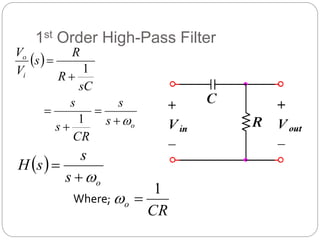
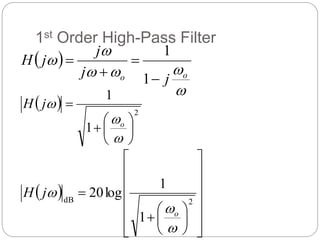
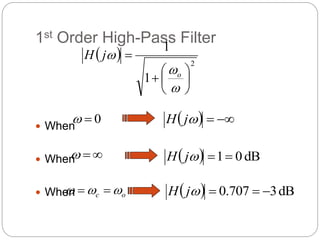
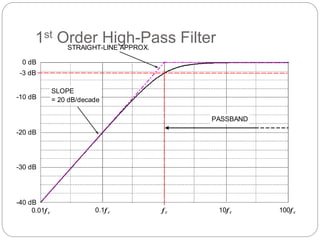
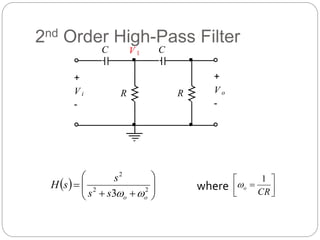
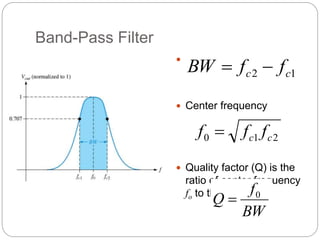
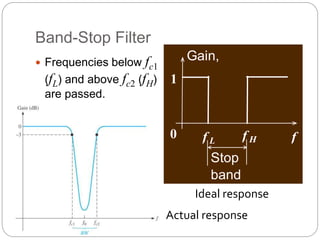
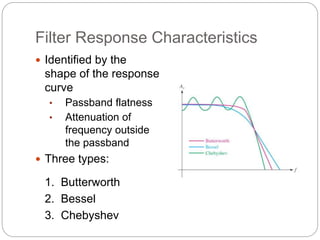
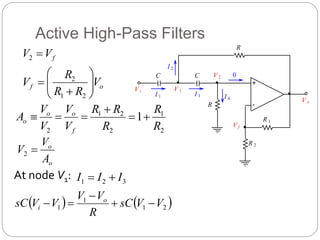
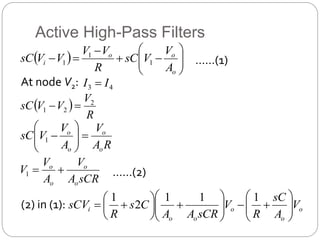
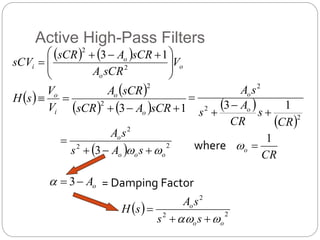
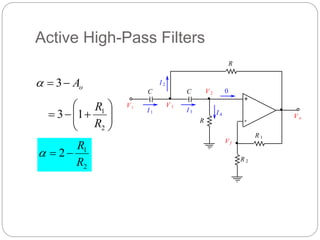
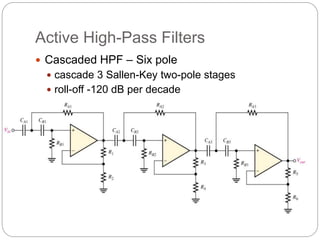
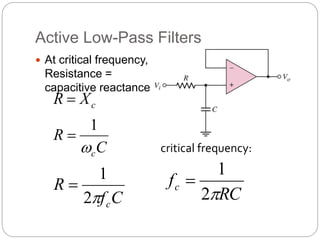
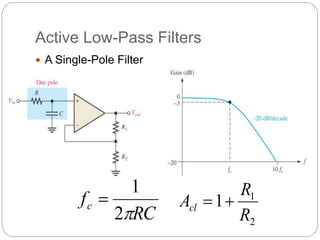
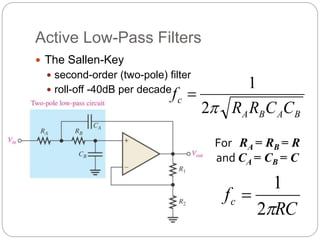
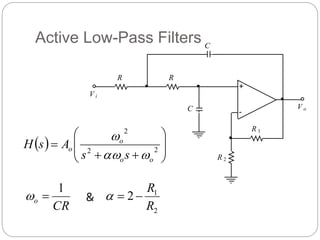
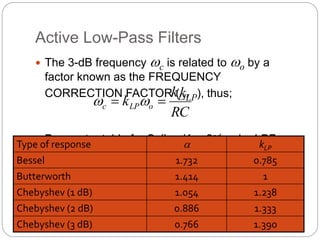
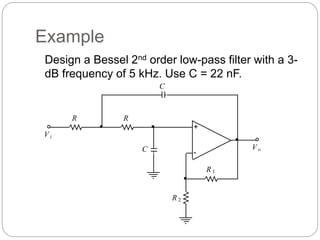
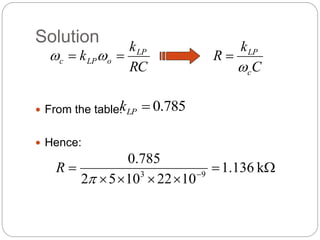
This document outlines different types of active filters including low-pass, high-pass, band-pass, and band-stop filters. It describes the advantages of active filters over passive filters, such as the ability to provide gain and avoid loading problems. The key characteristics of different order filters, such as the 1st and 2nd order low-pass and high-pass filters, are presented. Finally, it discusses filter response characteristics such as Butterworth, Bessel, and Chebyshev responses as well as concepts like critical frequency and roll-off rate.