Downloaded 47 times














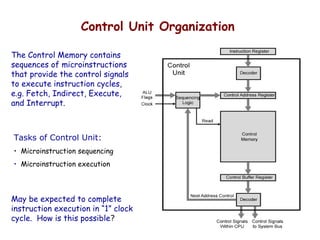



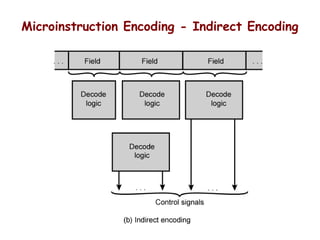




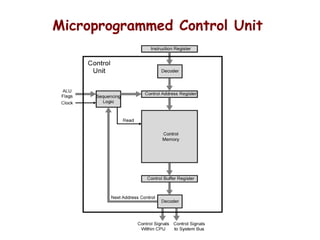

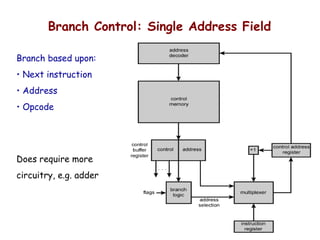
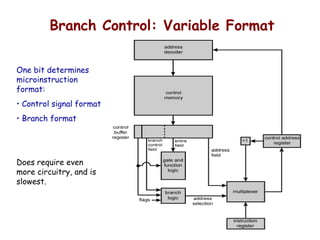


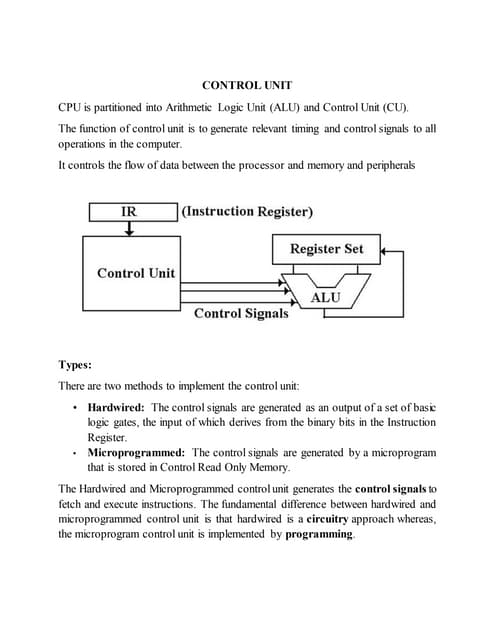
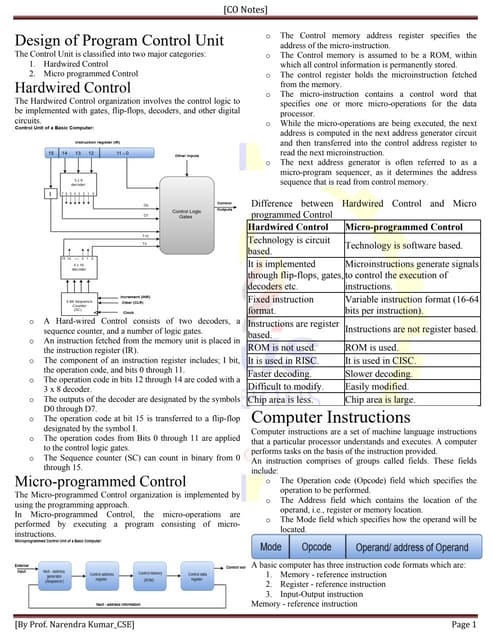
The document discusses microprogrammed control unit implementation in processors. It describes how a control unit can be implemented using microcode stored in control memory. Microinstructions generate control signals and provide branching functionality. There are different approaches to microprogramming like horizontal vs vertical and direct vs indirect encoding. Key factors in the design of microprogrammed control units include speed, size of microinstructions, and address generation for branching.