
Recommended
More Related Content
What's hot
What's hot (20)
Similar to 14 inverse trig functions and linear trig equations-x
Similar to 14 inverse trig functions and linear trig equations-x (20)
More from math260
More from math260 (20)
Recently uploaded
Recently uploaded (20)
14 inverse trig functions and linear trig equations-x
- 1. –π/2 π/2 The Graphs of Inverse Trig–Functions π 0 π/2 –π/2 π 0
- 2. Inverse Functions Start with a calculator demos of sine & sine inverse For the choice of the range.
- 3. A function f(x) = y takes an input x and produces one output y. Inverse Functions
- 4. A function f(x) = y takes an input x and produces one output y. Often we represent a function by the following figure. Inverse Functions domian rangex y=f(x) f
- 5. A function f(x) = y takes an input x and produces one output y. Often we represent a function by the following figure. Inverse Functions We like to reverse the operation, i.e., if we know the output y, what was (were) the input x? domian rangex y=f(x) f
- 6. A function f(x) = y takes an input x and produces one output y. Often we represent a function by the following figure. Inverse Functions We like to reverse the operation, i.e., if we know the output y, what was (were) the input x? This procedure of associating the output y to the input x may or may not be a function. domian rangex y=f(x) f
- 7. A function f(x) = y takes an input x and produces one output y. Often we represent a function by the following figure. Inverse Functions We like to reverse the operation, i.e., if we know the output y, what was (were) the input x? This procedure of associating the output y to the input x may or may not be a function. domian rangex y=f(x) f If it is a function, it is called the inverse function of f(x) and it is denoted as f –1(y).
- 8. A function f(x) = y takes an input x and produces one output y. Often we represent a function by the following figure. Inverse Functions We like to reverse the operation, i.e., if we know the output y, what was (were) the input x? This procedure of associating the output y to the input x may or may not be a function. domian rangex y=f(x) f If it is a function, it is called the inverse function of f(x) and it is denoted as f –1(y). x y=f(x) f
- 9. A function f(x) = y takes an input x and produces one output y. Often we represent a function by the following figure. Inverse Functions We like to reverse the operation, i.e., if we know the output y, what was (were) the input x? This procedure of associating the output y to the input x may or may not be a function. domian rangex y=f(x) f If it is a function, it is called the inverse function of f(x) and it is denoted as f –1(y). x=f–1(y) y=f(x) f f –1
- 10. A function f(x) = y takes an input x and produces one output y. Often we represent a function by the following figure. Inverse Functions We like to reverse the operation, i.e., if we know the output y, what was (were) the input x? This procedure of associating the output y to the input x may or may not be a function. domian rangex y=f(x) f If it is a function, it is called the inverse function of f(x) and it is denoted as f –1(y). We say f(x) and f –1(y) are the inverse of each other. x=f–1(y) y=f(x) f f –1
- 11. Example A. a. The function y = f(x) = 2x takes the input x and doubles it to get the output y. Inverse Functions
- 12. Example A. a. The function y = f(x) = 2x takes the input x and doubles it to get the output y. To reverse the operation, take an output y, Inverse Functions
- 13. Example A. a. The function y = f(x) = 2x takes the input x and doubles it to get the output y. To reverse the operation, take an output y, divided it by 2 and we get back to the x. Inverse Functions
- 14. Example A. a. The function y = f(x) = 2x takes the input x and doubles it to get the output y. To reverse the operation, take an output y, divided it by 2 and we get back to the x. In other words f –1(y) = y/2. Inverse Functions
- 15. Example A. a. The function y = f(x) = 2x takes the input x and doubles it to get the output y. To reverse the operation, take an output y, divided it by 2 and we get back to the x. In other words f –1(y) = y/2. So, for example, f –1(6) = 3 because f(3) = 6. Inverse Functions
- 16. Example A. a. The function y = f(x) = 2x takes the input x and doubles it to get the output y. To reverse the operation, take an output y, divided it by 2 and we get back to the x. In other words f –1(y) = y/2. So, for example, f –1(6) = 3 because f(3) = 6. b. Given y = f(x) = x2 and y = 9, Inverse Functions
- 17. Example A. a. The function y = f(x) = 2x takes the input x and doubles it to get the output y. To reverse the operation, take an output y, divided it by 2 and we get back to the x. In other words f –1(y) = y/2. So, for example, f –1(6) = 3 because f(3) = 6. b. Given y = f(x) = x2 and y = 9, there are two inputs namely x = 3 and x = –3 that give the output 9. x=3 y=9 f(x)=x2 x=–3 Inverse Functions
- 18. Example A. a. The function y = f(x) = 2x takes the input x and doubles it to get the output y. To reverse the operation, take an output y, divided it by 2 and we get back to the x. In other words f –1(y) = y/2. So, for example, f –1(6) = 3 because f(3) = 6. b. Given y = f(x) = x2 and y = 9, there are two inputs namely x = 3 and x = –3 that give the output 9. Therefore, the reverse procedure is not a function x=3 y=9 f(x)=x2 x=–3 not a function Inverse Functions
- 19. Example A. a. The function y = f(x) = 2x takes the input x and doubles it to get the output y. To reverse the operation, take an output y, divided it by 2 and we get back to the x. In other words f –1(y) = y/2. So, for example, f –1(6) = 3 because f(3) = 6. b. Given y = f(x) = x2 and y = 9, there are two inputs namely x = 3 and x = –3 that give the output 9. Therefore, the reverse procedure is not a function Inverse Functions x=3 y=9 f(x)=x2 x=–3 not a function Unless we intentionally select an answer, f –1(9) is not well defined Because there are two choices.
- 20. Example A. a. The function y = f(x) = 2x takes the input x and doubles it to get the output y. To reverse the operation, take an output y, divided it by 2 and we get back to the x. In other words f –1(y) = y/2. So, for example, f –1(6) = 3 because f(3) = 6. b. Given y = f(x) = x2 and y = 9, there are two inputs namely x = 3 and x = –3 that give the output 9. Therefore, the reverse procedure is not a function so f –1(y) does not exist. Inverse Functions x=3 y=9 f(x)=x2 x=–3 not a function Unless we intentionally select an answer, f –1(9) is not well defined Because there are two choices.
- 21. Example A. a. The function y = f(x) = 2x takes the input x and doubles it to get the output y. To reverse the operation, take an output y, divided it by 2 and we get back to the x. In other words f –1(y) = y/2. So, for example, f –1(6) = 3 because f(3) = 6. b. Given y = f(x) = x2 and y = 9, there are two inputs namely x = 3 and x = –3 that give the output 9. Therefore, the reverse procedure is not a function so f –1(y) does not exist. Inverse Functions But g –1(y) exists for y = g(x) = x2 with x ≥ 0, and that g –1(9) = 3. In fact g –1(y) = √y. x=3 y=9 f(x)=x2 x=–3 not a function
- 22. Example A. a. The function y = f(x) = 2x takes the input x and doubles it to get the output y. To reverse the operation, take an output y, divided it by 2 and we get back to the x. In other words f –1(y) = y/2. So, for example, f –1(6) = 3 because f(3) = 6. b. Given y = f(x) = x2 and y = 9, there are two inputs namely x = 3 and x = –3 that give the output 9. Therefore, the reverse procedure is not a function so f –1(y) does not exist. Inverse Functions But g –1(y) exists for y = g(x) = x2 with x ≥ 0, and that g –1(9) = 3. In fact g –1(y) = √y. Hence the existence of the inverse depends on the domain. x=3 y=9 f(x)=x2 x=–3 not a function
- 23. Inverse Functions u v u = v a one-to-one function A function is one-to-one if different inputs produce different outputs or that two inputs give two outputs.
- 24. Inverse Functions A function is one-to-one if different inputs produce different outputs or that two inputs give two outputs. That is, f(x) is said to be one-to-one if for every two inputs u and v such that u v, then f(u) f(v).
- 25. Inverse Functions u v u = v a one-to-one function A function is one-to-one if different inputs produce different outputs or that two inputs give two outputs. That is, f(x) is said to be one-to-one if for every two inputs u and v such that u v, then f(u) f(v).
- 26. Inverse Functions u f(u) v f(v) u = v f(u) = f(v) a one-to-one function A function is one-to-one if different inputs produce different outputs or that two inputs give two outputs. That is, f(x) is said to be one-to-one if for every two inputs u and v such that u v, then f(u) f(v).
- 27. Inverse Functions u f(u) v f(v) u = v f(u) = f(v) a one-to-one function u v u = v not a one-to-one function A function is one-to-one if different inputs produce different outputs or that two inputs give two outputs. That is, f(x) is said to be one-to-one if for every two inputs u and v such that u v, then f(u) f(v).
- 28. Inverse Functions u f(u) v f(v) u = v f(u) = f(v) a one-to-one function u f(u)=f(v) v u = v not a one-to-one function A function is one-to-one if different inputs produce different outputs or that two inputs give two outputs. That is, f(x) is said to be one-to-one if for every two inputs u and v such that u v, then f(u) f(v).
- 29. Example B. a. g(x) = 2x is one-to-one Inverse Functions u f(u) v f(v) u = v f(u) = f(v) a one-to-one function u f(u)=f(v) v u = v not a one-to-one function A function is one-to-one if different inputs produce different outputs or that two inputs give two outputs. That is, f(x) is said to be one-to-one if for every two inputs u and v such that u v, then f(u) f(v).
- 30. Example B. a. g(x) = 2x is one-to-one because if u v, then 2u 2v. Inverse Functions u f(u) v f(v) u = v f(u) = f(v) a one-to-one function u f(u)=f(v) v u = v not a one-to-one function A function is one-to-one if different inputs produce different outputs or that two inputs give two outputs. That is, f(x) is said to be one-to-one if for every two inputs u and v such that u v, then f(u) f(v).
- 31. Example B. a. g(x) = 2x is one-to-one because if u v, then 2u 2v. b. f(x) = x2 is not one-to-one because 3 –3, but f(3) = f(–3) = 9. Inverse Functions u f(u) v f(v) u = v f(u) = f(v) a one-to-one function u f(u)=f(v) v u = v not a one-to-one function A function is one-to-one if different inputs produce different outputs or that two inputs give two outputs. That is, f(x) is said to be one-to-one if for every two inputs u and v such that u v, then f(u) f(v).
- 32. Example B. a. g(x) = 2x is one-to-one because if u v, then 2u 2v. b. f(x) = x2 is not one-to-one e.g. 3 –3, but f(3) = f(–3) = 9. Inverse Functions u f(u) v f(v) u = v f(u) = f(v) a one-to-one function u f(u)=f(v) v u = v not a one-to-one function Note: To justify a function is 1–1, we have to show that for every pair of u v that f(u) f(v). A function is one-to-one if different inputs produce different outputs or that two inputs give two outputs. That is, f(x) is said to be one-to-one if for every two inputs u and v such that u v, then f(u) f(v).
- 33. Example B. a. g(x) = 2x is one-to-one because if u v, then 2u 2v. b. f(x) = x2 is not one-to-one e.g. 3 –3, but f(3) = f(–3) = 9. Inverse Functions u f(u) v f(v) u = v f(u) = f(v) a one-to-one function u f(u)=f(v) v u = v not a one-to-one function Note: To justify a function is 1–1, we have to show that for every pair of u v that f(u) f(v). To justify a function is not 1–1, all we need to do is to produce one pair of u v but f(u) = f(v). A function is one-to-one if different inputs produce different outputs or that two inputs give two outputs. That is, f(x) is said to be one-to-one if for every two inputs u and v such that u v, then f(u) f(v).
- 34. Inverse Functions If y = f(x) is one-to-one, then each output y came from one input x so that f –1(y) = x is well defined.
- 35. Inverse Functions Given y = f(x), to find f –1(y), just solve the equation y = f(x) for x in terms of y. If y = f(x) is one-to-one, then each output y came from one input x so that f –1(y) = x is well defined.
- 36. Inverse Functions Example C. Find the inverse function of y = f(x) = x – 53 4 Given y = f(x), to find f –1(y), just solve the equation y = f(x) for x in terms of y. If y = f(x) is one-to-one, then each output y came from one input x so that f –1(y) = x is well defined.
- 37. Inverse Functions Example C. Find the inverse function of y = f(x) = x – 5 Given y = x – 5 and solve for x. 3 4 3 4 Given y = f(x), to find f –1(y), just solve the equation y = f(x) for x in terms of y. If y = f(x) is one-to-one, then each output y came from one input x so that f –1(y) = x is well defined.
- 38. Inverse Functions Example C. Find the inverse function of y = f(x) = x – 5 Given y = x – 5 and solve for x. Clear denominator: 4y = 3x – 20 3 4 3 4 Given y = f(x), to find f –1(y), just solve the equation y = f(x) for x in terms of y. If y = f(x) is one-to-one, then each output y came from one input x so that f –1(y) = x is well defined.
- 39. Inverse Functions Example C. Find the inverse function of y = f(x) = x – 5 Given y = x – 5 and solve for x. Clear denominator: 4y = 3x – 20 4y + 20 = 3x 3 4 3 4 Given y = f(x), to find f –1(y), just solve the equation y = f(x) for x in terms of y. If y = f(x) is one-to-one, then each output y came from one input x so that f –1(y) = x is well defined.
- 40. Inverse Functions Example C. Find the inverse function of y = f(x) = x – 5 Given y = x – 5 and solve for x. Clear denominator: 4y = 3x – 20 4y + 20 = 3x x = 3 4 3 4 4y + 20 3 Given y = f(x), to find f –1(y), just solve the equation y = f(x) for x in terms of y. If y = f(x) is one-to-one, then each output y came from one input x so that f –1(y) = x is well defined.
- 41. If y = f(x) is one-to-one, then each output y came from one input x so that f –1(y) = x is well defined. Inverse Functions Example C. Find the inverse function of y = f(x) = x – 5 Given y = x – 5 and solve for x. Clear denominator: 4y = 3x – 20 4y + 20 = 3x x = 3 4 3 4 4y + 20 3 Given y = f(x), to find f –1(y), just solve the equation y = f(x) for x in terms of y. Hence f –1(y) = 4y + 20 3
- 42. Inverse Trigonometric Functions Trig–functions assign multiple inputs to the same output, e.g. sin(π/6) = sin(5π/6) = sin(–7π/6) = .. = ½.
- 43. Inverse Trigonometric Functions Trig–functions assign multiple inputs to the same output, e.g. sin(π/6) = sin(5π/6) = sin(–7π/6) = .. = ½. Hence their inverse association are not functions because there are multiple answers to the question such as “which angle has sine value ½?”.
- 44. Inverse Trigonometric Functions Trig–functions assign multiple inputs to the same output, e.g. sin(π/6) = sin(5π/6) = sin(–7π/6) = .. = ½. Hence their inverse association are not functions because there are multiple answers to the question such as “which angle has sine value ½?”. In such cases, we choose one specific angle as the principal answer to restrict the inverse procedures as functions.
- 45. Inverse Trigonometric Functions Trig–functions assign multiple inputs to the same output, e.g. sin(π/6) = sin(5π/6) = sin(–7π/6) = .. = ½. Hence their inverse association are not functions because there are multiple answers to the question such as “which angle has sine value ½?”. In such cases, we choose one specific angle as the principal answer to restrict the inverse procedures as functions. For example, if sin() = –½, we select = π/6 as the sine-inverse of –½, we write that sin–1(–½) = –π/6.
- 46. Inverse Trigonometric Functions Trig–functions assign multiple inputs to the same output, e.g. sin(π/6) = sin(5π/6) = sin(–7π/6) = .. = ½. Hence their inverse association are not functions because there are multiple answers to the question such as “which angle has sine value ½?”. In such cases, we choose one specific angle as the principal answer to restrict the inverse procedures as functions. For example, if sin() = –½, we select = π/6 as the sine-inverse of –½, we write that sin–1(–½) = –π/6. In general, given a number a such that –1 < a <1, π/2 –π/2 a –1 +1
- 47. Inverse Trigonometric Functions Trig–functions assign multiple inputs to the same output, e.g. sin(π/6) = sin(5π/6) = sin(–7π/6) = .. = ½. Hence their inverse association are not functions because there are multiple answers to the question such as “which angle has sine value ½?”. In such cases, we choose one specific angle as the principal answer to restrict the inverse procedures as functions. For example, if sin() = –½, we select = π/6 as the sine-inverse of –½, we write that sin–1(–½) = –π/6. In general, given a number a such that –1 < a <1, we define sin–1(a) = where sin() = a and –π/2 < < π/2. π/2 –π/2 aa –1 +1
- 48. Inverse Trigonometric Functions Trig–functions assign multiple inputs to the same output, e.g. sin(π/6) = sin(5π/6) = sin(–7π/6) = .. = ½. Hence their inverse association are not functions because there are multiple answers to the question such as “which angle has sine value ½?”. In such cases, we choose one specific angle as the principal answer to restrict the inverse procedures as functions. For example, if sin() = –½, we select = π/6 as the sine-inverse of –½, we write that sin–1(–½) = –π/6. In general, given a number a such that –1 < a <1, we define sin–1(a) = where sin() = a and –π/2 < < π/2. Sin–1(a) is also written as arcsin(a) or asin(a). π/2 –π/2 aa –1 +1
- 49. Inverse Trigonometric Functions In a similar manner, we define the inverse cosine. Given a number a such that –1 < a <1, cos–1(a) = where cos() = a and 0 < < π cos–1(a) is read as "cosine–inverse of a" and it is also written as arccos(a) or acos(a).
- 50. Inverse Trigonometric Functions In a similar manner, we define the inverse cosine. Given a number a such that –1 < a <1, cos–1(a) = where cos() = a and 0 < < π cos–1(a) is read as "cosine–inverse of a" and it is also written as arccos(a) or acos(a). 0π a –1 +1 cos–1(a) = with 0 ≤ ≤ π
- 51. Inverse Trigonometric Functions In a similar manner, we define the inverse cosine. Given a number a such that –1 < a <1, cos–1(a) = where cos() = a and 0 < < π cos–1(a) is read as "cosine–inverse of a" and it is also written as arccos(a) or acos(a). 0π a –1 +1 cos–1(a) = with 0 ≤ ≤ π
- 52. Inverse Trigonometric Functions In a similar manner, we define the inverse cosine. Given a number a such that –1 < a <1, cos–1(a) = where cos() = a and 0 < < π cos–1(a) is read as "cosine–inverse of a" and it is also written as arccos(a) or acos(a). Tangent outputs all real numbers, so the inverse tangent is defined for all a’s. 0π a –1 +1 cos–1(a) = with 0 ≤ ≤ π
- 53. Inverse Trigonometric Functions In a similar manner, we define the inverse cosine. Given a number a such that –1 < a <1, cos–1(a) = where cos() = a and 0 < < π cos–1(a) is read as "cosine–inverse of a" and it is also written as arccos(a) or acos(a). Given any number a, define tan–1(a) = , where –π/2 < < π/2 and that tan() = a. Tangent outputs all real numbers, so the inverse tangent is defined for all a’s. 0π a –1 +1 cos–1(a) = with 0 ≤ ≤ π tan–1(a) = with –π/2 < < π/2 π/2 –π/2 a –1 +1
- 54. Inverse Trigonometric Functions In a similar manner, we define the inverse cosine. Given a number a such that –1 < a <1, cos–1(a) = where cos() = a and 0 < < π cos–1(a) is read as "cosine–inverse of a" and it is also written as arccos(a) or acos(a). Given any number a, define tan–1(a) = , where –π/2 < < π/2 and that tan() = a. Tangent outputs all real numbers, so the inverse tangent is defined for all a’s. tan–1(a) = with –π/2 < < π/2 0π a –1 +1 π/2 –π/2 a –1 +1 cos–1(a) = with 0 ≤ ≤ π
- 55. Inverse Trigonometric Functions In a similar manner, we define the inverse cosine. Given a number a such that –1 < a <1, cos–1(a) = where cos() = a and 0 < < π cos–1(a) is read as "cosine–inverse of a" and it is also written as arccos(a) or acos(a). Given any number a, define tan–1(a) = , where –π/2 < < π/2 and that tan() = a. tan–1(a) is also written as arctan(a) or atan(a). Tangent outputs all real numbers, so the inverse tangent is defined for all a’s. tan–1(a) = with –π/2 < < π/2 0π a –1 +1 π/2 –π/2 a –1 +1 cos–1(a) = with 0 ≤ ≤ π
- 56. Inverse Trigonometric Functions Example D. a. sin–1(1/2) = π/6 b. cos–1(–1/2) = 2π/3 c. cos–1(–1) = π d. sin–1(2) = UND e. cos–1(0.787) 38.1o f. tan–1(3) = π/3 For –1≤ a ≤1, cos–1(a) = , 0 ≤ ≤ π Here are the inverse trig-functions again. For –1≤ a ≤1, sin–1(a) = , –π/2 ≤ ≤ π/2 All a’s, tan–1(a) = , –π/2< < π/2
- 57. Inverse Trigonometric Functions Example D. a. sin–1(1/2) = π/6 b. cos–1(–1/2) = 2π/3 c. cos–1(–1) = π d. sin–1(2) = UDF e. cos–1(0.787) 38.1o f. tan–1(3) = π/3 For –1≤ a ≤1, cos–1(a) = , 0 ≤ ≤ π Here are the inverse trig-functions again. For –1≤ a ≤1, sin–1(a) = , –π/2 ≤ ≤ π/2 All a’s, tan–1(a) = , –π/2< < π/2
- 58. Example E. Solve the triangle with a=29, <B=16o, c=74. Inverse Trigonometric Functions
- 59. From the cosine law we have that b2 = 742 + 292 – 2ac(cos 16o) or that b 46.8. Example E. Solve the triangle with a=29, <B=16o, c=74. Inverse Trigonometric Functions
- 60. From the cosine law we have that b2 = 742 + 292 – 2ac(cos 16o) or that b 46.8. Example E. Solve the triangle with a=29, <B=16o, c=74. We can't solve for C using sine–inverse directly because it’s more than 90o so we solve for A first. Inverse Trigonometric Functions
- 61. From the cosine law we have that b2 = 742 + 292 – 2ac(cos 16o) or that b 46.8. Example E. Solve the triangle with a=29, <B=16o, c=74. We can't solve for C using sine–inverse directly because it’s more than 90o so we solve for A first. sin(A) sin(16) 29 46.8 = Inverse Trigonometric Functions
- 62. From the cosine law we have that b2 = 742 + 292 – 2ac(cos 16o) or that b 46.8. Example E. Solve the triangle with a=29, <B=16o, c=74. We can't solve for C using sine–inverse directly because it’s more than 90o so we solve for A first. sin(A) sin(16) 29 46.8 = sin(A) 29sin(16) 46.8= 0.171 Inverse Trigonometric Functions
- 63. From the cosine law we have that b2 = 742 + 292 – 2ac(cos 16o) or that b 46.8. Example E. Solve the triangle with a=29, <B=16o, c=74. We can't solve for C using sine–inverse directly because it’s more than 90o so we solve for A first. sin(A) sin(16) 29 46.8 = sin(A) 29sin(16) 46.8= 0.171 Hence A = sin–1(0.171) 9.83o Inverse Trigonometric Functions
- 64. From the cosine law we have that b2 = 742 + 292 – 2ac(cos 16o) or that b 46.8. Example E. Solve the triangle with a=29, <B=16o, c=74. We can't solve for C using sine–inverse directly because it’s more than 90o so we solve for A first. sin(A) sin(16) 29 46.8 = sin(A) 29sin(16) 46.8= 0.171 Hence A = sin–1(0.171) 9.83o and C = 180 – 16 – 9.83 154.2o Inverse Trigonometric Functions
- 65. Inverse Trigonometric Functions Using the SOACAHTOA relations, given an inverse trig–value, we may draw a generic right triangle that reflects the relations between the values.
- 66. Inverse Trigonometric Functions Using the SOACAHTOA relations, given an inverse trig–value, we may draw a generic right triangle that reflects the relations between the values. Example F. Draw the angle cos–1(2/a) and find tan(cos–1(2/a) ).
- 67. Inverse Trigonometric Functions Using the SOACAHTOA relations, given an inverse trig–value, we may draw a generic right triangle that reflects the relations between the values. Example F. Draw the angle cos–1(2/a) and find tan(cos–1(2/a) ). Let α = cos–1(2/a) so cos(α) = 2/a = Adj/Hyp,
- 68. Inverse Trigonometric Functions Using the SOACAHTOA relations, given an inverse trig–value, we may draw a generic right triangle that reflects the relations between the values. Example F. Draw the angle cos–1(2/a) and find tan(cos–1(2/a) ). Let α = cos–1(2/a) so cos(α) = 2/a = Adj/Hyp, then the following triangle represents α.
- 69. Inverse Trigonometric Functions Using the SOACAHTOA relations, given an inverse trig–value, we may draw a generic right triangle that reflects the relations between the values. α 2 = Adj. a = Hyp. Example F. Draw the angle cos–1(2/a) and find tan(cos–1(2/a) ). Let α = cos–1(2/a) so cos(α) = 2/a = Adj/Hyp, then the following triangle represents α.
- 70. a2 – 4 Inverse Trigonometric Functions Using the SOACAHTOA relations, given an inverse trig–value, we may draw a generic right triangle that reflects the relations between the values. α 2 = Adj. a = Hyp. Example F. Draw the angle cos–1(2/a) and find tan(cos–1(2/a) ). Let α = cos–1(2/a) so cos(α) = 2/a = Adj/Hyp, then the following triangle represents α. By Pythagorean Theorem the third side is a2 – 4.
- 71. a2 – 4 Therefore, tan(cos–1(2/a)) = tan(α) Inverse Trigonometric Functions Using the SOACAHTOA relations, given an inverse trig–value, we may draw a generic right triangle that reflects the relations between the values. α 2 = Adj. a = Hyp. Example F. Draw the angle cos–1(2/a) and find tan(cos–1(2/a) ). Let α = cos–1(2/a) so cos(α) = 2/a = Adj/Hyp, then the following triangle represents α. By Pythagorean Theorem the third side is a2 – 4.
- 72. a2 – 4 Therefore, tan(cos–1(2/a)) = tan(α) = Inverse Trigonometric Functions Using the SOACAHTOA relations, given an inverse trig–value, we may draw a generic right triangle that reflects the relations between the values. α 2 = Adj. a = Hyp. Example F. Draw the angle cos–1(2/a) and find tan(cos–1(2/a) ). Let α = cos–1(2/a) so cos(α) = 2/a = Adj/Hyp, then the following triangle represents α. By Pythagorean Theorem the third side is a2 – 4. a2 – 4 2
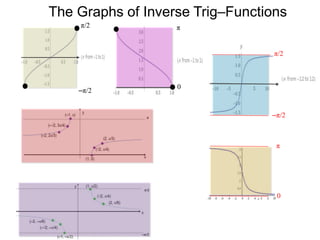
- 73. The Graphs of Inverse Trig–Functions
- 74. and the sine–inverse y = sin–1(x) : [–1, 1] [–π/2, π/2]. We will use the variable x and y for the functions y = sin(x): [–π/2, π/2] [–1, 1]. The Graphs of Inverse Trig–Functions
- 75. and the sine–inverse y = sin–1(x) : [–1, 1] [–π/2, π/2]. We will use the variable x and y for the functions y = sin(x): [–π/2, π/2] [–1, 1]. The Graphs of Inverse Trig–Functions As in the case for all inverse pairs of functions, the graph of y = sin–1(x) may be obtained by reflecting y = sin(x) across y = x.
- 76. –1 y = sin–1(x) y = x y = sin(x) and the sine–inverse y = sin–1(x) : [–1, 1] [–π/2, π/2]. We will use the variable x and y for the functions y = sin(x): [–π/2, π/2] [–1, 1]. The Graphs of Inverse Trig–Functions As in the case for all inverse pairs of functions, the graph of y = sin–1(x) may be obtained by reflecting y = sin(x) across y = x. –π/2 π/2 1 –1
- 77. –1 –π/2 y = sin–1(x) 1 –1 π/2 y = x y = sin(x) and the sine–inverse y = sin–1(x) : [–1, 1] [–π/2, π/2]. We will use the variable x and y for the functions y = sin(x): [–π/2, π/2] [–1, 1]. The Graphs of Inverse Trig–Functions As in the case for all inverse pairs of functions, the graph of y = sin–1(x) may be obtained by reflecting y = sin(x) across y = x.
- 78. –1 –π/2 1 –1 –π/2 π/2 1–1 π/2 y = x y = sin(x) and the sine–inverse y = sin–1(x) : [–1, 1] [–π/2, π/2]. We will use the variable x and y for the functions y = sin(x): [–π/2, π/2] [–1, 1]. The Graphs of Inverse Trig–Functions As in the case for all inverse pairs of functions, the graph of y = sin–1(x) may be obtained by reflecting y = sin(x) across y = x. y = sin–1(x)
- 79. –1 –π/2 1 –1 –π/2 π/2 1–1 π/2 y = x y = sin(x) and the sine–inverse y = sin–1(x) : [–1, 1] [–π/2, π/2]. We will use the variable x and y for the functions y = sin(x): [–π/2, π/2] [–1, 1]. (π/6 ½) The Graphs of Inverse Trig–Functions As in the case for all inverse pairs of functions, the graph of y = sin–1(x) may be obtained by reflecting y = sin(x) across y = x. For example, the point (π/6, ½) on y = sin(x) y = sin–1(x)
- 80. –1 –π/2 1 –1 –π/2 π/2 1–1 π/2 y = x y = sin(x) and the sine–inverse y = sin–1(x) : [–1, 1] [–π/2, π/2]. We will use the variable x and y for the functions y = sin(x): [–π/2, π/2] [–1, 1]. (½, π/6) (π/6 ½) The Graphs of Inverse Trig–Functions As in the case for all inverse pairs of functions, the graph of y = sin–1(x) may be obtained by reflecting y = sin(x) across y = x. For example, the point (π/6, ½) on y = sin(x) corresponds to (½, π/6) on y = sin–1(x) since (, a) and (a, ) are the reflection of each other. y = sin–1(x)
- 81. The graph of y = cos–1(x) is the reflection of the graph of y = cos (x) where y = cos(x): [0, π] [–1, 1] and y = cos–1(x): [–1, 1] [0, π] The Graphs of Inverse Trig–Functions
- 82. The Graphs of Inverse Trig–Functions y = x π 0 1 –1 π y = cos(x) y = cos–1(x) The graph of y = cos–1(x) is the reflection of the graph of y = cos (x) where y = cos(x): [0, π] [–1, 1] and y = cos–1(x): [–1, 1] [0, π]
- 83. The Graphs of Inverse Trig–Functions y = x π 0 1 –1 Here are some specific cosine inverse values: π (1, 0) (–1, π) (0, π/2) cos–1(1) = 0, cos–1(0) = π/2, and cos–1(–1) = π. y = cos(x) y = cos–1(x) The graph of y = cos–1(x) is the reflection of the graph of y = cos (x) where y = cos(x): [0, π] [–1, 1] and y = cos–1(x): [–1, 1] [0, π]
- 84. The Graphs of Inverse Trig–Functions y = cos(x) y = x π 0 1 –1 Here are some specific cosine inverse values: π (1, 0) (–1, π) (0, π/2) cos–1(1) = 0, cos–1(0) = π/2, and cos–1(–1) = π. P (0.74, 0.74) intersection point P (0.74, 0.74) in radian. By solving cos(x) = x numerically, we've the .y = cos–1(x) The graph of y = cos–1(x) is the reflection of the graph of y = cos (x) where y = cos(x): [0, π] [–1, 1] and y = cos–1(x): [–1, 1] [0, π]
- 85. The domain of y = tan–1(x) is all real numbers and the output y is restricted to –π/2 < y < π/2, The Graphs of Inverse Trig–Functions
- 86. The domain of y = tan–1(x) is all real numbers and the output y is restricted to –π/2 < y < π/2, The Graphs of Inverse Trig–Functions x tan–1(x) 0 1/3 1 3 ∞–1/3–1–3–∞
- 87. The domain of y = tan–1(x) is all real numbers and the output y is restricted to –π/2 < y < π/2, The Graphs of Inverse Trig–Functions x tan–1(x) 0 1/3 1 3 ∞–1/3–1–3–∞ π/60 π/4 π/3 π/2
- 88. The domain of y = tan–1(x) is all real numbers and the output y is restricted to –π/2 < y < π/2, The Graphs of Inverse Trig–Functions x tan–1(x) π/60 π/4 π/3 0 1/3 1 3 ∞–1/3–1–3 π/2 –∞ y = π/2 (0,0) (1,π/4) (√3, π/3)
- 89. The domain of y = tan–1(x) is all real numbers and the output y is restricted to –π/2 < y < π/2, The Graphs of Inverse Trig–Functions x tan–1(x) π/60 π/4 π/3–π/2 0 1/3 1 3 ∞ –π/6 –1/3 –π/4 –1 –π/3 –3 π/2 –∞ y = π/2 (0,0) (1,π/4) (√3, π/3)
- 90. The domain of y = tan–1(x) is all real numbers and the output y is restricted to –π/2 < y < π/2, The Graphs of Inverse Trig–Functions x tan–1(x) π/60 π/4 π/3–π/2 0 1/3 1 3 ∞ –π/6 –1/3 –π/4 –1 –π/3 –3 π/2 –∞ y = π/2 y = –π/2 (0,0) (1,π/4) (–1,–π/4) (√3, π/3) (–√3, –π/3)
- 91. The domain of y = tan–1(x) is all real numbers and the output y is restricted to –π/2 < y < π/2, The Graphs of Inverse Trig–Functions Here is the graph of y = tan–1(x) x tan–1(x) π/60 π/4 π/3–π/2 0 1/3 1 3 ∞ –π/6 –1/3 –π/4 –1 –π/3 –3 π/2 –∞ y = π/2 y = –π/2 (0,0) (1,π/4) (–1,–π/4) (√3, π/3) (–√3, –π/3)
- 92. The domain of y = tan–1(x) is all real numbers and the output y is restricted to –π/2 < y < π/2, The Graphs of Inverse Trig–Functions Here is the graph of y = tan–1(x) x tan–1(x) π/60 π/4 π/3–π/2 0 1/3 1 3 ∞ –π/6 –1/3 –π/4 –1 –π/3 –3 π/2 –∞ y = π/2 y = –π/2 (0,0) (1,π/4) Remark: y =tan–1(x) has two horizontal asymptotes. (–1,–π/4) (√3, π/3) (–√3, –π/3)
- 93. Inverse Trigonometric Functions Cotangent–inverse is similar to tangent–inverse. Given any number a, we define cot–1(a) = , where 0 < < π and that cot() = a. Cot–1(a) is also written as arccot(a) or acot(a).
- 94. Inverse Trigonometric Functions Cotangent–inverse is similar to tangent–inverse. Given any number a, we define cot–1(a) = , where 0 < < π and that cot() = a. Cot–1(a) is also written as arccot(a) or acot(a). Here is the graph of y = cot–1(x) (0, π/2) (1, π/4) x y π (–1, 3π/4) (√3, π/6) (–√3, 5π/6)
- 95. The Graphs of Inverse Trig–Functions For |a| ≥ 1, we define sec–1(a) = with sec() = a, where 0 < < π, ≠ π/2. Sec–1(a) is also noted as arcsec(a) or asec(a). Sin() and cos() vary between –1 and 1, so their reciprocals |csc()| and |sec()| ≥ 1.
- 96. Using x and y, here is the graph of y = sec–1(x). The Graphs of Inverse Trig–Functions (1, 0) x y (√2, π/4) (2, π/3) (–1, π) (–√2, 3π/4) (–2, 2π/3) For |a| ≥ 1, we define sec–1(a) = with sec() = a, where 0 < < π, ≠ π/2. Sec–1(a) is also noted as arcsec(a) or asec(a). Sin() and cos() vary between –1 and 1, so their reciprocals |csc()| and |sec()| ≥ 1. π
- 97. The Graphs of Inverse Trig–Functions Given a number a such that |a| ≥ 1, we define csc–1(a) = with csc() = a where –π/2 < < π/2, ≠ 0. Csc–1(a) is also noted as arccsc (a) or acsc (a).
- 98. The Graphs of Inverse Trig–Functions Given a number a such that |a| ≥ 1, we define csc–1(a) = with csc() = a where –π/2 < < π/2, ≠ 0. Csc–1(a) is also noted as arccsc (a) or acsc (a). Using x and y, here is the graph of y = csc–1(x). (1, π/2) x y (–√2, –π/4) (2, π/6) (–1, –π/2) (√2, π/4) (–2, –π/6) –π/2 π/2
- 99. –π/2 π/2 The Graphs of Inverse Trig–Functions π 0 π/2 –π/2 π 0
- 100. One of the reasons for creating inverse functions is for solving equations. Linear Trig-Equations
- 101. One of the reasons for creating inverse functions is for solving equations. Linear Trig-Equations The function 3x = y is different from x2 or sin(x) in that if we know the output y = 1/2, then we know the precise input x, in this case, 3x = ½, so x = 1/6.
- 102. One of the reasons for creating inverse functions is for solving equations. Linear Trig-Equations Such is not the case for x2 or sin(x). The function 3x = y is different from x2 or sin(x) in that if we know the output y = 1/2, then we know the precise input x, in this case, 3x = ½, so x = 1/6.
- 103. One of the reasons for creating inverse functions is for solving equations. Linear Trig-Equations Such is not the case for x2 or sin(x). If the output y = ½ so that x2 = ½ or sin(x) = ½, we won’t be able to determine a precise input, instead we have multiple or even infinite possibilities. The function 3x = y is different from x2 or sin(x) in that if we know the output y = 1/2, then we know the precise input x, in this case, 3x = ½, so x = 1/6.
- 104. One of the reasons for creating inverse functions is for solving equations. Linear Trig-Equations Such is not the case for x2 or sin(x). If the output y = ½ so that x2 = ½ or sin(x) = ½, we won’t be able to determine a precise input, instead we have multiple or even infinite possibilities. In these situations, we utilize trig-inverse functions to obtain their solutions. The function 3x = y is different from x2 or sin(x) in that if we know the output y = 1/2, then we know the precise input x, in this case, 3x = ½, so x = 1/6.
- 105. One of the reasons for creating inverse functions is for solving equations. Linear Trig-Equations Such is not the case for x2 or sin(x). If the output y = ½ so that x2 = ½ or sin(x) = ½, we won’t be able to determine a precise input, instead we have multiple or even infinite possibilities. In these situations, we utilize trig-inverse functions to obtain their solutions. The function 3x = y is different from x2 or sin(x) in that if we know the output y = 1/2, then we know the precise input x, in this case, 3x = ½, so x = 1/6. Specifically, we will solve linear trig-equations, that is, equations of the form aX + b = 0 where X is a trig-function.
- 106. Important Trigonometric Values Solving linear trig-equations is to solve for positions on the unit circle.
- 107. Important Trigonometric Values Solving linear trig-equations is to solve for positions on the unit circle. From the position-solutions, we apply the inverse trig-functions to obtain angular- solutions and the list of all solutions, if necessary.
- 108. Important Trigonometric Values Solving linear trig-equations is to solve for positions on the unit circle. From the position-solutions, we apply the inverse trig-functions to obtain angular- solutions and the list of all solutions, if necessary. Example g. a. Draw the two locations on the unit circle corresponding to where 5sin() – 3 = 0.
- 109. Important Trigonometric Values Solving linear trig-equations is to solve for positions on the unit circle. From the position-solutions, we apply the inverse trig-functions to obtain angular- solutions and the list of all solutions, if necessary. Example g. a. Draw the two locations on the unit circle corresponding to where 5sin() – 3 = 0. 5sin() – 3 = 0 or sin() = 3/5 = y-coordinate of the point on the circle.
- 110. Important Trigonometric Values Solving linear trig-equations is to solve for positions on the unit circle. From the position-solutions, we apply the inverse trig-functions to obtain angular- solutions and the list of all solutions, if necessary. Example g. a. Draw the two locations on the unit circle corresponding to where 5sin() – 3 = 0. 5sin() – 3 = 0 or sin() = 3/5 = y-coordinate of the point on the circle. It’s positive so both points are at the top-half of the circle as shown. (–4/5, 3/5) (4/5, 3/5)
- 111. Important Trigonometric Values Solving linear trig-equations is to solve for positions on the unit circle. From the position-solutions, we apply the inverse trig-functions to obtain angular- solutions and the list of all solutions, if necessary. By the Pythagorean Theorem we find x = ±4/5 so the points are (4/5, 3/5) or (–4/5, 3/5). Example g. a. Draw the two locations on the unit circle corresponding to where 5sin() – 3 = 0. 5sin() – 3 = 0 or sin() = 3/5 = y-coordinate of the point on the circle. It’s positive so both points are at the top-half of the circle as shown. (–4/5, 3/5) (4/5, 3/5)
- 112. Important Trigonometric Values b. Find the values of between 0 and π for the ’s. (–4/5, 3/5) (4/5, 3/5) A Since sin() = 3/5, from the figure, angle A is sin–1(3/5) 36.9o,
- 113. Important Trigonometric Values b. Find the values of between 0 and π for the ’s. Since sin() = 3/5, from the figure, angle A is sin–1(3/5) 36.9o, and angle B 180 – 36.9o = 143.1o (–4/5, 3/5) (4/5, 3/5) A B
- 114. Important Trigonometric Values b. Find the values of between 0 and π for the ’s. Since sin() = 3/5, from the figure, angle A is sin–1(3/5) 36.9o, and angle B 180 – 36.9o = 143.1o (–4/5, 3/5) (4/5, 3/5) A B c. List all solutions of 5sin() – 3 = 0.
- 115. Important Trigonometric Values b. Find the values of between 0 and π for the ’s. Since sin() = 3/5, from the figure, angle A is sin–1(3/5) 36.9o, and angle B 180 – 36.9o = 143.1o (–4/5, 3/5) (4/5, 3/5) A B c. List all solutions of 5sin() – 3 = 0. Each 360o corresponds to one cycle, or that n360o corresponds to going around n times, where n is an integer.
- 116. Important Trigonometric Values b. Find the values of between 0 and π for the ’s. Since sin() = 3/5, from the figure, angle A is sin–1(3/5) 36.9o, and angle B 180 – 36.9o = 143.1o (–4/5, 3/5) (4/5, 3/5) A B c. List all solutions of 5sin() – 3 = 0. Each 360o corresponds to one cycle, or that n360o corresponds to going around n times, where n is an integer. Hence the following is a complete list of solutions: {36.9o+ n360o or 143.1o + n360o}
- 117. Important Trigonometric Values b. Find the values of between 0 and π for the ’s. Since sin() = 3/5, from the figure, angle A is sin–1(3/5) 36.9o, and angle B 180 – 36.9o = 143.1o (–4/5, 3/5) (4/5, 3/5) A B c. List all solutions of 5sin() – 3 = 0. Each 360o corresponds to one cycle, or that n360o corresponds to going around n times, where n is an integer. Hence the following is a complete list of solutions: {36.9o+ n360o or 143.1o + n360o} Sometimes we use the argument to π or 2π in the equation to obtain answers in integers or fractions, instead of answers in multiples of π.
- 118. Important Trigonometric Values Example H. a. Draw the two locations corresponding to angle α on the unit circle where 2cos(α) – 1 = 0.
- 119. Important Trigonometric Values Example H. a. Draw the two locations corresponding to angle α on the unit circle where 2cos(α) – 1 = 0. We have 2cos(α) – 1 = 0 or cos(α) = ½ .
- 120. Important Trigonometric Values Example H. a. Draw the two locations corresponding to angle α on the unit circle where 2cos(α) – 1 = 0. (1/2, √2/2) (1/2, –√2/2) We have 2cos(α) – 1 = 0 or cos(α) = ½ . Hence the points are (1/2, √2/2) and(1/2, –√2/2).
- 121. Important Trigonometric Values Example H. a. Draw the two locations corresponding to angle α on the unit circle where 2cos(α) – 1 = 0. b. List two angles for α that correspond to the two points then list all the solutions for α. We have 2cos(α) – 1 = 0 or cos(α) = ½ . Hence the points are (1/2, √2/2) and(1/2, –√2/2). (1/2, √2/2) (1/2, –√2/2)
- 122. Important Trigonometric Values Example H. a. Draw the two locations corresponding to angle α on the unit circle where 2cos(α) – 1 = 0. b. List two angles for α that correspond to the two points then list all the solutions for α. (1/2, √2/2) (1/2, –√2/2) We have 2cos(α) – 1 = 0 or cos(α) = ½ . Hence the points are (1/2, √2/2) and(1/2, –√2/2). –π/3 π/3 Two angles for the positions are α = ±π/3.
- 123. Important Trigonometric Values Example H. a. Draw the two locations corresponding to angle α on the unit circle where 2cos(α) – 1 = 0. b. List two angles for α that correspond to the two points then list all the solutions for α. (1/2, √2/2) (1/2, –√2/2) We have 2cos(α) – 1 = 0 or cos(α) = ½ . Hence the points are (1/2, √2/2) and(1/2, –√2/2). Two angles for the positions are α = ±π/3. Hence a list for all the solutions for α is {±π/3 + 2nπ}. –π/3 π/3
- 124. Important Trigonometric Values Example H. a. Draw the two locations corresponding to angle α on the unit circle where 2cos(α) – 1 = 0. b. List two angles for α that correspond to the two points then list all the solutions for α. (1/2, √2/2) (1/2, –√2/2) We have 2cos(α) – 1 = 0 or cos(α) = ½ . Hence the points are (1/2, √2/2) and(1/2, –√2/2). Two angles for the positions are α = ±π/3. Hence a list for all the solutions for α is {2nπ±π/3}. c. Find all the solutions for where 2cos(2π) – 1 = 0. –π/3 π/3
- 125. Important Trigonometric Values Example H. a. Draw the two locations corresponding to angle α on the unit circle where 2cos(α) – 1 = 0. b. List two angles for α that correspond to the two points then list all the solutions for α. (1/2, √2/2) (1/2, –√2/2) We have 2cos(α) – 1 = 0 or cos(α) = ½ . Hence the points are (1/2, √2/2) and(1/2, –√2/2). Two angles for the positions are α = ±π/3. Hence a list for all the solutions for α is {2nπ±π/3}. c. Find all the solutions for where 2cos(2π) – 1 = 0. We have that cos(2π) = ½ so 2π = 2nπ±π/3, –π/3 π/3
- 126. Important Trigonometric Values Example H. a. Draw the two locations corresponding to angle α on the unit circle where 2cos(α) – 1 = 0. b. List two angles for α that correspond to the two points then list all the solutions for α. (1/2, √2/2) A B (1/2, –√2/2) We have 2cos(α) – 1 = 0 or cos(α) = ½ . Hence the points are (1/2, √2/2) and(1/2, –√2/2). Two angles for the positions are α = ±π/3. Hence a list for all the solutions for α is {2nπ±π/3}. c. Find all the solutions for where 2cos(2π) – 1 = 0. We have that cos(2π) = ½ so 2π = 2nπ±π/3, or = (2nπ±π/3)/2π = n±1/6 where n is any integer.
- 127. Notes on Square–Sum Identities Writing S(x) as S and replacing C2 as 1 – S2, we’ve S2 – (1 – S2) = S or 2S2 – S – 1 = 0 so (2S + 1)(S – 1) = 0 Hence 2S = 1, or S(x) = ½ so x = π/6 or 5π/6, or that S = 1, so x = π/2. Example I. Solve the equation S2(x) – C2(x) = S(x). a. Find all solutions x between 0 and 2π. b. Find all solutions for x. By adding 2nπ where n is an integer, to the solutions from a. we obtain all the solutions for x. Here is a list: {π/6 or π/2 or 5π/6 + 2nπ, where n is an integer}.
- 128. HW. A. Linear Trig-Equations Find the exact answers. 1. sin–1(0), sin–1(1), sin–1(–1), sin–1(1/2), sin–1(–1/2), sin–1(√2/2), sin–1(–√2/2), sin–1(√3/2), sin–1(–√3/2), 2. List all the cosine inverses of the above values. 3. tan–1(0), tan–1(1), tan–1(–1), tan–1(√3), tan–1(–√3), tan–1(1/√3), tan–1(–1/√3), 4. List all the cosine inverses of the values in 3. 5. Given A = sin–1(√3/2) find the exact values of cos(A) and tan(A). Ans: ½, 1/√3 6. Given A = tan–1(3/2) find the exact values of cos(A) and sin(A).
- 129. HW. A. Linear Trig-Equations 7. Given A = cos–1(1/3) find the exact values of sin (A) and tan(A). 8. Given A = tan–1(–4/3) find the exact values of cos(A) and sin(A). 9. Find exact value of sin–1(sin (π/3)), sin–1(sin(–π/3)), sin–1( sin(–4π/3)), sin–1(sin(4π/3)), 10. Find exact value of cos–1(sin(π/3)), cos–1( sin(–π/3)), cos–1( sin(–4π/3)), cos–1(sin(4π/3)),
- 130. HW. B. Linear Trig-Equations 1. Find the answer in terms of x a. sin(cos–1(x)) b. cos(sin–1(x)) c. tan(sin–1(x)), d. sin(tan–1(x)) 2. Find the answer in terms of x a. sin(cos–1(x/2)) b. cos(sin–1(x/2)) c. tan(sin–1(x/2)), d. sin(tan–1(x/2)) 3. Find the answer in terms of x a. sin(cos–1(2/x)) b. cos(sin–1(2/x)) c. tan(sin–1(2/x)), d. sin(tan–1(2/x))
- 131. Linear Trig-Equations Exercise. C. Solve the following futons. equation S2(x) – C2(x) = S(x). Find the x’s between 0 and 2π, then list all the solutions. 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. sin2 𝑥 − 1 = 0 4 cos2 𝑥 − 1 = 0 tan2 𝑥 − 3 = 0 cot2 𝑥 − 1 = 0 2sin2 𝑥 + sin (x) = 0 cos2 𝑥 − cos (x) = 0 tan 𝑥 = 1 cos 𝑥 = − 2 2 sin 𝑥 = − 1 2 sec 𝑥 = −2 9. Ans:. 1. 𝜋 4 + 𝑛𝜋 3. 7 6 𝜋 + 2𝑛𝜋, 11 6 𝜋 + 2𝑛𝜋 5. 𝜋 2 + 𝑛𝜋 7. 𝜋 3 + 2𝑛𝜋, 2𝜋 3 + 2𝑛𝜋 𝑛𝜋, 7 6 𝜋 + 2𝑛𝜋, 11 6 𝜋 + 2𝑛𝜋