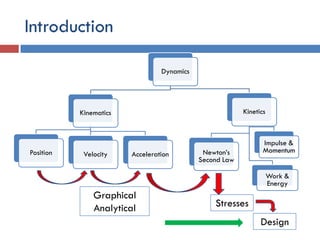
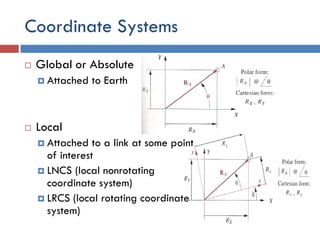
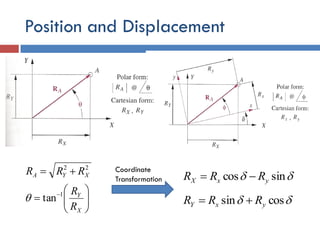
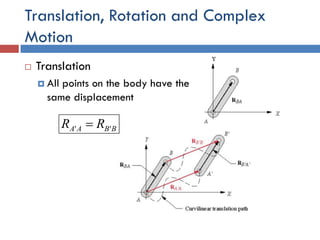
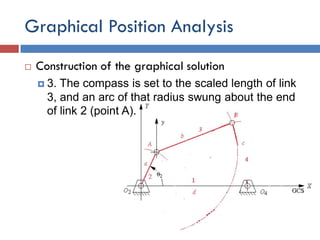
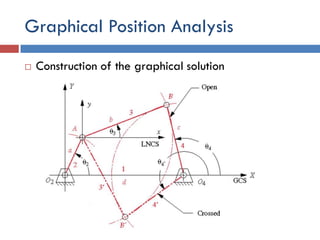
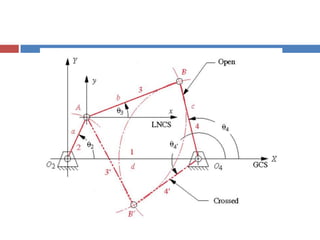
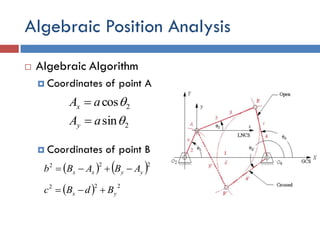
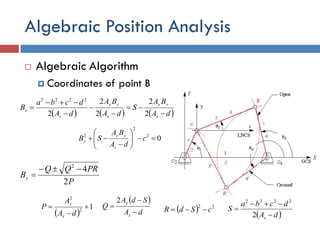
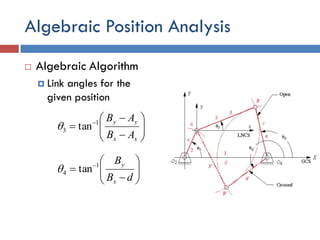
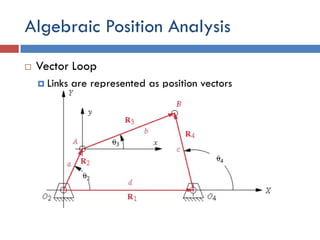
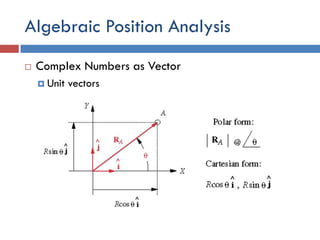
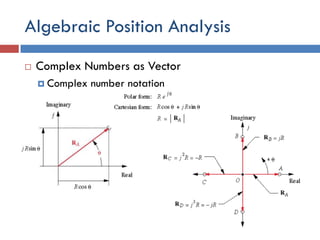
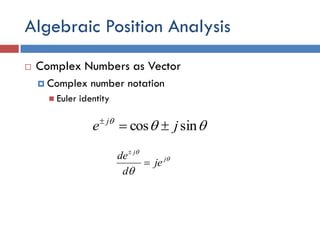
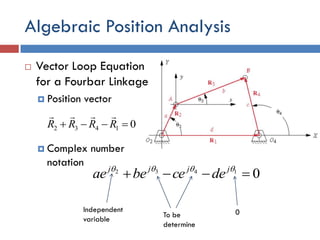
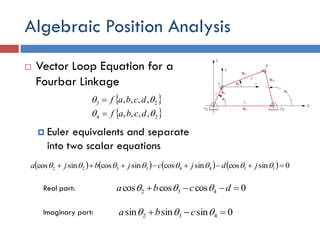
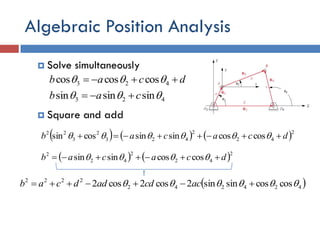
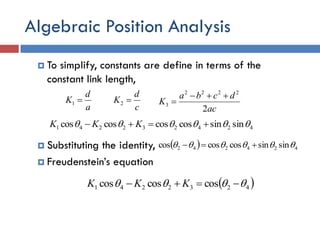
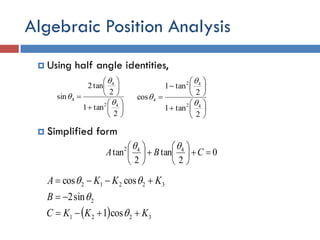
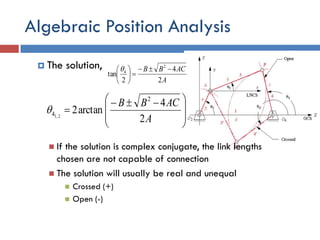
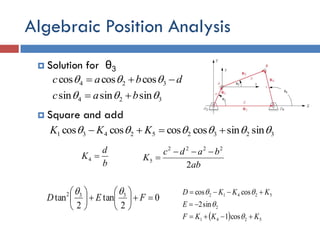
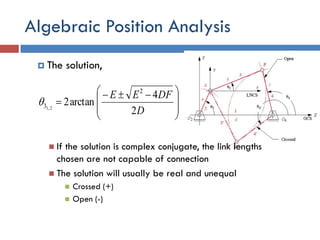
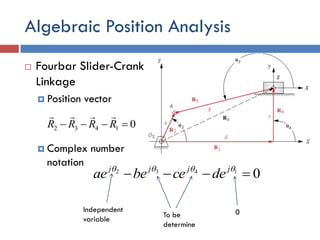
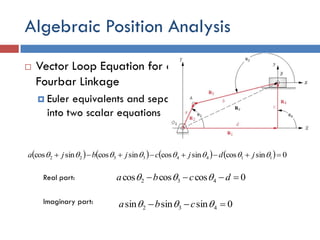
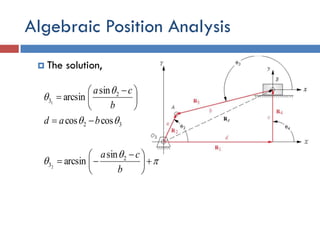
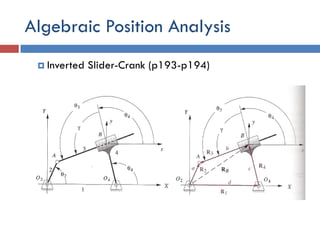
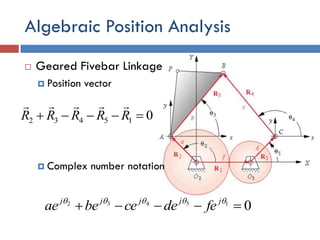
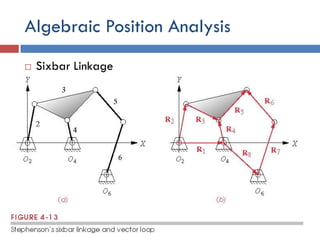
This document provides an overview of position analysis techniques for linkages and mechanisms. It discusses coordinate systems, position and displacement concepts, and methods for graphical and algebraic position analysis. Graphical methods involve drawing the linkage to scale based on given parameters and measuring positions. Algebraic methods develop vector loop equations in terms of complex numbers and solve for unknown positions and angles. Specific techniques are presented for common linkages including fourbars, slider-cranks, and geared fivebars.