


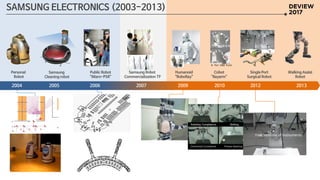
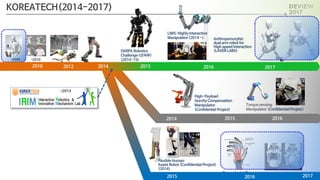
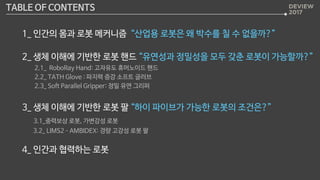

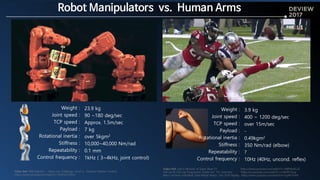




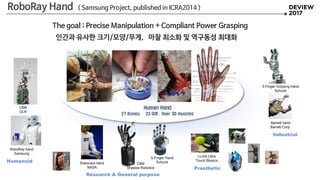
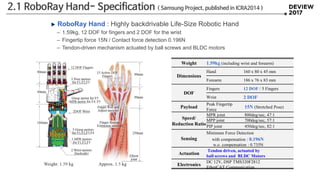

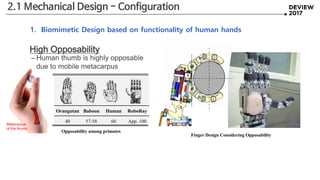
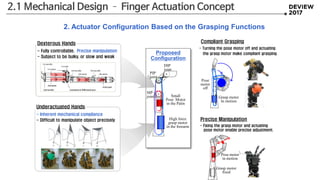

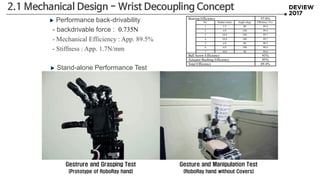
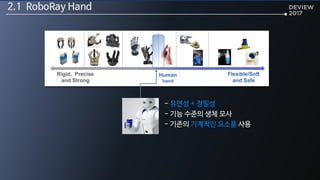
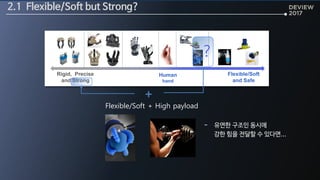
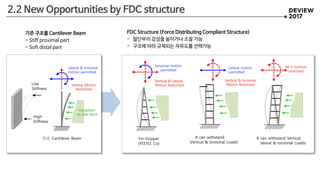
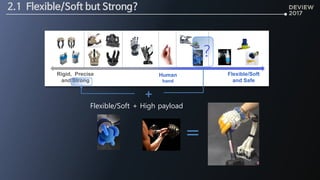

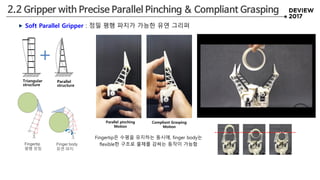
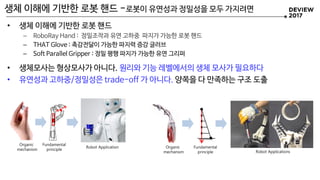











Yong Jae Kim is a professor at KoreaTech who researches wearable, surgical, humanoid and mobile robots. His research interests include mechanism design and control of flexible robots. He has worked at Samsung Electronics and MIT. Some of his projects include a high-DOF robotic hand called RoboRay Hand, a power-assist glove called TATH Glove, and a soft parallel gripper. He aims to design robots with both flexibility and precision, like the human hand. He proposes using tendon-driven and compliant mechanisms inspired by biology to achieve this goal.





















![[231]운영체제 수준에서의 데이터베이스 성능 분석과 최적화](https://cdn.slidesharecdn.com/ss_thumbnails/231-171017003147-thumbnail.jpg?width=640&height=640&fit=bounds)






![[141] 오픈소스를 쓰려는 자, 리베이스의 무게를 견뎌라](https://cdn.slidesharecdn.com/ss_thumbnails/141deview2017-171016055311-thumbnail.jpg?width=640&height=640&fit=bounds)

![[131]chromium binging 기술을 node.js에 적용해보자](https://cdn.slidesharecdn.com/ss_thumbnails/31chromiumbingdingfinal-171015225736-thumbnail.jpg?width=640&height=640&fit=bounds)
![[124]자율주행과 기계학습](https://cdn.slidesharecdn.com/ss_thumbnails/124-171016052833-thumbnail.jpg?width=640&height=640&fit=bounds)
![[141]네이버랩스의 로보틱스 연구 소개](https://cdn.slidesharecdn.com/ss_thumbnails/41-171015225628-thumbnail.jpg?width=640&height=640&fit=bounds)
![[143]알파글래스의 개발과정으로 알아보는 ar 스마트글래스 광학 시스템](https://cdn.slidesharecdn.com/ss_thumbnails/43ar-171016045445-thumbnail.jpg?width=640&height=640&fit=bounds)
![[132]웨일 브라우저 1년 그리고 미래](https://cdn.slidesharecdn.com/ss_thumbnails/321-171016021602-thumbnail.jpg?width=640&height=640&fit=bounds)
![[111]open, share, enjoy 네이버의 오픈소스 활동](https://cdn.slidesharecdn.com/ss_thumbnails/11openshareenjoy-171016004935-thumbnail.jpg?width=640&height=640&fit=bounds)

![[112]clova platform 인공지능을 엮는 기술](https://cdn.slidesharecdn.com/ss_thumbnails/12clovaplatform-171016022611-thumbnail.jpg?width=640&height=640&fit=bounds)
![[123]동네 커피샵도 사이렌 오더를 쓸 수 있을까](https://cdn.slidesharecdn.com/ss_thumbnails/23-171016044352-thumbnail.jpg?width=640&height=640&fit=bounds)


![[113]how can realm_make_efficient_mobile_database](https://cdn.slidesharecdn.com/ss_thumbnails/13howcanrealmmakeefficientmobiledatabase2-171016050029-thumbnail.jpg?width=640&height=640&fit=bounds)
![[135] 오픈소스 데이터베이스, 은행 서비스에 첫발을 내밀다.](https://cdn.slidesharecdn.com/ss_thumbnails/35-171016061446-thumbnail.jpg?width=640&height=640&fit=bounds)
![[125] 머신러닝으로 쏟아지는 유저 cs 답변하기](https://cdn.slidesharecdn.com/ss_thumbnails/25cs-171016061055-thumbnail.jpg?width=640&height=640&fit=bounds)
![[115]14일만에 깃헙 스타 1,000개 받은 차트 오픈소스 개발기](https://cdn.slidesharecdn.com/ss_thumbnails/15141000-171016060341-thumbnail.jpg?width=640&height=640&fit=bounds)
![[213]building ai to recreate our visual world](https://cdn.slidesharecdn.com/ss_thumbnails/213buildingaitorecreateourvisualworld-171017023224-thumbnail.jpg?width=640&height=640&fit=bounds)
![[241]large scale search with polysemous codes](https://cdn.slidesharecdn.com/ss_thumbnails/241large-scalesearchwithpolysemouscodes-171017003327-thumbnail.jpg?width=640&height=640&fit=bounds)
![[222]neural machine translation (nmt) 동작의 시각화 및 분석 방법](https://cdn.slidesharecdn.com/ss_thumbnails/222neuralmachinetranslationnmt-171016102621-thumbnail.jpg?width=640&height=640&fit=bounds)





![[Skolkovo Robotics V] Robotics in Korea](https://cdn.slidesharecdn.com/ss_thumbnails/roboticsinkorea-170422182747-thumbnail.jpg?width=640&height=640&fit=bounds)
![[한국포스트휴먼학회 창립기념 공개강연회 l KAIST 휴머노이드로봇센터 오준호 교수] Robot Technology and the future](https://cdn.slidesharecdn.com/ss_thumbnails/150918robottechnologyandthefuture-150923023612-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)


![[전문가 발표] 하지 외골격 로봇 (김완수 박사)](https://cdn.slidesharecdn.com/ss_thumbnails/20150703kosrobotexo2-150810054007-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)










![[211] 인공지능이 인공지능 챗봇을 만든다](https://cdn.slidesharecdn.com/ss_thumbnails/211chatbot-181106094835-thumbnail.jpg?width=640&height=640&fit=bounds)
![[233] 대형 컨테이너 클러스터에서의 고가용성 Network Load Balancing: Maglev Hashing Scheduler i...](https://cdn.slidesharecdn.com/ss_thumbnails/233networkloadbalancing-181018151852-thumbnail.jpg?width=640&height=640&fit=bounds)
![[215] Druid로 쉽고 빠르게 데이터 분석하기](https://cdn.slidesharecdn.com/ss_thumbnails/215druid-181012071910-thumbnail.jpg?width=640&height=640&fit=bounds)
![[245]Papago Internals: 모델분석과 응용기술 개발](https://cdn.slidesharecdn.com/ss_thumbnails/245papagointernals1-181012045005-thumbnail.jpg?width=640&height=640&fit=bounds)
![[236] 스트림 저장소 최적화 이야기: 아파치 드루이드로부터 얻은 교훈](https://cdn.slidesharecdn.com/ss_thumbnails/236deview2018jihoonson-final-181012031726-thumbnail.jpg?width=640&height=640&fit=bounds)
![[235]Wikipedia-scale Q&A](https://cdn.slidesharecdn.com/ss_thumbnails/235deview2018julienperezwikipediaqa12oct2018-181012030613-thumbnail.jpg?width=640&height=640&fit=bounds)
![[244]로봇이 현실 세계에 대해 학습하도록 만들기](https://cdn.slidesharecdn.com/ss_thumbnails/244deview2018tomisilanderrobotsrealworldfinal11oct2018-181012024720-thumbnail.jpg?width=640&height=640&fit=bounds)
![[243] Deep Learning to help student’s Deep Learning](https://cdn.slidesharecdn.com/ss_thumbnails/243deeplearningtohelpstudentsdeeplearning-181012024530-thumbnail.jpg?width=640&height=640&fit=bounds)
![[234]Fast & Accurate Data Annotation Pipeline for AI applications](https://cdn.slidesharecdn.com/ss_thumbnails/234fastaccuratedataannotationpipelineforaiapplications1-181012024230-thumbnail.jpg?width=640&height=640&fit=bounds)
![Old version: [233]대형 컨테이너 클러스터에서의 고가용성 Network Load Balancing](https://cdn.slidesharecdn.com/ss_thumbnails/233largecontainerclusternetworkloadbalancing-181012024225-thumbnail.jpg?width=640&height=640&fit=bounds)
![[226]NAVER 광고 deep click prediction: 모델링부터 서빙까지](https://cdn.slidesharecdn.com/ss_thumbnails/226naveraddeepclickprediction-181012024116-thumbnail.jpg?width=640&height=640&fit=bounds)
![[225]NSML: 머신러닝 플랫폼 서비스하기 & 모델 튜닝 자동화하기](https://cdn.slidesharecdn.com/ss_thumbnails/225nsmlmachinelearningntuningautomize-181012023407-thumbnail.jpg?width=640&height=640&fit=bounds)
![[224]네이버 검색과 개인화](https://cdn.slidesharecdn.com/ss_thumbnails/224naversearchnpersonalizationfinal-181012022631-thumbnail.jpg?width=640&height=640&fit=bounds)
![[216]Search Reliability Engineering (부제: 지진에도 흔들리지 않는 네이버 검색시스템)](https://cdn.slidesharecdn.com/ss_thumbnails/216sresearchreliabilityengineering-181012022623-thumbnail.jpg?width=640&height=640&fit=bounds)
![[214] Ai Serving Platform: 하루 수 억 건의 인퍼런스를 처리하기 위한 고군분투기](https://cdn.slidesharecdn.com/ss_thumbnails/214aiservingplatforminference-181012022603-thumbnail.jpg?width=640&height=640&fit=bounds)
![[213] Fashion Visual Search](https://cdn.slidesharecdn.com/ss_thumbnails/213fashionvisualsearchreduced-181012022540-thumbnail.jpg?width=640&height=640&fit=bounds)
![[232] TensorRT를 활용한 딥러닝 Inference 최적화](https://cdn.slidesharecdn.com/ss_thumbnails/232dlinferenceoptimizationusingtensorrt1-181012014455-thumbnail.jpg?width=640&height=640&fit=bounds)
![[242]컴퓨터 비전을 이용한 실내 지도 자동 업데이트 방법: 딥러닝을 통한 POI 변화 탐지](https://cdn.slidesharecdn.com/ss_thumbnails/242pcdpublic-181012011734-thumbnail.jpg?width=640&height=640&fit=bounds)
![[212]C3, 데이터 처리에서 서빙까지 가능한 하둡 클러스터](https://cdn.slidesharecdn.com/ss_thumbnails/212c3-181012011644-thumbnail.jpg?width=640&height=640&fit=bounds)
![[223]기계독해 QA: 검색인가, NLP인가?](https://cdn.slidesharecdn.com/ss_thumbnails/2232018-181012010149-thumbnail.jpg?width=640&height=640&fit=bounds)



















