Downloaded 82 times

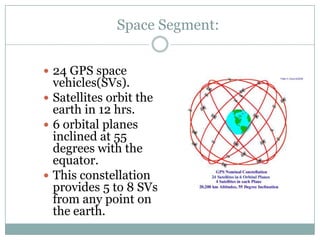
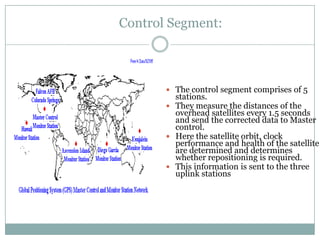

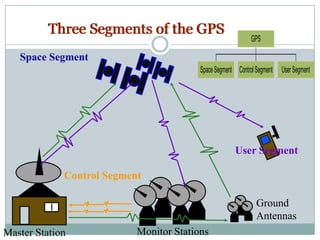

The document discusses the global positioning system (GPS) and how it has changed navigation worldwide. It provides details on the three segments of GPS - the space segment consisting of 24 satellites in orbit, the control segment of 5 ground stations that monitor the satellites, and the user segment of GPS receivers. GPS uses trilateration of radio signals from satellites to determine precise location and timing information for users. Its widespread applications now include navigation, tracking, mapping, and more.













































![GPS[Global Positioning System]](https://cdn.slidesharecdn.com/ss_thumbnails/globalpositioningsystem-130707095218-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)





















