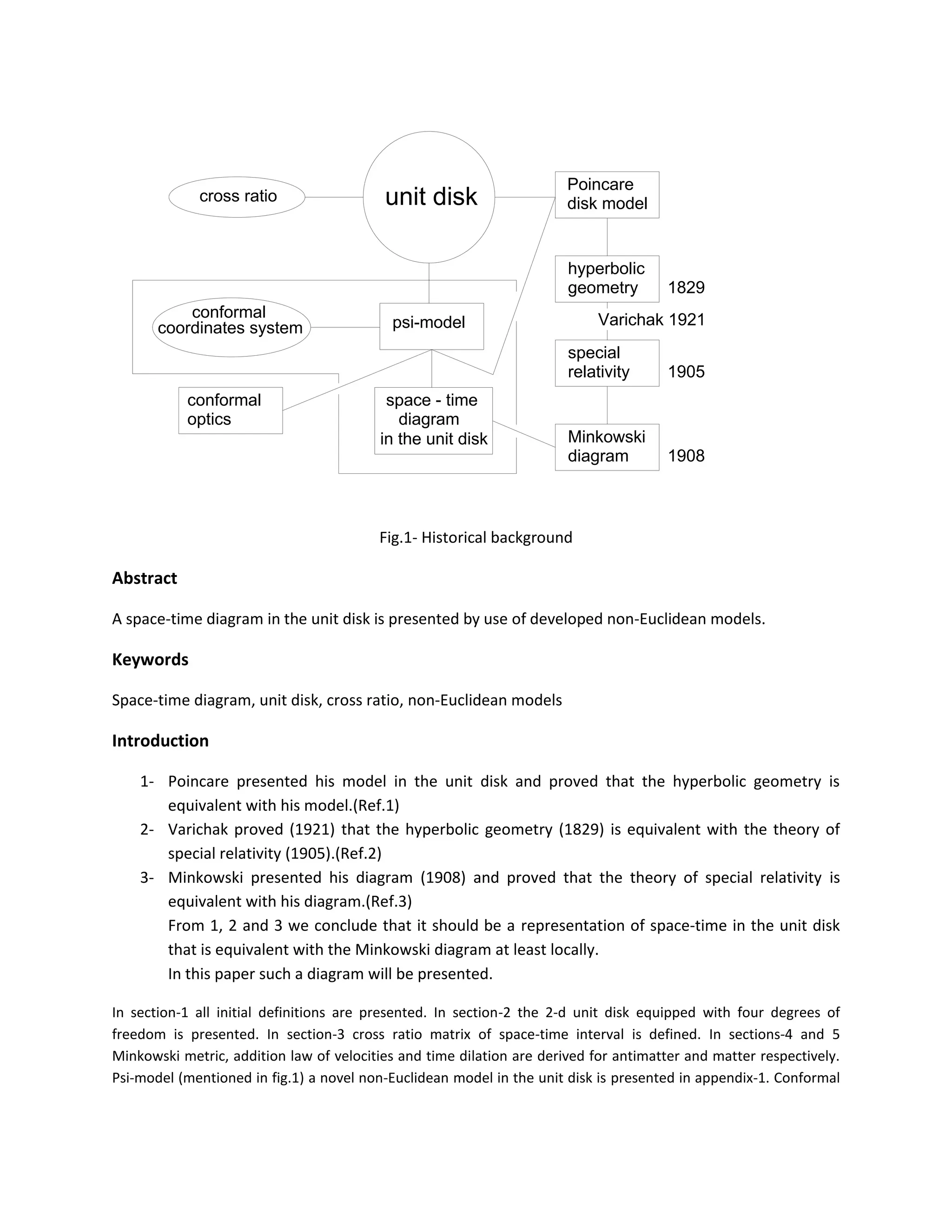
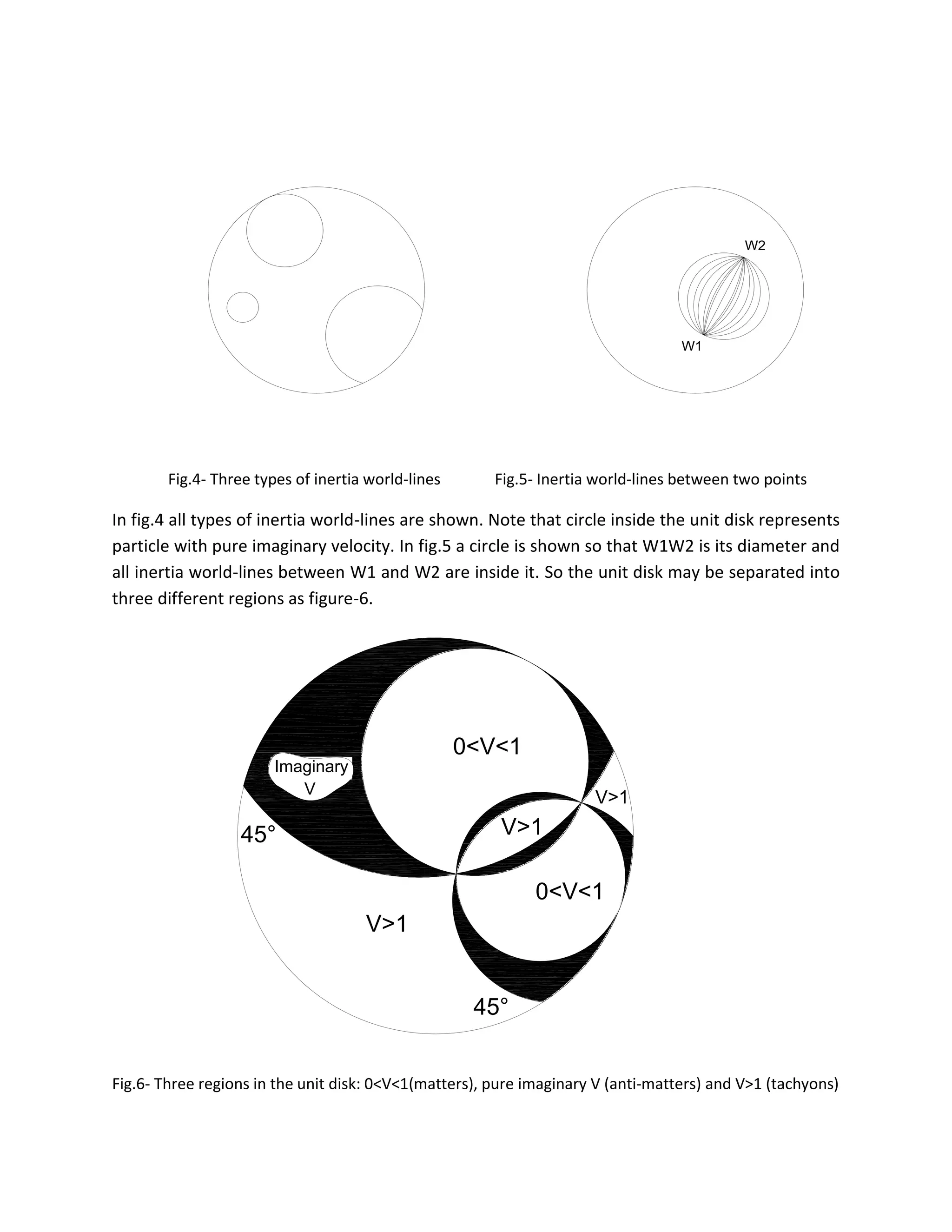
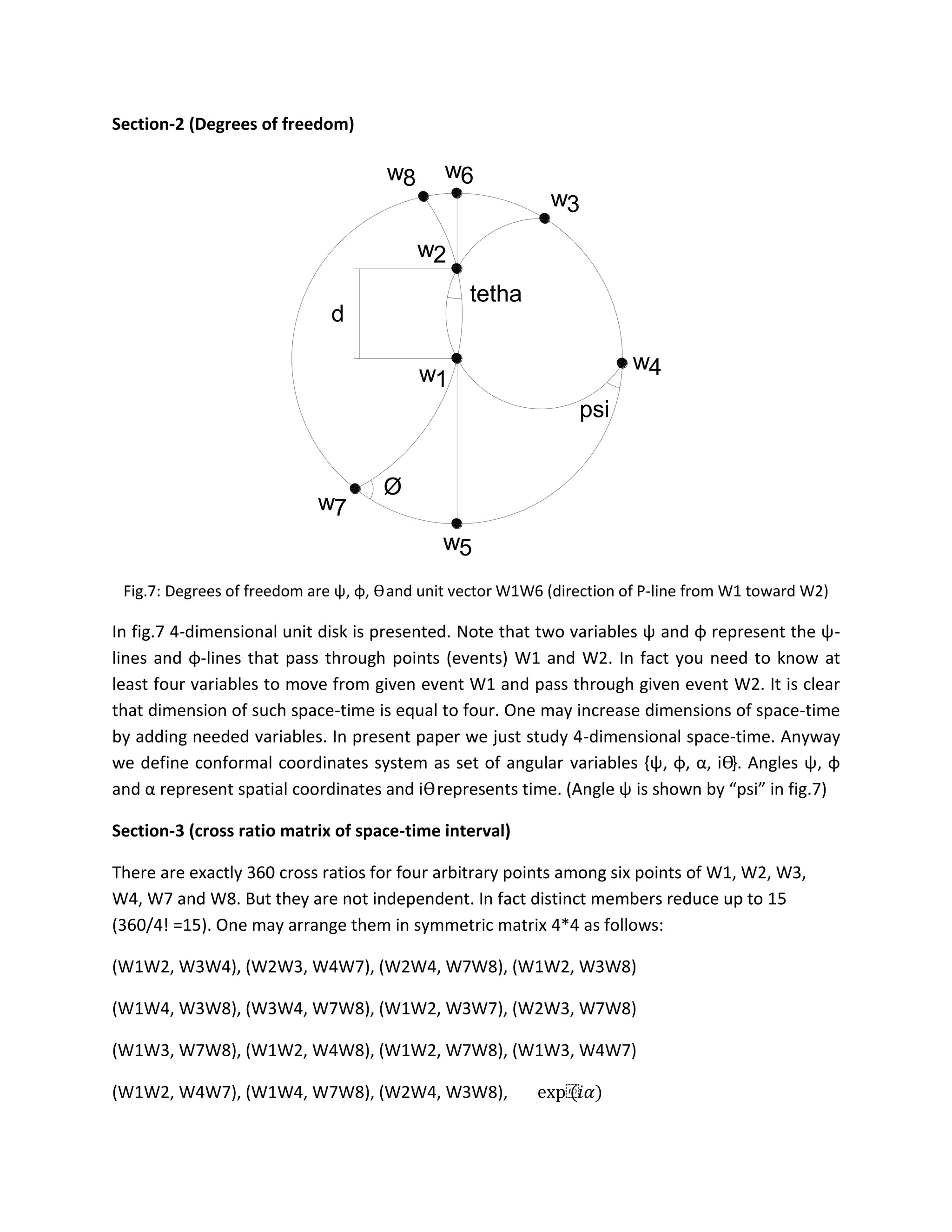
This document presents a space-time diagram in the unit disk that represents events, worldlines, and inertial motion in a 4-dimensional space-time. It defines variables to represent spatial and temporal intervals between events using cross ratios and angles in the disk. Calculations show that locally, this representation satisfies the Minkowski metric and derives the velocity addition law and time dilation formula. The diagram separates space-time into regions for matter, antimatter, and tachyons. Appendices introduce related non-Euclidean models and an application to conformal optics.
![Where “α” represents direction of Poincare-line from W1 toward W2
Cross ratio matrix Ϯmay be divided in two symmetric matrices as follows:
Amplitude matrix Ϯ𝐴 = 𝐴𝑏𝑠𝑜𝑙𝑢𝑡𝑒 𝑊𝑖 𝑊𝑗 , 𝑊𝑝 𝑊𝑞 = 𝐴𝑏𝑠[
WiWp
W𝑗W𝑝
WjWq
W𝑖W𝑞
] 2
Phase matrix Ϯ𝑃 =
( 𝑊 𝑖 𝑊 𝑗 ,𝑊𝑝 𝑊𝑞 )
𝐴𝑏𝑠𝑜𝑙𝑢𝑡𝑒( 𝑊 𝑖 𝑊 𝑗 ,𝑊𝑝 𝑊𝑞 )
3
Simple calculations yield:
Ϯ𝑃 1,1 = 1 Ϯ𝑃 1,1 = 𝑒 𝑖𝜓
Ϯ𝑃 1,1 = 𝑒 𝑖𝜑
Ϯ𝑃 1,1 = 𝑒 𝑖𝛳
Ϯ𝑃 1,1 = 𝑒 𝑖𝜓
Ϯ𝑃 1,1 = 1 Ϯ𝑃 1,1 = 𝑒 𝑖𝛳
Ϯ𝑃 1,1 = 𝑒 𝑖𝜑
Ϯ𝑃 1,1 = 𝑒 𝑖𝜑
Ϯ𝑃 1,1 = 𝑒 𝑖𝛳
Ϯ𝑃 1,1 = 1 Ϯ𝑃 1,1 = 𝑒 𝑖𝜓
Ϯ𝑃 1,1 = 𝑒 𝑖𝛳
Ϯ𝑃 1,1 = 𝑒 𝑖𝜑
Ϯ𝑃 1,1 = 𝑒 𝑖𝜓
Ϯ𝑃 1,1 = 𝑒 𝑖𝛼
Fig.8: Symmetric 4*4 phase matrix of cross ratio
Calculations of amplitude matrix are more complicated. Referring to fig.7 results are as follows:
Ϯ𝐴 1,1 =
1−𝑡𝑎𝑛 𝜓 𝑡𝑎𝑛 (𝑑 𝑐𝑜𝑠 𝜓)
1+𝑡𝑎𝑛 𝜓 𝑡𝑎𝑛 (𝑑 𝑐𝑜𝑠 𝜓)
4
Ϯ𝐴 3,3 =
1−𝑡𝑎𝑛 𝜑 𝑡𝑎𝑛 (𝑑 𝑐𝑜𝑠 𝜑)
1+𝑡𝑎𝑛 𝜑 𝑡𝑎𝑛 (𝑑 𝑐𝑜𝑠 𝜑)
5
ϮA 4,4 = 1 6
Ϯ𝐴 2,2 = W3W4, W7W8 = (
W3W7
W3W8
)(
W4W8
W4W7
) 7
W3W7 =
2 1 − cos 𝜓 cos 𝜑{ 1 − 𝑑2 (cos 𝜓)2 tan 𝜓 + 𝑑 cos 𝜓 1 − 𝑑2 (cos 𝜑)2 tan 𝜑 + 𝑑 cos 𝜑 + 1 − 𝑑2 (cos 𝜓)2 − 𝑑 sin 𝜓 1 − 𝑑2 (cos 𝜑)2 − 𝑑 sin 𝜑 }
W3W8 =
2 1 − cos 𝜓 cos 𝜑{ 1 − 𝑑2 (cos 𝜓)2 tan 𝜓 + 𝑑 cos 𝜓 1 − 𝑑2 (cos 𝜑)2 tan 𝜑 + 𝑑 cos 𝜑 − 1 − 𝑑2 (cos 𝜓)2 − 𝑑 sin 𝜓 1 − 𝑑2 (cos 𝜑)2 − 𝑑 sin 𝜑 }
lim 𝑑→0 Ϯ𝐴 2,2 = [
cos (
𝜓−𝜑
2
)
cos (
𝜓+𝜑
2
)
]2
8
limd→0 ϮA 1,1 = 1 − 2d sin ψ
tan β
β
, β = d cos ψ 9](https://image.slidesharecdn.com/e135cc12-ac44-439c-b807-020cf54e2aeb-150407013652-conversion-gate01/75/space-time-diagram-final-6-2048.jpg)
![W2W3 =
cos (ψ+d cos ψ)
cos ψ
10
W2W4 =
cos (ψ−d cos ψ)
cos ψ
11
W2W7 =
cos (φ−d cos φ)
cos φ
12
W2W8 =
cos (φ+d cos φ)
cos φ
13
ϴ = ϴ1 + ϴ2 , (sin ϴ1/2 = d cos ψ), (sin ϴ2/2 = d cos φ) 14
Section-4 (space interval and time interval)
The most important part of this paper is defining time and spatial intervals correctly. In addition
any model of 4-dimensional space-time in the unit disk must have Minkowski metric locally.
4-1) time interval Δt
Let define time interval Δt between events W1 and W2 as follows:
Δt = iϴ 15
Where ϴ represents intersection angle of ψ-line with φ-line pass through events 𝑊1 and 𝑊2
i = −1
Let assume that variables are time “t” and angle “ψ”. So for small enough “d” we have:
Δt = 2id cos 𝜓 16
Where “d” represents Euclidean distance between W1 and W2 (without any restriction W1 is
located at the center of the unit disk)
And “ψ” represents cut angle between the unit disk and ψ-lines path through W1 and W2.
Note that exactly two ψ-lines path through W1 and W2.
4-2) spatial interval Δσ
Let define spatial interval Δσ between events W1 and W2 as follows:
Δσ = − log[ Ϯ𝐴 1,1 ] = −log(
1−𝑡𝑎𝑛 𝜓 𝑡𝑎𝑛 (d 𝑐𝑜𝑠 𝜓)
1+𝑡𝑎𝑛 𝜓 𝑡𝑎𝑛 (d 𝑐𝑜𝑠 𝜓)
) 17](https://image.slidesharecdn.com/e135cc12-ac44-439c-b807-020cf54e2aeb-150407013652-conversion-gate01/75/space-time-diagram-final-7-2048.jpg)