Download to read offline

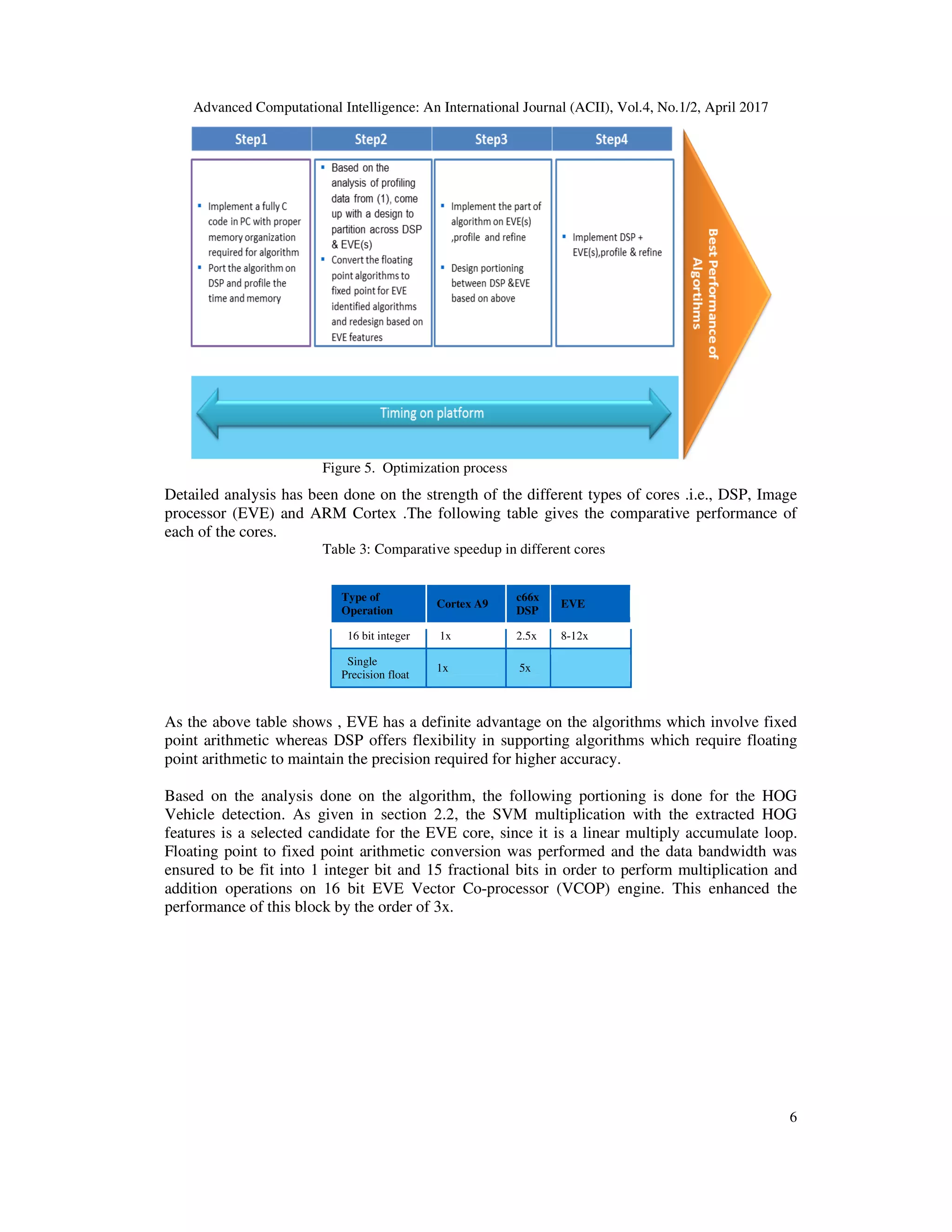
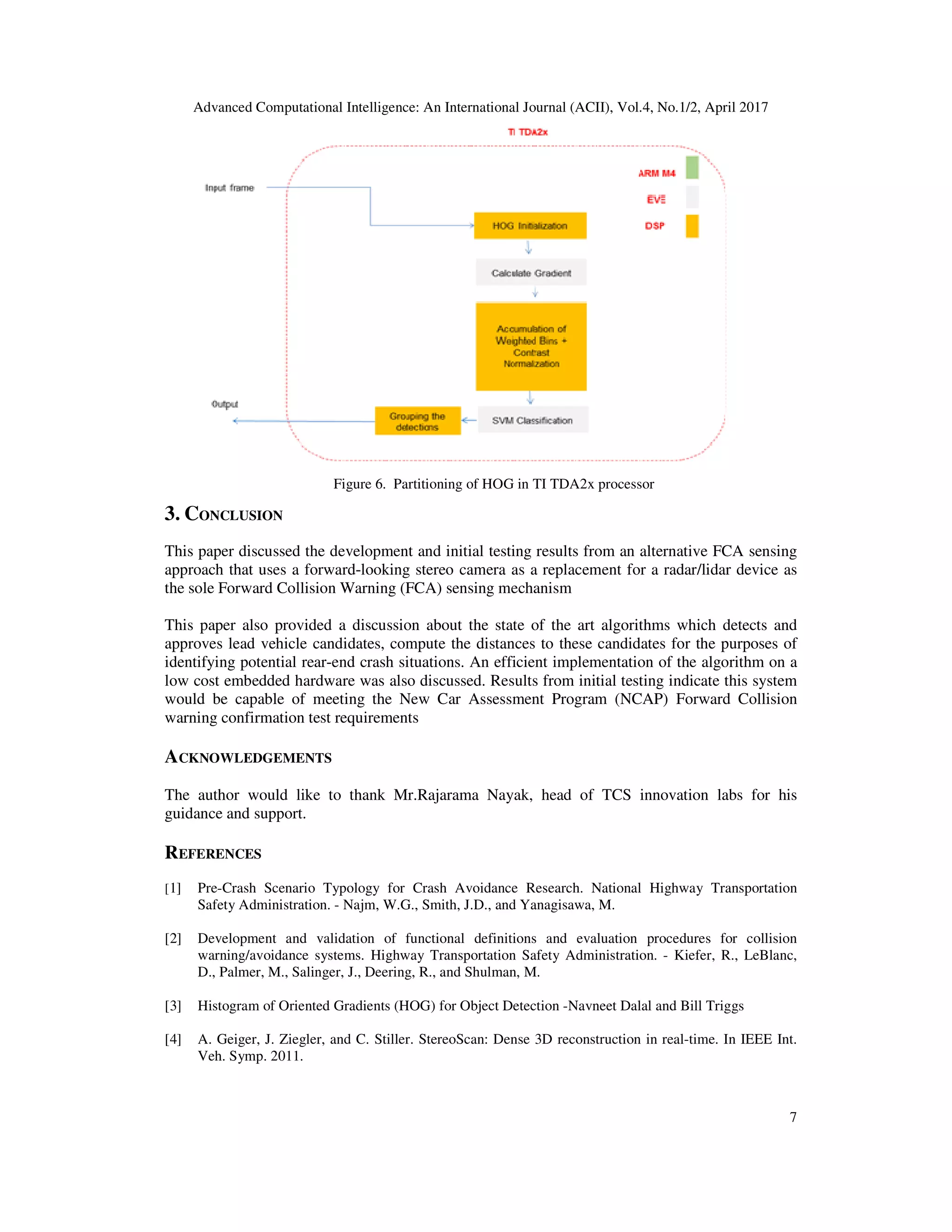

This document discusses the development of an efficient system for forward collision avoidance in autonomous vehicles using a low-cost camera and embedded processor. It proposes algorithms for vehicle detection using HOG features and SVM classification, as well as distance estimation using structure from motion. The algorithms are designed to achieve real-time performance on low-cost embedded CPUs with DSP and vector processing cores. Initial testing results indicate the system meets requirements for forward collision warning. The document also discusses optimizing the algorithms for implementation on a Texas Instruments TDA2x embedded processor.