
Recommended
More Related Content
What's hot
What's hot (20)
Similar to Serial Communication Protocols Simplified
Similar to Serial Communication Protocols Simplified (20)
Serial Communication Protocols Simplified
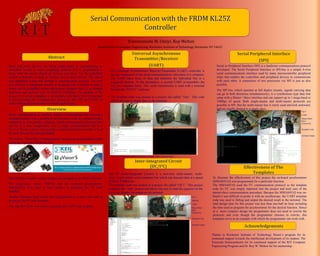
- 1. Abstract More and more devices are being made smart by incorporating an embedded system: a small computing platform that is programmed to know what the device should do without user input. For the embedded system to function, it needs to monitor one or more sensors. The sensor and embedded system talk through a communication protocol. For each new protocol, a significant amount of designing time is needed to make a sensor and an embedded system talk because designers have to go through datasheets and perform tests of different conditions. The purpose of the project is to set-up a template or an example code that is used to interface to devices using the communication protocols: SPI, I2C and UART to reduce designing process time for future applications. Serial communication is common method of transmitting data between a computer(master) and a peripheral device(slave) such as a programmable instrument or even another computer. Serial communication transmits data one bit at a time, sequentially, over a single communication line to a receiver. Serial is also a most popular communication protocol that is used by many devices for instrumentation. The project “Serial Bus Communication” focuses on an embedded system called the Freescale FRDM-KL25Z. Fig 1: Freescale Freedom Board, TMP102, MMA8451Q The software complier used to compose the template is the KEIL uVision5. The temperature sensor, TMP102 and the on-board accelerometer, MMA8451Q were used as slave devices to prototype the I2C code template. Another Freedom Scale board was programmed as a slave and used to prototype the SPI code template. The chip MA3238C was used to prototype the UART code template. Eronmonsele M. Omiyi, Roy Melton A/D Conversion, PWM, and Servos: An HCS12 Assembly Language Programming Exercise Department of Computer Engineering, Rochester Institute of Technology, Rochester, NY 14623 Universal Asynchronous Transmitter/Receiver (UART) The Universal Asynchronous Receiver/Transmitter (UART) controller is the key component of the serial communications subsystem of a computer. The UART takes bytes of data and transmits the individual bits in a sequential fashion. At the destination, a second UART re-assembles the bits into complete bytes. This serial transmission is used with a terminal through the “PuTTY” software. The template code was created as a project file called “Tem.” This code allows the user to output data on the terminal. Inter-Integrated Circuit (IIC/I2C) Acknowledgements Thanks to Rochester Institute of Technology Honor’s program for its continued support towards the intellectual development of its student; The Freescale Semiconductor for its continued support of the RIT Computer Engineering Program and Dr. Roy W. Melton for his mentorship. Effectiveness of The Templates Serial Peripheral Interface (SPI) Serial to Peripheral Interface (SPI) is a hardware communications protocol developed. The Serial Peripheral Interface or SPI-bus is a simple 4-wire serial communications interface used by many microcontroller peripheral chips that enables the controllers and peripheral devices to communicate with each other. A connection of two processors via SPI is just as also possible. The SPI bus, which operates at full duplex (means, signals carrying data can go in both directions simultaneously), is a synchronous type data link setup with a Master / Slave interface and can support up to 1 mega-baud or 10Mbps of speed. Both single-master and multi-master protocols are possible in SPI. But the multi-master bus is rarely used and look awkward, and are usually limited to a single slave. The I²C (Inter-Integrated Circuit) is a two-wire multi-master, multi- slave, single-ended, serial computer bus which can transmit data at a speed of about 3.4Mbit/sec. The template code was created as a project file called “I2C1.” This project combines the “Tem” project and allows the user to read the registers on the slave and display the output on the terminal. Serial Communication with the FRDM KL25Z Controller Overview To illustrate the effectiveness of this project the on-board accelerometer (MMA8451Q) was programmed for a particular function. The MMA8451Q used the I2C communication protocol so the template code for I2C was simply imported into the project and took care of the master-slave communication procedure. Because the MMA8451Q was on- board it was difficult to probe it with an oscilloscope, the UART template code was used to Debug and output the desired result to the terminal. The total design time for this project was less than one-half an hour including the time used to program the accelerometer for the desired function. Hence in a more complex design the programmer does not need to rewrite the protocols and even though the programmer chooses to rewrite, this templates serve as an example with which the programmer can work with. Fig 2: UART port, Master-Slave Connection, Template Code, Terminal Output Fig 3: TMP102, UART, Master-Multi Slave Connection, Template Code, Terminal Output Fig 4: UART, Master-Multi Slave Connection, Template Code, Terminal Output