Download as PDF, PPTX


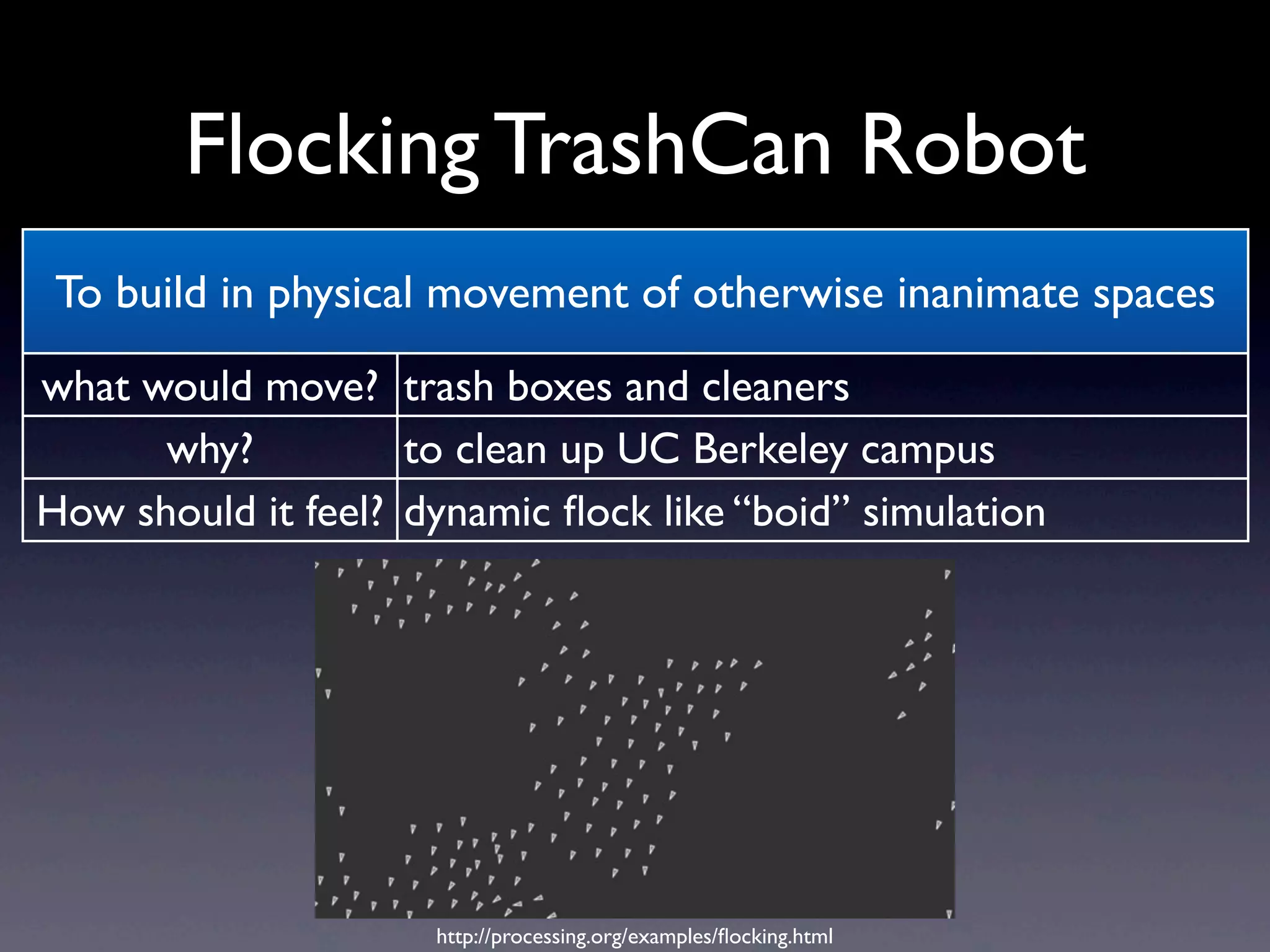
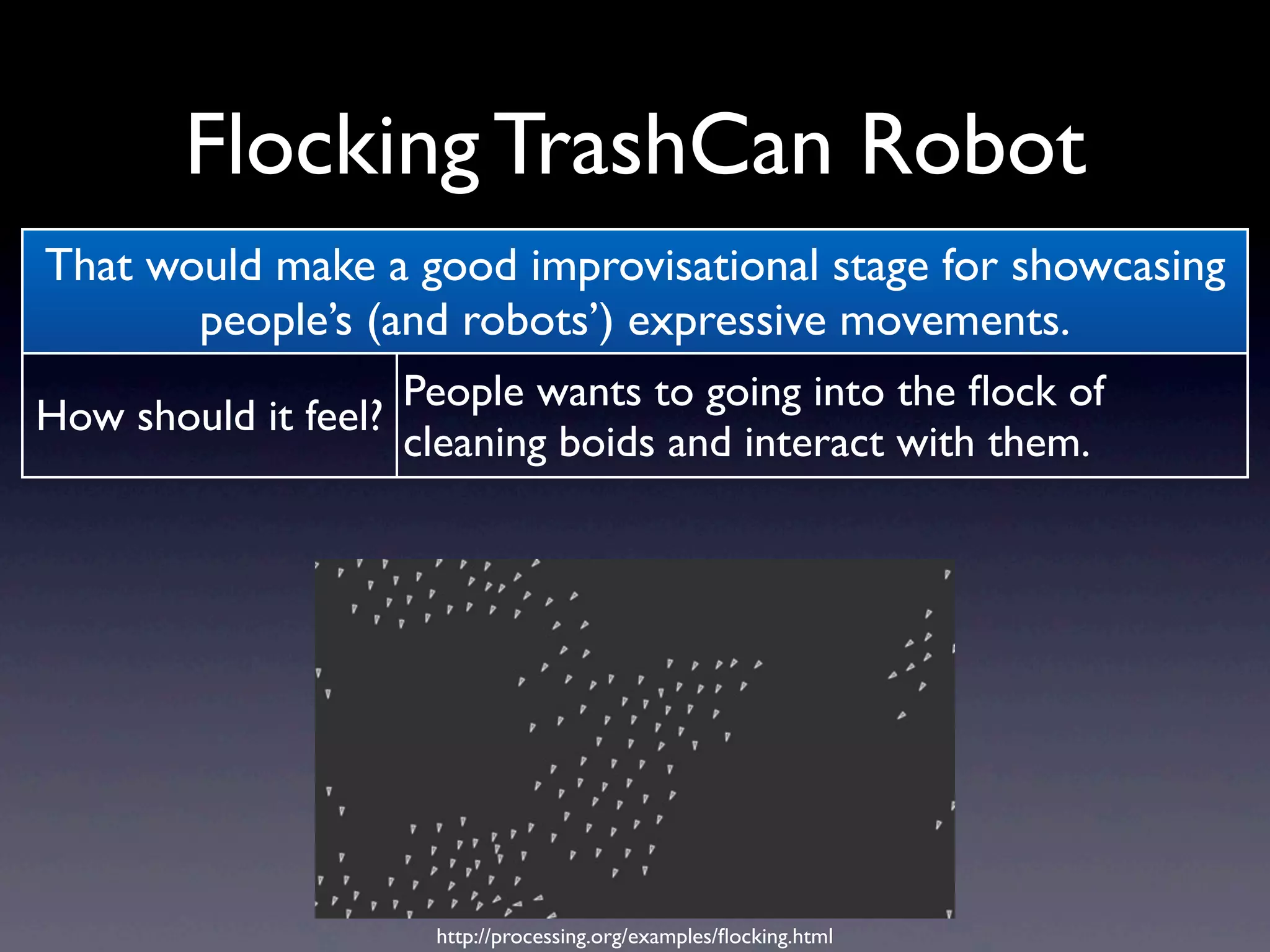
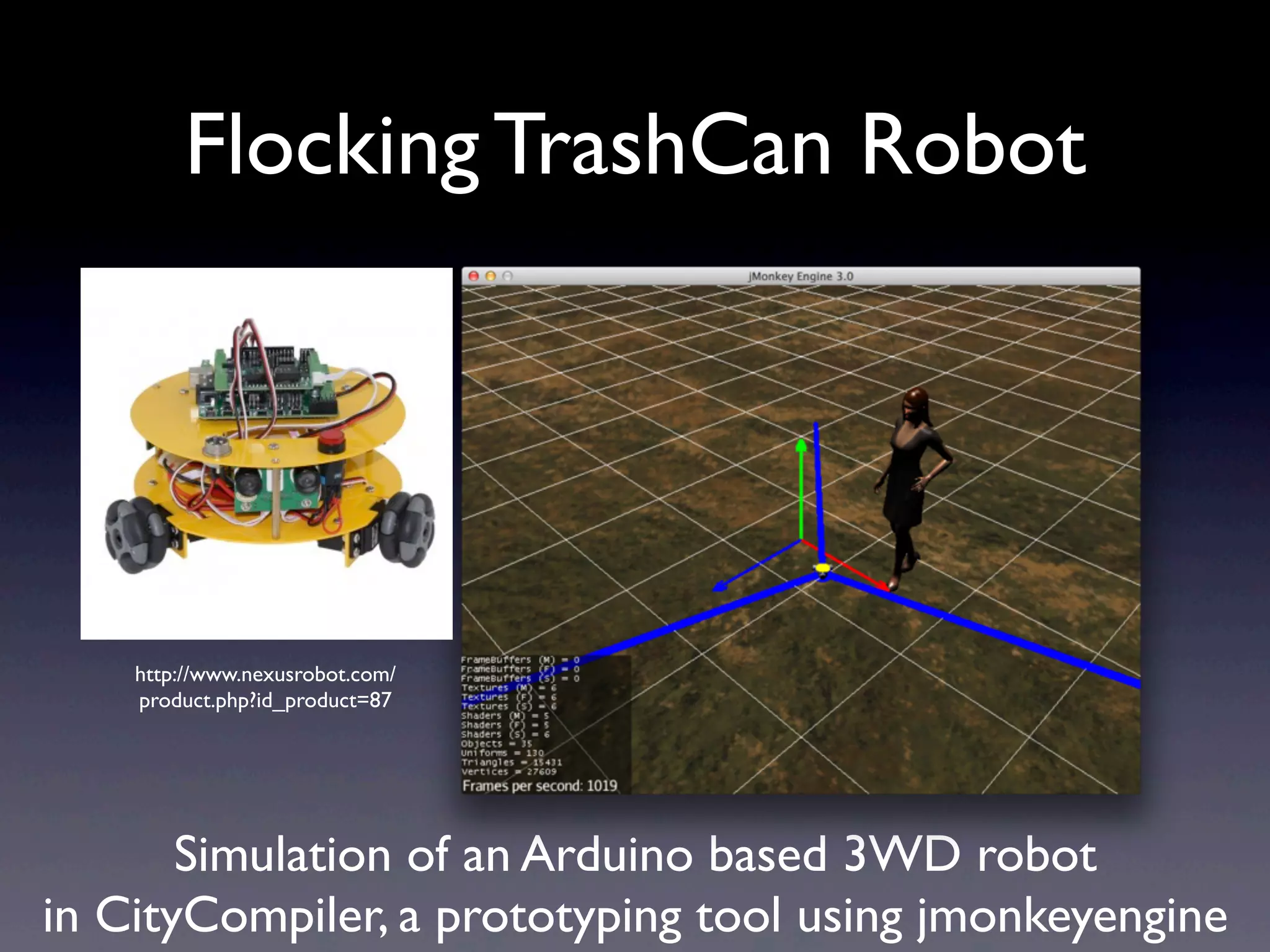
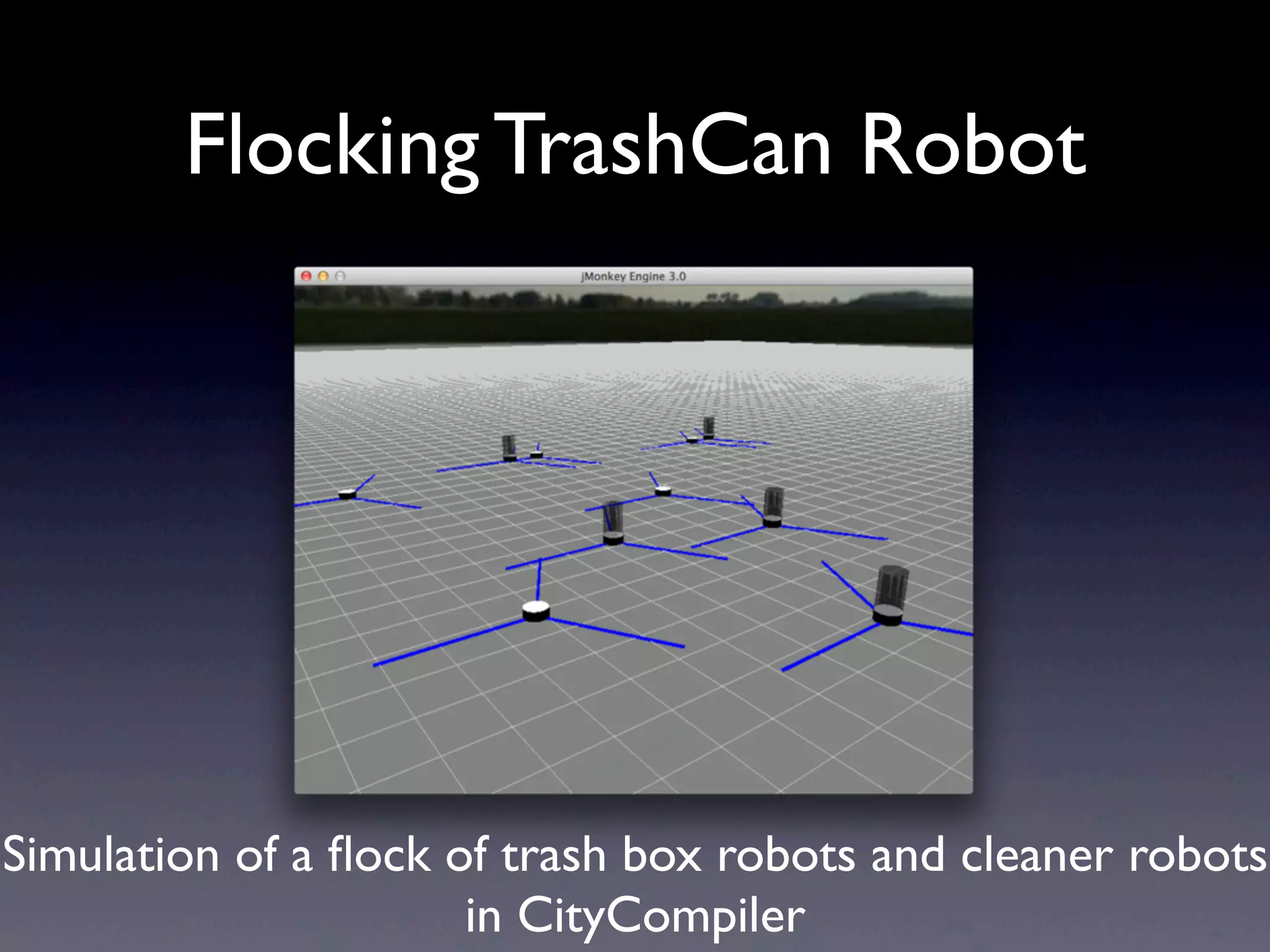
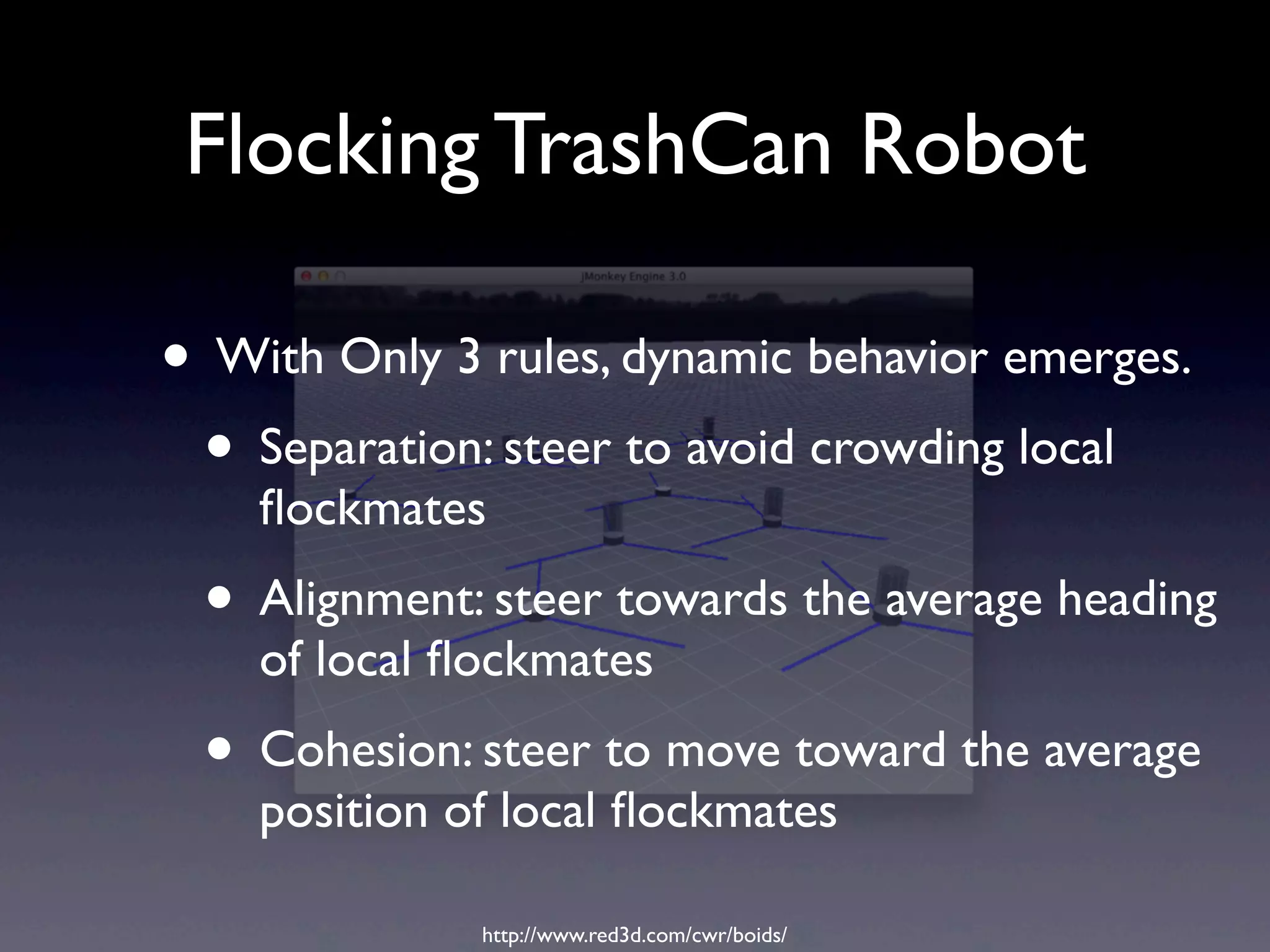
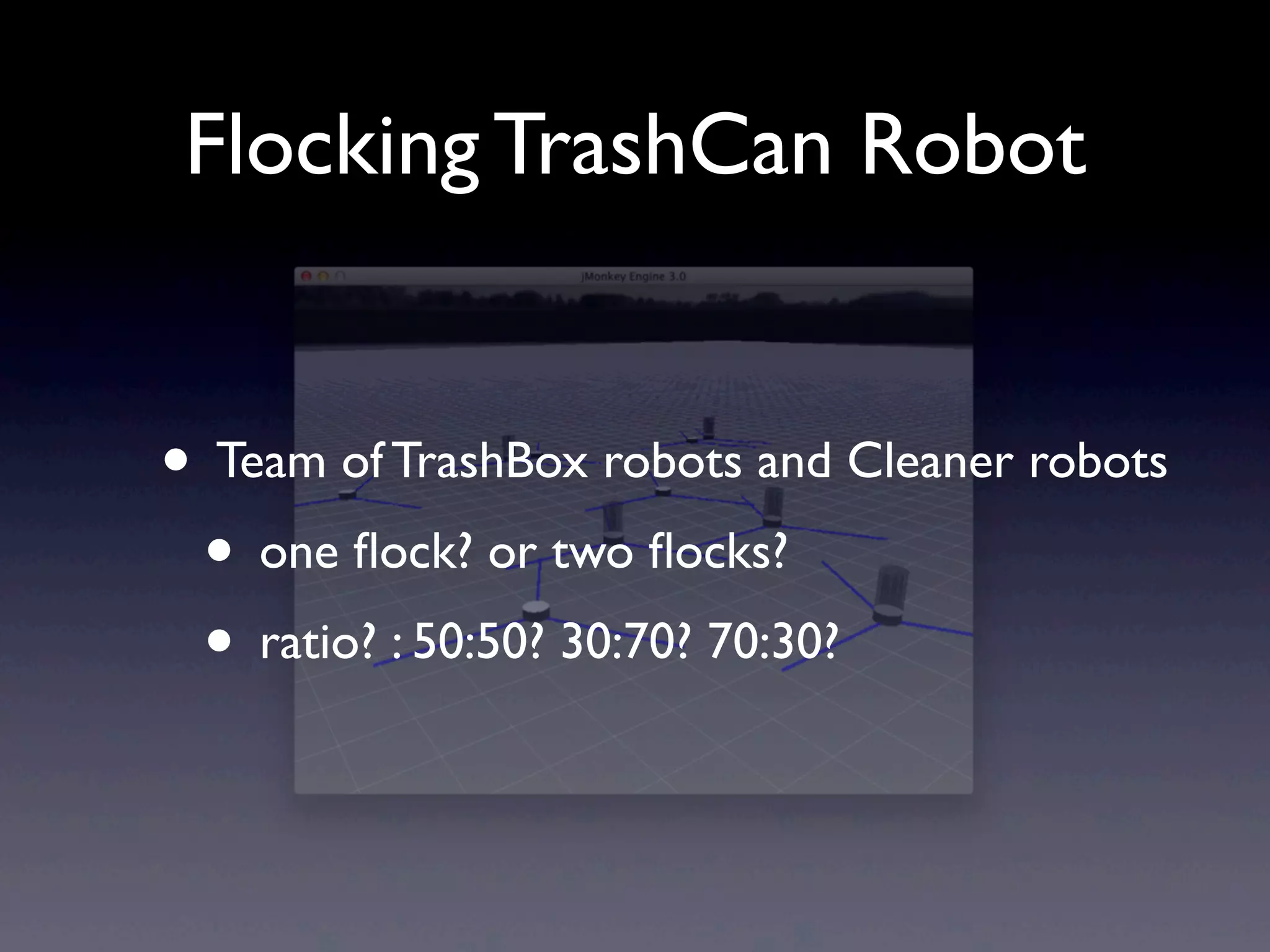
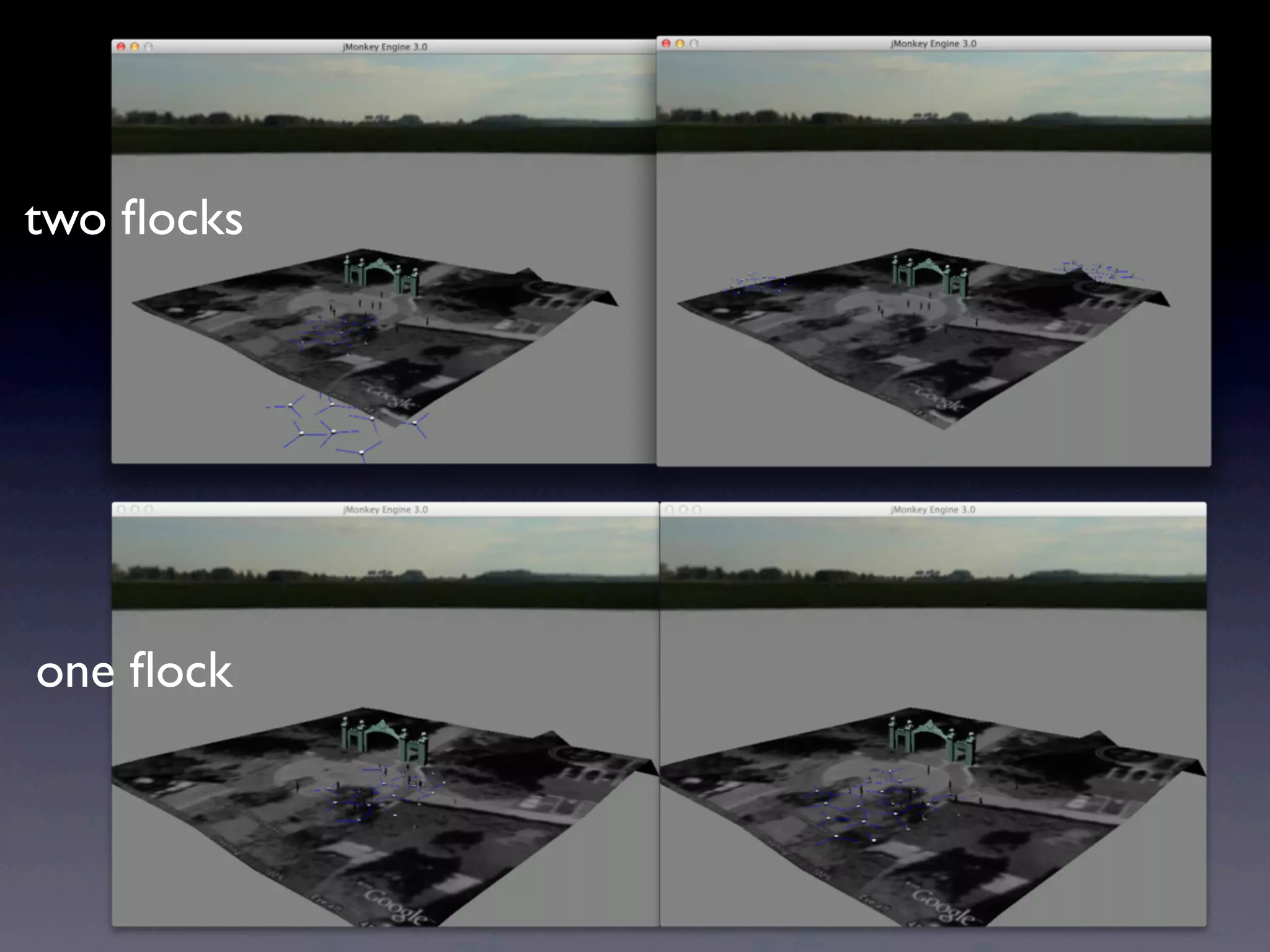
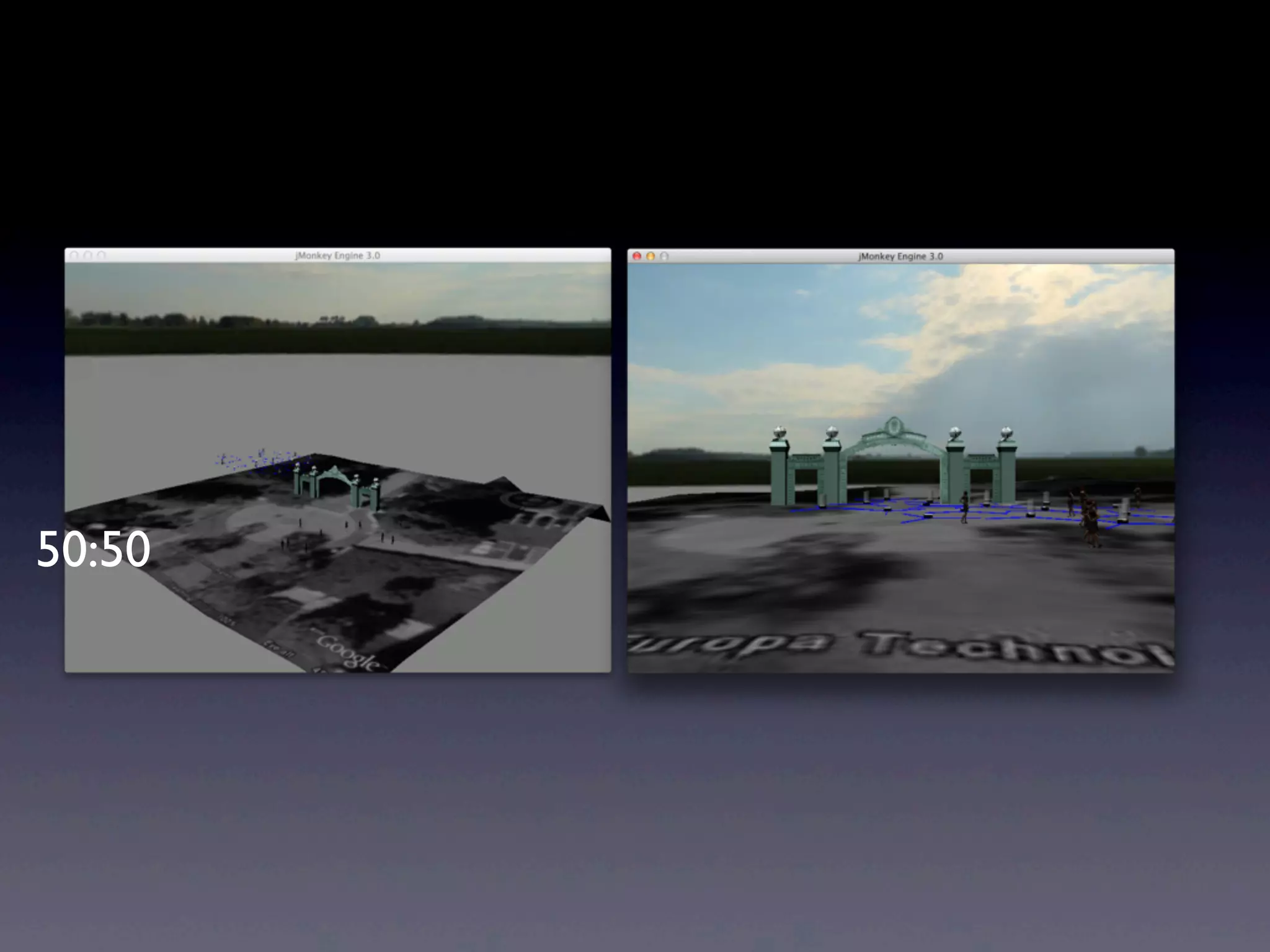
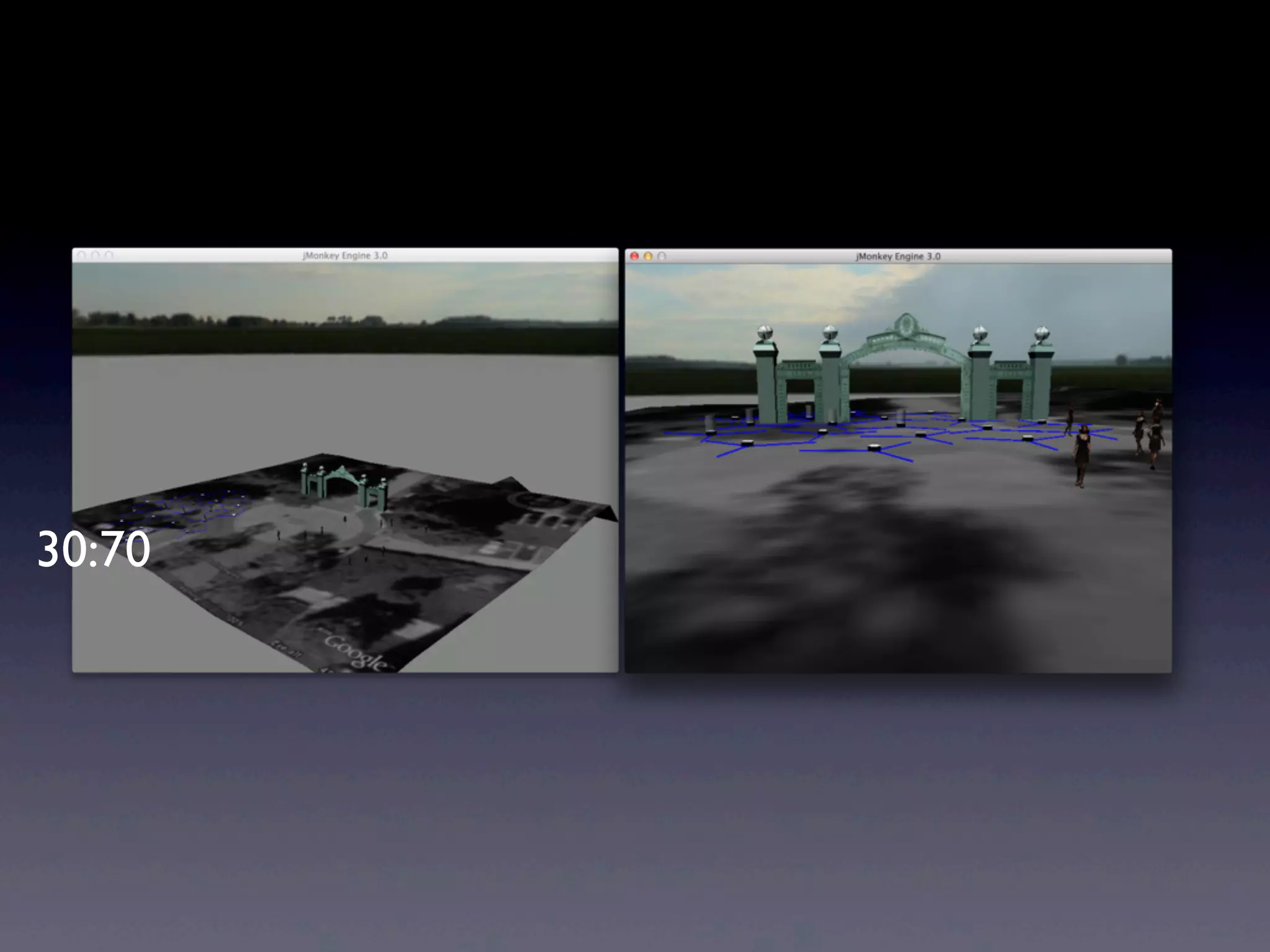
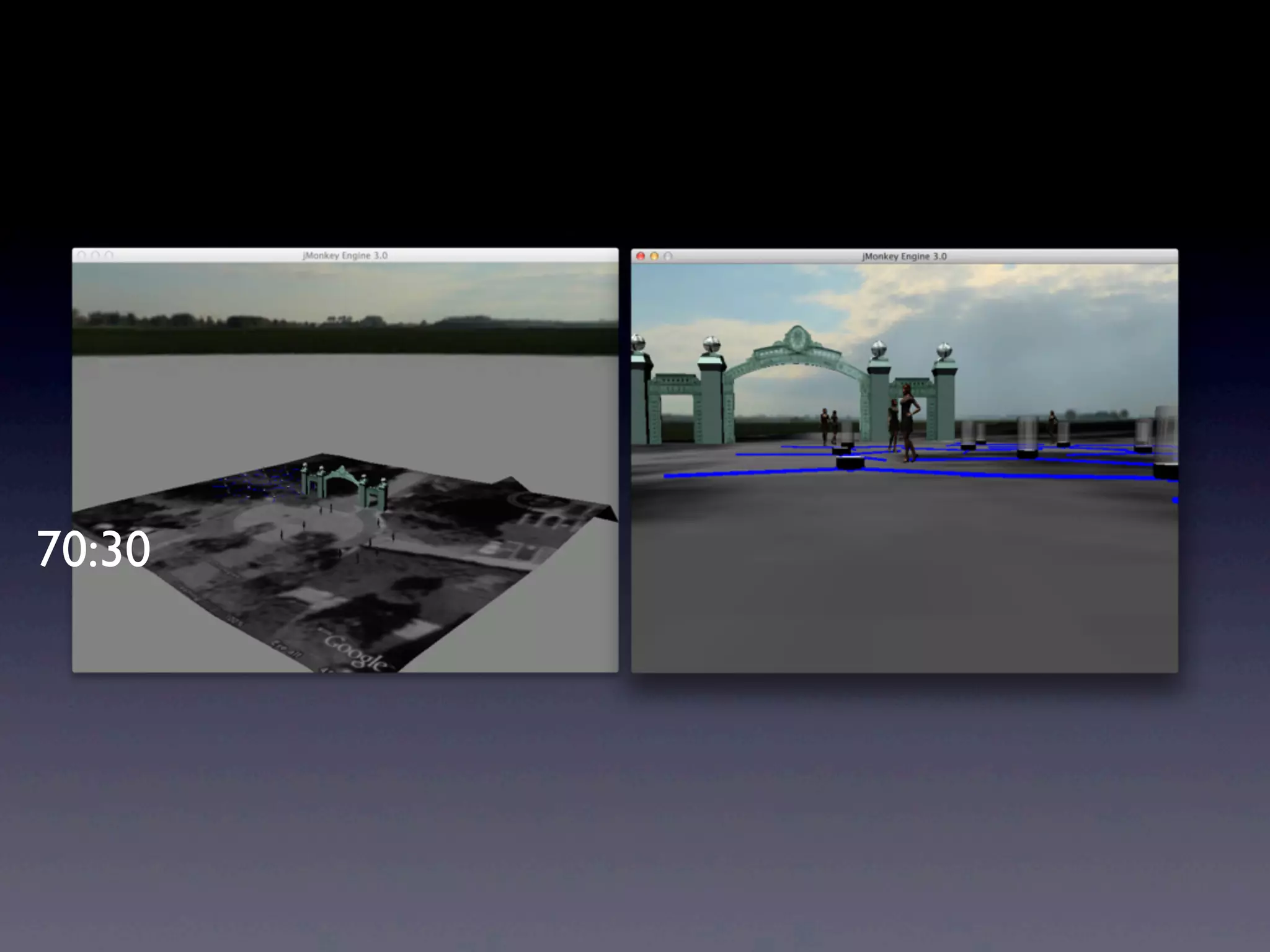
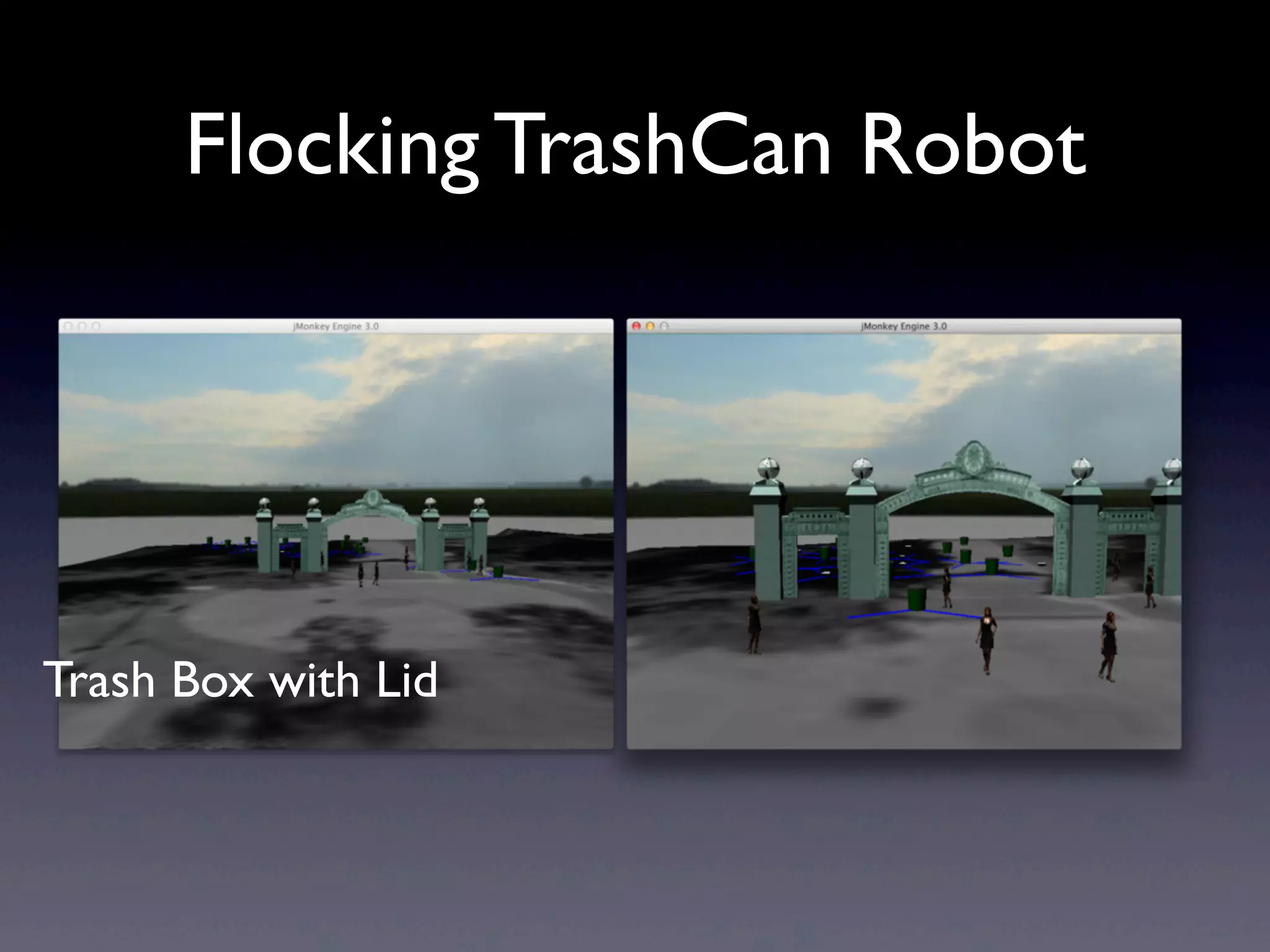
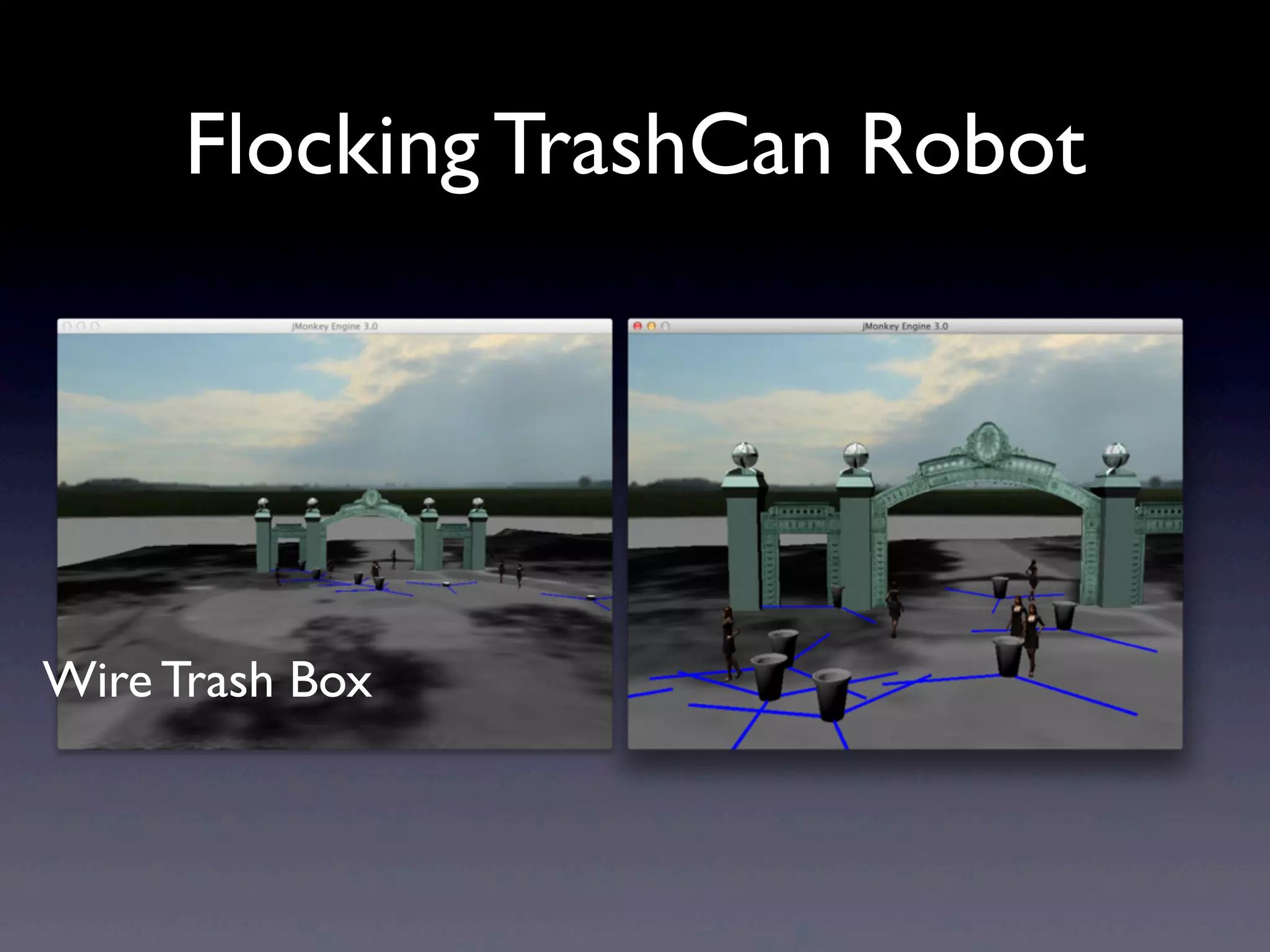
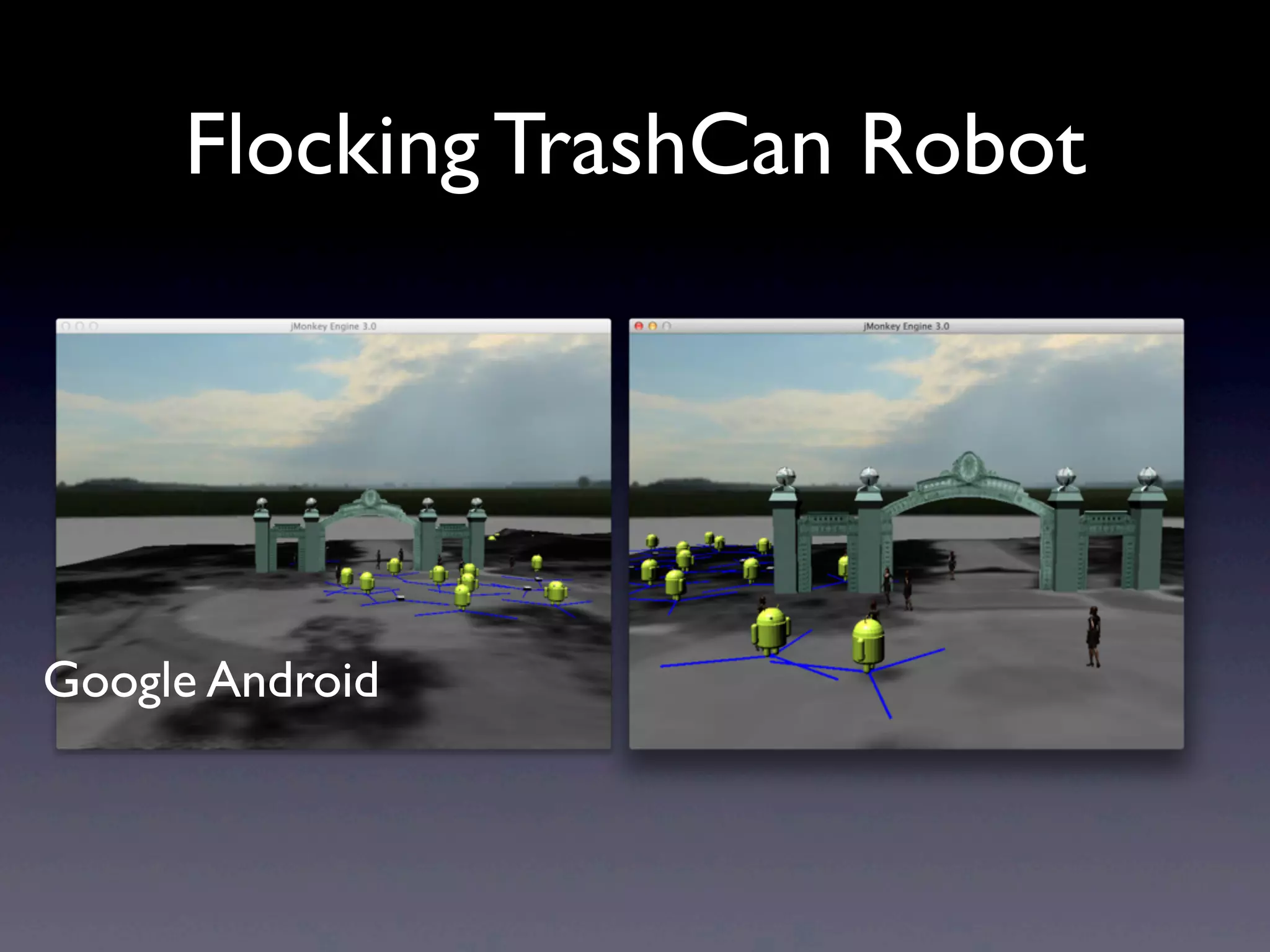
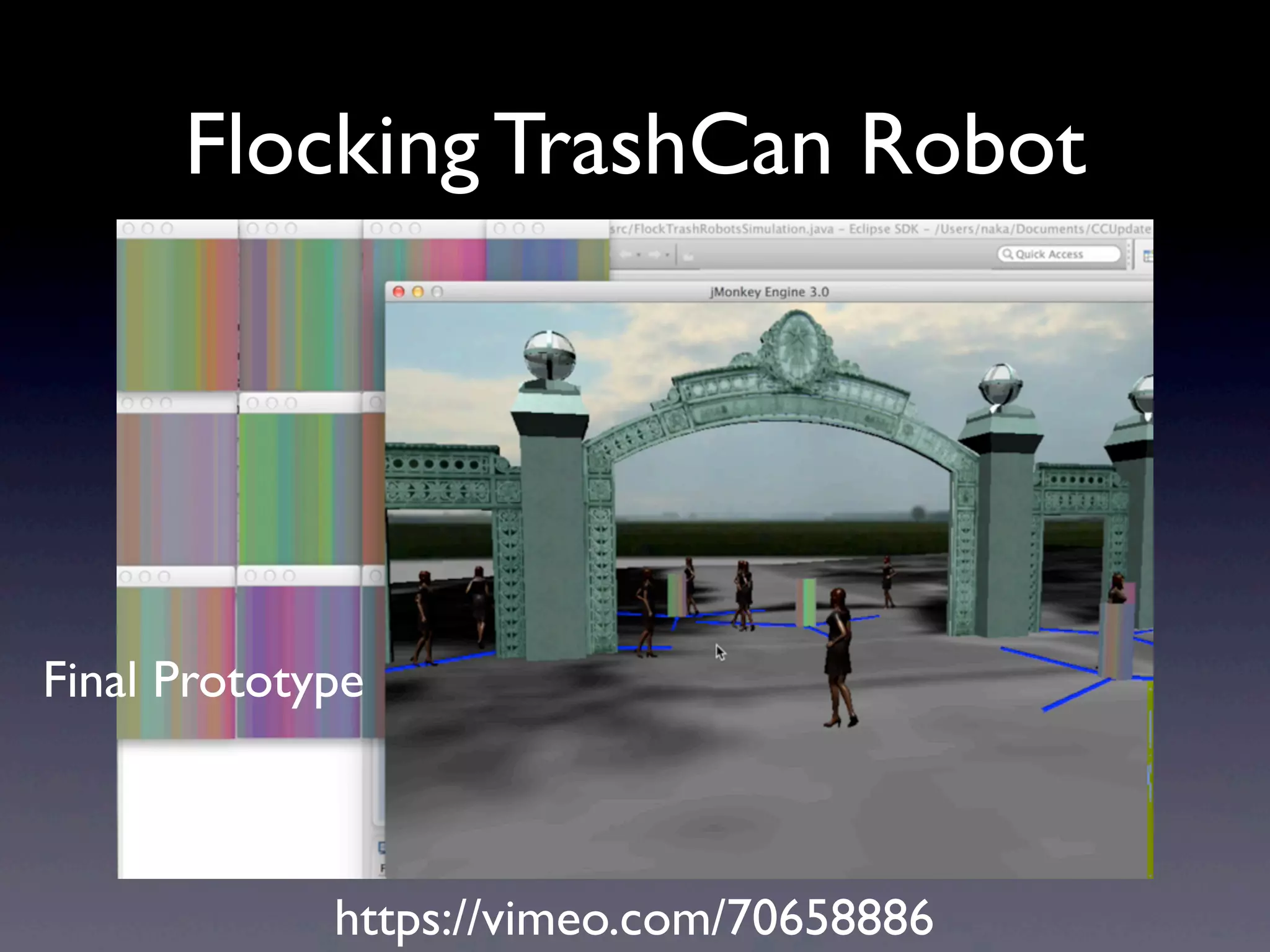

This document discusses a proposed "Flocking TrashCan Robot" project to build robots that mimic flocking behavior to clean the UC Berkeley campus. The robots would include trash boxes and cleaner robots that follow simple flocking rules, allowing dynamic emergent behavior. Parameters like the ratio of different robot types and how they interact with people could be adjusted. A simulation and prototype were created to explore the concept. The goal is to use physical movement to activate spaces and allow interaction between people and robots.












































































